除了上册提到的仿真闭环平台、车辆动力学仿真之外,自动驾驶仿真还有交通流仿真、场景仿真、传感器仿真等模块,《2020-2021自动驾驶仿真产业链研究报告(下册)》针对这些领域的企业进行了研究梳理。
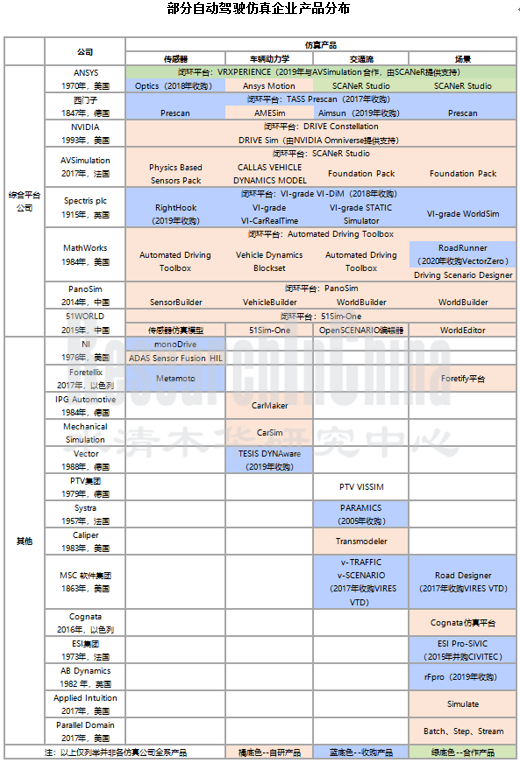
收购(或并购)对于企业完善技术布局无疑是一个快捷的选择,自动驾驶仿真领域也不例外。Ansys收购光学仿真领域软件OPTIS、西门子收购TASS,都是其自动驾驶仿真技术发展史上的重要转折点。
自动驾驶仿真行业发展成熟度越高,行业壁垒越发明显。仿真巨头所构建的技术、资金壁垒,对初创公司发展带来不小阻力。“单科”玩家或被收购,或引入外部支持,终究难逃巨头影响。
收购“单科”领先企业,成为巨头完善布局的便捷选择
1、场景编辑软件RoadRunner的所属公司VectorZero被仿真综合平台MathWorks收购,仿真工具一并纳入MATLAB/Simulink产品体系
RoadRunner隶属于VectorZero,是一个场景编辑软件。其可以创建环境和道路,生成包含环形交叉路口、交叉路口和桥梁的复杂道路网络,以及自定义交通标牌和标记。
RoadRunner的主要优势在于:
①编辑工具丰富,包括道路工具、交叉路口工具、车道编辑工具、标记工具和道具部署编辑工具等。
②三维场景快速填充:通过RoadRunner Asset Library插件,用户可使用其中的三维模型快速填充三维场景。
而MathWorks,正是看中RoadRunner三维场景能力。
2020年4月,仿真综合平台MathWorks收购VectorZero,将RoadRunner工具并入到MATLAB/Simulink产品体系,将其定位为“针对自动驾驶仿真设计三维场景”。2020年5月,MATLAB R2020a版本中,Automated Driving Toolbox即新添了RoadRunner工具。

2、仿真综合平台Spectris plc先后收购VI-grade(车辆动力学仿真)、RightHook(传感器仿真)
2018年7月,Spectris plc收购整车动力学、驾驶模拟器玩家VI-grade,进军车辆测试模拟领域;
2019年2月,Spectris plc收购传感器仿真玩家RightHook,后期该公司并入VI-grade。
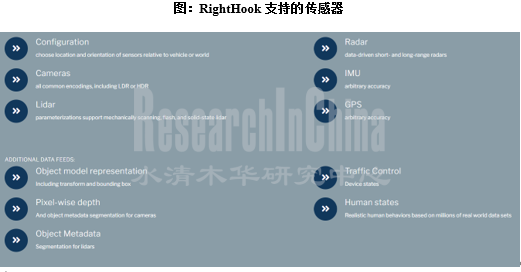
RightHook的优势在于:
①提供一整套的仿真工具链,包括RightWorld,RightWorldHD,RightWorldHIL 等。
②基于高精度地图进行模拟,其根据各自动驾驶公司所用的高精度地图,来重构整个模拟环境,测试的环境就是真实的驾驶环境。
VI-grade车辆动力学模型VI-CarRealTime,则能够提供软硬件在环等一系列的动力学仿真服务。
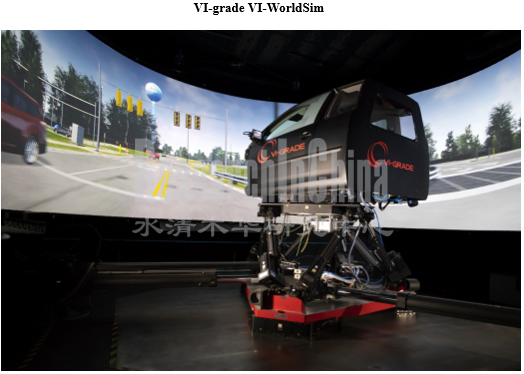
2020年11月,VI-grade推出VI-WorldSim,为ADAS & 自动驾驶汽车提供城市、公共道路测试环境。VI-WorldSim的仿真模块包括交通、行人、照明、天气和传感器,用户能够通过一个直观和易于使用的桌面编辑器为汽车开发项目创建和测试场景。
值得注意的是,在该产品中,RightHook提供驾驶模拟器的集成视觉环境。这意味着,两家公司在运营和产品上,已实现合并。
初创企业融资加码,力争改变“被收购”命运
