未来2-3年电子电气架构升级是主要方向,这也将加速域控制器的引入。汽车电子电气架构升级主要体现在软件架构、硬件架构、通信架构三个方面,软件架构逐步实现分层解耦,硬件从分布式向域控制/中央集中式发展,车载网络骨干由LIN/CAN总线向以太网方向发展。
目前来看,预计大部分主机厂仍会使用混合域的EEA架构,即部分功能域集中化,形成“分布式ECU+域控制器“的过渡方案,最后形成"super controller(中央超级计算机)+ zonal control unit(区控制器)"的架构,这一EEA演进过程可能长达5-10年。
从主机厂规划看,自动驾驶域、智能座舱域、中央控制域或成为三大主要增量域。
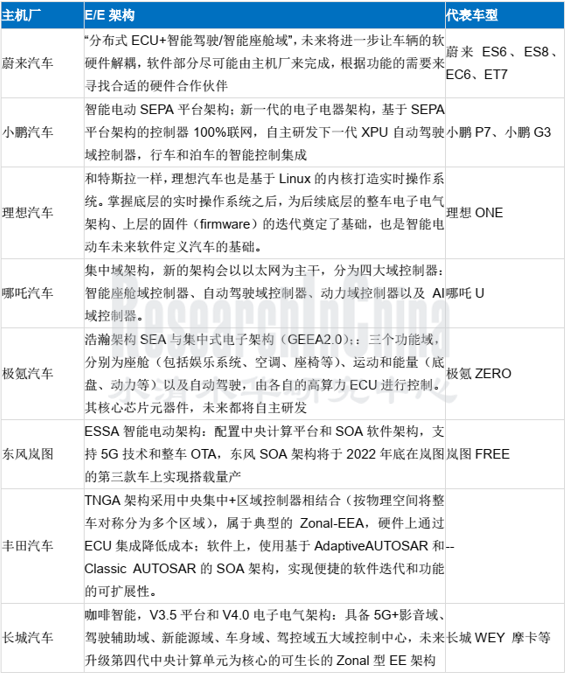
部分OEM主机厂E/E架构与域控布局
来源:佐思汽研整理
自动驾驶域控制器四类玩家间的竞争格局
随着汽车E/E架构从分布式向域集中式演化,汽车整车厂和汽车电子供应商的供应关系正发生深刻变革,汽车电子供应商数量将逐渐减少,域控制器供应商的地位将愈发重要,也吸引了越来越多的厂商涉足这一领域。
我们将自动驾驶域控制器的玩家大致分为四类:Global Tier1(系统集成商)、Local Tier1(系统集成商)、自动驾驶域控软件平台厂商、以及OEM厂商。
自动驾驶域控制器的竞争格局(部分Player)

来源:佐思汽研
(1)OEM主机厂
长期来看,集中式E/E架构下ECU数量将减少,功能弱化,主导权可能从供应商向主机厂转移,如特斯拉自研中央计算机CCM+区域车身控制器,E/E架构至少领先传统OEM厂商5年。国内初创企业,如蔚来、小鹏、威马、理想、上汽智己等,也已实现或宣布将自研自动驾驶域控制器,以掌握未来软件定义汽车下底层的硬件自主权,实现更加强大的OTA升级能力。
以小鹏汽车为例,小鹏计划自研的XPU自动驾驶智能控制单元实现4合1,将行车和泊车的智能控制集成,打破之前4个域之间的交互壁垒,实现更深度的域融合。
虽然越来越多的头部车企开始组建自己的软件研发团队,着手自主开发域控制器硬件以及相应的配套软件,但也几乎不可能全部自研,仍将依赖供应商提供硬件设计制造,以及更标准化的“中间件”,尤其从单域到跨域(车身域、座舱域、自动驾驶域),复杂度更是指数级上升,跨域(多域融合)高性能计算软件平台的重要性也将愈发凸显,映驰科技、东软睿驰、TTTech等域控软件平台的价值将逐渐显现。
(2)Global Tier1(系统集成商)
在未来汽车E/E架构当中,尤其进入到中央计算单元+区控制器阶段,软硬件彻底解耦,硬件外设化,整车厂面临真正的挑战在于软件架构,传统的汽车供应商体系会受到巨大冲击,软件供应商的价值将进一步凸显,将出现一些域控软件的巨头企业。
为应对这一趋势变化,Global Tier1巨头也在积极搭建独立的软件平台产品以应对竞争,2021年CES采埃孚发布其最新的中间件产品,博世2020年也发布了开源自动驾驶中间件iceoryx(冰羚),同时纷纷组建规模庞大的软件研发团队加快转型步伐。
采埃孚开发的中间件计划于2024年开始搭载在量产车辆上,这一开放式的软件平台是车辆的计算运行系统及其软件应用之间的“桥梁”;同时,采埃孚将建立一个全球软件中心,以应对未来软件需求所带来的挑战。
采埃孚最新发布的中间件产品

来源:采埃孚
(3)自动驾驶域控软件供应商