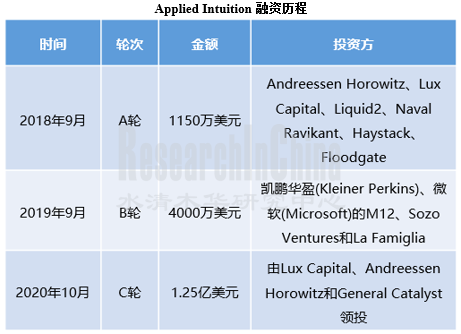
1、Applied Intuition引入1.25亿美元融资
Applied Intuition由Qasar Younis和Peter Ludwig(两位创始人均来自Google)于2017年创办,该公司2020年营收约在2600万美元。Applied Intuition的优势在于,可在短时间内使用真实数据/合成数据搭建复杂场景交互,生成数千个排列以覆盖边缘场景情况。同时,在模拟过程中,虚拟车辆的仪表盘还能实时显示类似 “虚拟路口和障碍对车辆加速的影响,以及乘客舒适度” 等信息。
2020年10月22日, Applied Intuition C轮融资引入1.25亿美元,由Lux Capital、Andreessen Horowitz和General Catalyst领投。此轮融资后,Applied Intuition估值达12.5亿美元。

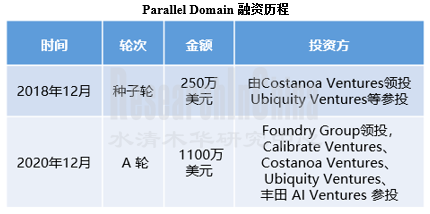
2、场景仿真创企Parrallel Domain获1100万美元A轮融资,丰田参投
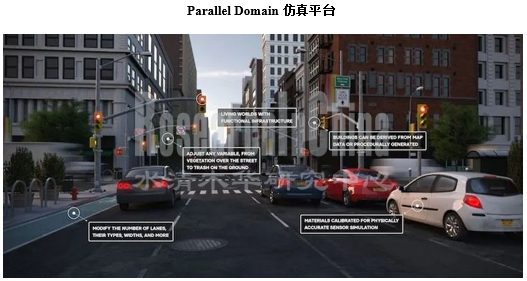
Parallel Domain成立于2017 年,由Kevin McNamara(有苹果自动驾驶技术背景)创办。Parallel Domain可以为传感器 (包括激光雷达传感器和摄像头) 合成白天、夜晚、雾天、雨天、城市等多种场景,同时嵌入交通信号灯,车辆,行人和动物等混杂要素。其仿真平台提供了丰富的元数据,允许用户试验各种新的传感器和技术配置。
2020年10月,Parallel Domain获得了1100万美元的A轮融资,此轮融资由Foundry Group领投,Calibrate Ventures、Costanoa Ventures、Ubiquity Ventures、丰田 AI Ventures 参投。
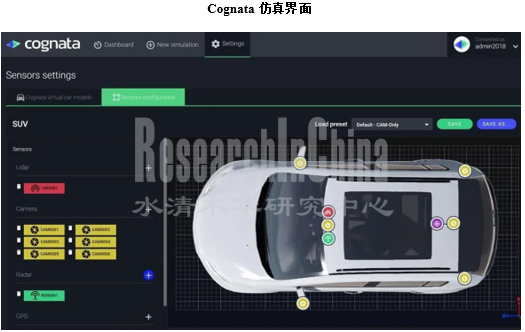
3、场景仿真企业Cognata在2020-2021年新增现代摩比斯、Atlatec、Ouster等合作伙伴,加速产品落地
Cognata 利用人工智能、 深度学习和计算机视觉的结合, 在其3D 模拟平台上重现城市, 为客户提供各种模拟现实世界测试驾驶的测试场景。2020年,Cognata新增多家合作企业,在产品运用及丰富度提升上加速发展。
①2020年11月,Cognata与Atlatec达成合作,在Cognata仿真平台上支持Atlatec的高清地图,为客户提供可用于大规模精准虚拟验证不同类型环境的能力;
②2021年1月,Cognata与Ouster达成合作,双方将在Cognata的仿真软件中开发一个新的高精度虚拟激光雷达模型。
根据《2020中国自动驾驶仿真蓝皮书》发布的数据,目前自动驾驶算法测试分布情况:约90%用仿真平台完成、9%在测试场完成、1%在开放道路完成。随着仿真技术水平的提高和应用的普及,行业旨在达到99.9%测试量通过仿真平台完成,封闭测试完成0.09%,实路测试完成0.01%。自动驾驶进入下半场,商业化应用带来暴增的测试需求或将催生仿真行业新一轮洗牌。
第四章 道路天气环境和交通场景仿真研究
4.1 交通场景仿真(交通流仿真)
4.1.1 交通场景仿真(交通流仿真)概述
4.1.2 交通场景仿真分类
4.1.3 交通场景仿真相关企业信息
4.1.4 PTV-VISSIM
4.1.4.1 PTV公司及主要产品
4.1.4.2 仿真方案VISSIM
4.1.4.3 VISSIM 列队跟驰模型
4.1.4.4 VISSIM 产品更新
4.1.4.5 VISSIM 自动驾驶应用
4.1.5 CorSim
4.1.5.1 CORSIM产品简介
4.1.5.2 CORSIM版本更新
4.1.6 PARAMICS
4.1.6.1 PARAMICS简介
4.1.6.2 PARAMICS功能特点
4.1.6.3 PARAMICS 版本更新
4.1.7 Transmodeler
4.1.7.1 Transmodeler 简介
4.1.7.2 Transmodeler 主要功能
4.1.7.3 Transmodeler 历代版本
4.1.7.4 Transmodeler 版本更新
4.1.7.5 Transmodeler 车道级网络
4.1.8 AIMSUN
4.1.8.1 Aimsun简介
4.1.8.2 Aimsun Next
4.1.8.3 Aimsun Next产品特性
4.1.8.4 Aimsun Next版本更新
4.1.8.5 Aimsun Next新版本功能模块配置
4.1.9 SUMO
4.1.9.1 SUMO简介
4.1.9.2 SUMO功能模块
4.1.9.3 SUMO特点
4.1.9.4版本更新
4.2 虚拟场景(天气、道路、交通等)构建
4.2.1 虚拟场景(天气、道路、交通等)构建简介
4.2.2 道路环境仿真&天气环境仿真
4.2.3 虚拟场景构建公司概览
4.2.4 ESI Pro-SiVIC
4.2.4.1 ESI公司简介
4.2.4.2 ESI收购和整合历程
4.2.4.3 ESI集团产品分布
4.2.4.4 Pro-SiVIC 简介
4.2.4.5 Pro-SiVIC 应用领域
4.2.4.6 Pro-SiVIC 操作流程及元素库
4.2.4.7 版本历程
4.2.4.8 版本更新
4.2.5 rFpro
4.2.5.1 rFpro公司简介
4.2.5.2 rFpro ADAS & AUTONOMOUS解决方案
4.2.5.3 rFpro在VR中进行自动驾驶测试,支持导入地图模型
4.2.5.4 rFpro的数字道路模型
4.2.5.5 rFpro与英伟达合作虚拟环境
4.2.5.6 rFpro合作伙伴
4.2.6 Cognata
4.2.6.1 Cognata简介
4.2.6.2 Cognata仿真平台
4.2.6.3 Cognata大规模场景生成
4.2.6.4 合作动态
4.2.7 Parallel Domain
4.2.7.1 Parallel Domain公司简介
4.2.7.2 Parallel Domain仿真平台
4.2.7.3 Parallel Domain A轮融资
4.2.8 AAI
4.2.8.1 AAI简介
4.2.8.2 AAI主要产品&解决方案
4.2.8.3 AAI应用
4.2.8.4 AAI Replicar
4.2.8.5 AAI 场景克隆和提取
4.2.8.6 AAI传感器仿真
4.2.8.7 合作动态
4.2.9 Applied Intuition
4.2.9.1 Applied Intuition简介
4.2.9.2 Applied Intuition仿真平台
4.2.9.3 Applied Intuition应用案例
4.2.9.4 丰田&Applied Intuition