专注于自动驾驶软件平台开发的新进厂商格外值得关注,软件出身的域控平台供应商具备向传统Tier1发起挑战的可能性,以奥迪zFAS域控软件供应商TTTech为例,全球搭载TTTech域控软件平台“MotionWise”的控制器累计已有25个以上车型SOP量产。在国内,TTTech与上汽集团合资成立了创时智驾,已为上汽成员企业配套量产iECU自动驾驶域控制器产品。
国内企业,映驰科技、东软睿驰、未动科技、纽劢科技等也纷纷推出域控软件平台产品,以抢占市场先机。域控软件平台(中间件)(介于汽车操作系统和软件应用程序之间),主要作用是将计算机硬件从软件应用程序中抽象出来,同时也作为应用程序间通信的桥梁,随着通信架构由“面向信号”向“面向服务”转变,域控中间件价值将愈发凸显。
通信架构由“面向信号”向“面向服务”转变
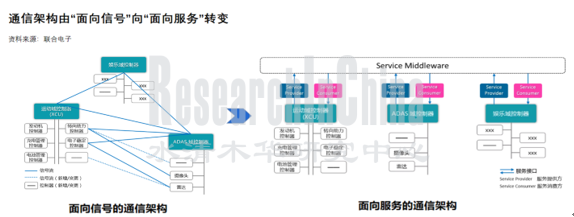
来源:联合汽车电子
域控中间件为整车厂和Tier 2之间搭了一个桥梁,即所谓Tier 1.5,即上连整车厂和Tier 1的软件,下连Tier 2的硬件。新的开发模式,将推动软件供应商成为汽车行业中的重要角色。域控中间件对软件水平要求很高,越来越多的初创软件厂商开始介入这一市场,将对以硬件见长的 Tier1 发起挑战。
部分域控软件供应商一览

来源:佐思汽研
(4)Local Tier1(系统集成商)
我们可以看到,越来越多的Local Tier1自研域控制器,构建软硬件一体的自动驾驶全栈解决方案,在华为的MDC计算平台硬件上,运行着创新研发的智能驾驶操作系统AOS、VOS和MDC Core,并配套提供完善的开发工具链,合作伙伴可以基于MDC开发算法和应用,形成产业生态圈。华为MDC810计算平台已在北汽极狐阿尔法S华为HI版上实现量产。
华为MDC计算平台产业生态圈

来源:华为
为吉利、长安、奇瑞、宝能等配套的国产ADAS供应商福瑞泰克也已着手域控制器的研发,致力于为成本敏感的大规模量产乘用车提供全栈解决方案。福瑞泰克基于成熟的L2系统,设计了模块化、可裁剪、可扩展的软硬件一体化技术架构,高起点开发并推出了面向量产的自动驾驶域控解决方案,其中包括ADC20、ADC25、ADC30域控制器,为主机厂提供灵活配置的自动驾驶系统。
福瑞泰克域控制器产品技术路线图
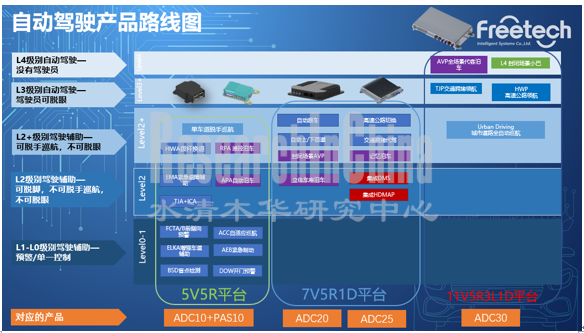
来源:福瑞泰克
德赛西威为小鹏P7提供自动驾驶域控制器IPU03,其2020年出货量超过一万台,已实现规模化量产,同时基于英伟达ORIN计算平台的IPU04也处于研发中,计划2022年在理想汽车上装车量产。作为英伟达全球六大合作伙伴之一,德赛西威已占据了核心卡位优势。
此外,诸如宏景智驾、小马智行、智行者、经纬恒润、英博超算等也纷纷布局自动驾驶域控制器,一方面为自身的系统集成方案配套,另一方面积极开拓OEM主机厂客户,为客户提供软硬一体的解决方案,比如宏景智驾已与江淮汽车形成深度合作并组建合资公司“域驰智能”,英博超算则为奇瑞新能源提供了L2.99自动驾驶域控制器。
智能座舱域,融合越来越多的ADAS功能将成为趋势
最终,智能汽车将成为一部移动的超级计算机兼数据中心,并将诞生新的Wintel。未来高级自动驾驶汽车时代的核心技术将是计算平台、操作系统和应用软件,预计2030年以后,随着自动驾驶技术路线的逐渐成熟,自动驾驶高性能芯片将与座舱主控芯片进一步向中央计算芯片融合,从而通过集成进一步提升运算效率并降低成本。