4.2.9.5 Applied Intuition最新动态
4.2.10 Ansible Motion
4.2.10.1 Ansible Motion简介
4.2.10.2 解决方案
4.2.10.3 针对乘用车的解决方案
4.2.11 UNITY
4.2.11.1 UNITY简介
4.2.11.2 Unity SimViz
4.2.11.3 AirSim on Unity
4.2.12 VectorZero-RoadRunner
4.2.13 CityEngine
4.2.13.1 CityEngine简介
4.2.13.2 CityEngine 版本更新
4.2.14 VTD
4.2.14.1 MSC Software
4.2.14.2 VTD简介
4.2.14.3 VTD组成部分
4.2.14.4 VTD应用领域
4.2.14.5 OpenDRIVE场景编辑器
第五章 传感器仿真研究
5.1 传感器仿真简述
5.2 传感器仿真举例
5.3 传感器仿真相关企业信息
5.4 MonoDrive
5.4.1 MonoDrive简介
5.4.2 MonoDrive传感器模拟器
5.4.3 MonoDrive 仿真器性能
5.4.4 MonoDrive 测试模式
5.4.5 MonoDrive产品工作流程
5.4.6 monoDrive 摄像头模拟器
5.5 RightHook
5.5.1 RightHook 简介
5.5.1 RightHook 仿真简介
5.5.2 RightHook 支持的传感器
5.5.3 RightHook 仿真的工作流程
5.5.4 RightHook 解决方案
5.6 Metamoto
5.6.1 公司简介
5.6.2 Metamoto仿真平台
5.6.3 合作事件
5.6.4 Metamoto被收购
5.7 OTSL
5.7.1 公司简介
5.7.2 COSMOSIM
5.7.3 合作事件
第六章 仿真接口和HIL研究
6.1 仿真系统接口简介
6.2 仿真系统接口分类
6.3 硬件在环仿真简介
6.4 硬件在环仿真相关企业信息
6.5 美国国家仪器
6.5.1 NI 简介
6.5.2 NI 软件连接解决方案
6.5.3 NI 2023年仿真营收预估
6.5.4 NI 行业应用
6.5.5 NI 汽车雷达测试系统VRTS
6.5.6 NI 模块化测试平台
6.5.7 NI 摄像头和V2X HIL测试
6.5.8 NI ADAS传感器融合HIL测试解决方案
6.5.9 NI 动力总成HIL测试解决方案
6.6 ETAS
6.6.1 ETAS简介
6.6.2 ETAS测试与验证服务——LABCAR
6.6.3 ETAS测试与验证服务——协同仿真平台COSYM
6.7 Vector
6.7.1 Vector简介
6.7.2 Vector闭环测试系统
6.7.3 VECTOR HIL的具体应用案例
6.7.4 VT System
6.8 dSPACE
6.8.1 dSPACE 简介
6.8.2 dSPACE 方案组合
6.8.3 dSPACE 实时仿真系统解决方案
6.8.4 dSPACE 传感器仿真
6.8.5 dSPACE ASM用于ADAS及自动驾驶AD
6.8.6 dSPACE 传感器模型
6.8.7 传感器模型集成示例
6.8.8 dSPACE 云端解决方案
6.8.9 合作动态
6.8.10 合作伙伴
6.8.11 企业动态
第七章 趋势展望