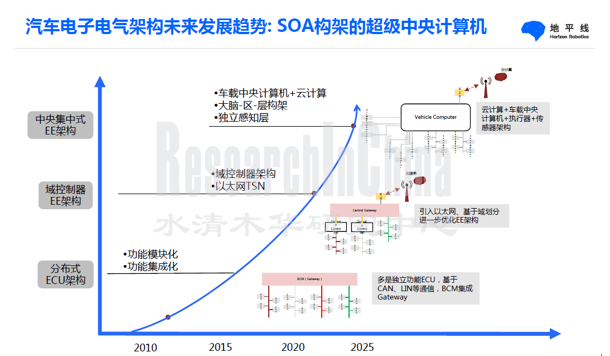
来源:地平线
在这一趋势下,座舱电子企业无论是Tier1还是软件厂商,都在谋求将越来越多的的ADAS功能融入座舱域中(典型的比如自主泊车、DMS,未来还希望进一步融入更高级的L1/L2级ADAS功能),并提升智能座舱域的功能安全等级。
与智能驾驶域控制器类似,智能座舱领域也涌现出大量的域控软件供应商,成立仅两年多的软件基础设施供应商镁佳科技近期宣布完成超1亿美元融资,并已落地合创007、理想汽车等OEM主机厂座舱平台订单,资本已开始重视这一市场的广阔前景。
从OEM主机厂的角度来看,自研座舱域控制器的迫切性可能不如自动驾驶那么明显,主要在于座舱功能在短中期内都难以成为消费定制付费的选择,寻求第三方软件合作伙伴或是潜在选项,并积极探索实现软硬件解耦,实现更好的客户体验同时降低成本,在这一大背景下,中科创达、镁佳科技等企业已顺势崛起。
智能座舱域控制器的竞争格局(部分Player)

来源:佐思汽研
域控制器整体市场规模前景,未来5年渗透率将大幅度提升
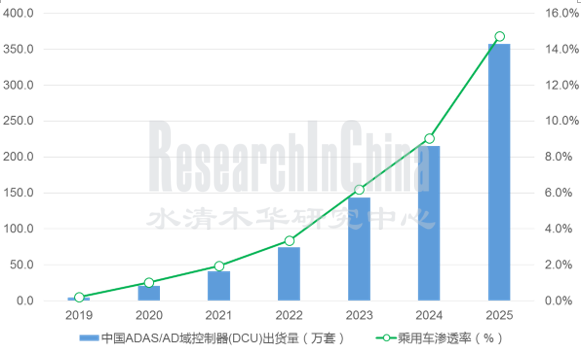
从中国来看,现阶段行业正大规模力推L2+自动驾驶汽车量产落地,甚至无限接近于L3的L2++或L2.9级自动驾驶也正快速落地,现阶段主要受特斯拉Model系列、蔚来ES系列、小鹏P7等车型拉动。按照佐思汽研测算,预计到2025年,中国乘用车ADAS/AD域控制器年出货量将达到356.5万套,乘用车前装自动驾驶域控制器渗透率将达14.7%。
中国ADAS/AD域控制器(DCU)出货量预测(万套),2019-2025
来源:佐思汽研
第一章 汽车电子电气架构(EEA)演进
1.1 整车电子电气架构(EEA)演进
1.1.1 汽车EEA升级包括软件架构、硬件架构、通信架构三个维度
1.1.2 硬件架构升级:分布式向域控制/中央集中式发展
1.1.3 硬件架构升级:域集中式EEA
1.1.4 硬件架构升级:域控制器架构优点
1.1.5 硬件架构升级:计算集中式+区控制器
1.1.6 硬件架构升级:中央集中式电子电气架构(Zonal EEA)
1.1.7 硬件架构升级:车载中央计算机(VCC)
1.1.8 硬件架构升级:基于多芯片的软件部署架构,也将会是SOA架构
1.1.9 软件架构升级:Adaptive AUTOSAR的应用
1.1.10 通信架构升级:整车主干网络向以太网演进
1.2 OEM和Tier1的EEA架构案例
1.2.1 三域电子电气架构
1.2.2 国内外OEM厂商新一代EE架构与域控布局(1)
1.2.3 国内外OEM厂商新一代EE架构与域控布局(2)
1.2.4 大众MEB电子电气架构
1.2.5 宝马分层的电子电气架构
1.2.6 华为车载以太网下的域控制器构架
1.2.7 伟世通的电子电气架构
1.2.8 Model 3网络拓扑图
1.2.9 丰田Zonal架构概念
1.2.10 沃尔沃的Zonal架构
1.2.11 博世的Zonal架构概念
第二章 域控制器软硬件架构技术趋势
2.1 域控制器架构和需求分析
2.1.1 域控制器架构特征
2.1.2 域控制器软硬件开发需求分析
2.1.3 域控制器软硬件开发需求分析(1):硬件架构
2.1.4 域控制器软硬件开发需求分析(2):软件架构
2.1.5 域控制器软硬件开发需求分析(3):接口
2.2 核心在于掌握控制器的软件能力
2.2.1 “软件定义汽车”的域控制器系统架构
2.2.2 域控制器软件架构向Adaptive AutoSAR升级(1)
2.2.3 域控制器软件架构向Adaptive AutoSAR升级(2)
2.2.4 域控制器软件架构向Adaptive AutoSAR升级(3)
2.2.5 软件定义汽车的整体趋势
2.2.6 SOA汽车软件在域控制器上的部署
2.3 域控中间件价值将凸显
2.3.1 通信架构由“面向信号”向“面向服务”转变,域控中间件价值将凸显
2.3.2 计算基础平台将出现1.5级Tier1和新开发模式
2.3.3 Tier1积极布局域控基础软件
2.3.4 国内外布局域控基础软件的供应商一览
2.3.5 主机厂致力于从开源角度构建中间层,定义通信和服务以降低系统复杂度
2.3.6 中间件是未来软件价值增长的关键
2.3.7 域控制器软件平台厂商的重要性将愈发凸显
2.3.8 全球汽车软件整体市场规模预期
2.4 域控制器的全新商业模式
2.4.1 域控制器设计和生产:OEM与Tier1出现全新合作模式
2.4.2 掌握核心的域控制器全栈能力将成为Tier1的竞争焦点
2.4.3 主机厂、芯片供应商、Tier1 三方合作研发将成为一种趋势
2.4.4 具备全栈自研能力的OEM主机厂将倾向于自研域控制器
2.4.5 自动驾驶域控制器的竞争格局(四方Player的角色诉求)
2.4.6 智能座舱域控制器的竞争格局(三方Player的角色诉求)
第三章 自动驾驶域控制器技术和市场研究
3.1 ADAS/AD功能演进和域控制器
3.1.1 ADAS分布式ECU和ADAS/AD域控制器
3.1.2 ADAS/AD控制器与自动驾驶等级的关系
3.1.3 L0-L2级分布式系统方案
3.1.4 L2+级域集中式系统方案:多雷达域集中式方案
3.1.5 L2+级域集中式系统方案:多视觉的域集中式方案
3.1.6 L3-L4级域集中式系统方案
3.1.7 自动驾驶域控制器发展趋势
3.2 ADAS/AD域控制器方案
3.2.1 国外厂商布局ADAS/AD域控制情况一览(1)
3.2.2 国外厂商布局ADAS/AD域控制情况一览(2)
3.2.3 国外厂商布局ADAS/AD域控制情况一览(3)
3.2.4 国内厂商布局ADAS/AD域控制情况一览(1)
3.2.5 国内厂商布局ADAS/AD域控制情况一览(2)
3.2.6 国内厂商布局ADAS/AD域控制情况一览(3)
3.2.7 中国主要OEM厂商ADAS/AD域控制器平台方案和供应商(1)
3.2.8 中国主要OEM厂商ADAS/AD域控制器平台方案和供应商(2)
3.2.9 全球主要OEM厂商ADAS/AD域控制器平台方案和供应商
3.3 ADAS/AD域控制器技术对标
3.4 ADAS/AD域控制器主控芯片应用趋势
3.4.1 智能驾驶正在掀起一场算力竞赛
3.4.2 计算平台算力预埋,OTA持续升级软件
3.4.3 Mobileye 自动驾驶芯片方案
3.4.4 芯片厂商可能进一步转型为Tier0.5
3.4.5 Mobileye下一代自动驾驶芯片EyeQ 6
3.4.6 英伟达下一代计算平台芯片 Orin
3.4.7 瑞萨下一代自动驾驶芯片 R-CAR V3H
3.4.8 高通全新的Snapdragon Ride计算平台
3.4.9 下一代自动驾驶域控制器主控芯片技术参数对比
3.5 ADAS/AD域控制器市场规模前景
3.5.1 中国自动驾驶市场渗透率预测(万辆),2017-2025
3.5.2 中国ADAS/AD域控制器(DCU)出货量预测(万套),2019-2025
3.5.3 中国ADAS/AD域控制器(DCU)市场规模估算(亿元),2019-2025
第四章 智能座舱域控制器技术和市场研究
4.1 座舱域控制器发展趋势总结
4.1.1 智能座舱发展趋势
4.1.2 座舱娱乐域软件架构框图
4.1.3 下一代智能座舱系统框架
4.2 Tier1和OEM座舱域控制器方案
4.2.1 典型座舱域控制器厂商方案(1)
4.2.2 典型座舱域控制器厂商方案(2)
4.2.3 主要座舱软件解决方案汇总
4.2.4 全球主要主机厂智能座舱平台量产情况
4.2.5 中国主要主机厂智能座舱平台量产情况(1)
4.2.6 中国主要主机厂智能座舱平台量产情况(2)
4.3 智能座舱域控制器主控芯片
4.3.1 座舱域控制芯片发展趋势
4.3.2 未来座舱处理器发展趋势
4.3.3 主要企业座舱处理器发展规划(1)
4.3.4 主要座舱处理器对比(1)
4.3.5 主要座舱处理器对比(2)
4.3.6 主要座舱处理器对比(3)
4.4 座舱域控制器市场规模和前景
4.4.1 全球座舱域控制器出货量预测
4.4.2 中国智能座舱市场规模预测
4.4.3 中国智能座舱域控制器(DCU)出货量预测(万套),2019-2025
第五章 国外域控制器厂商研究
5.1 博世
5.1.1 博世自动驾驶产品线
5.1.2 博世EEA架构:下一代汽车架构演进和分工逻辑
5.1.3 博世EEA架构:车载中央计算机(VCC)和SOA架构
5.1.4 博世座舱域控制器:架构和优势
5.1.5 博世座舱域控制器:技术方案
5.1.6 博世座舱域控制器:系统架构
5.1.7 博世座舱域控制器:SOP量产计划
5.1.8 博世座舱域融合:融控产品系统架构(1)
5.1.9 博世座舱域融合:融控产品系统架构(2)
5.1.10 博世座舱域融合:融控产品系统架构(3)
5.1.11 博世自动驾驶域控制器:DASy技术演进
5.1.12 博世自动驾驶域控制器:DASy1.0基础版
5.1.13 博世自动驾驶域控制器:L1-L4级发展规划
5.1.14 博世自动驾驶域控制器:算力发展规划
5.1.15 博世成立智能驾驶与控制事业部实现跨域融合
5.2 伟世通
5.2.1 伟世通经营分析:2020年经营情况
5.2.2 伟世通经营分析:产品线
5.2.3 伟世通经营分析:对于座舱电子和自动驾驶的发展趋势规划
5.2.4 伟世通EEA架构规划:三域架构和Zone控制器
5.2.5 伟世通EEA架构规划:Supper Core和Zone的功能分配
5.2.6 伟世通EEA架构规划:Zonal架构的挑战
5.2.7 伟世通智能座舱域控制器:2021年全新一代SmartCore
5.2.8 伟世通智能座舱域控制器:基于高通8155/8195和6155平台的产品参数
5.2.9 伟世通智能座舱域控制器:典型客户群
5.2.10 伟世通自动驾驶域控制器:升级版DriveCore技术
5.2.11 伟世通自动驾驶域控制器: Drive Core优势
5.2.12 伟世通自动驾驶域控制器: Drive Core架构
5.2.13 伟世通自动驾驶域控制器: Drive Core开发工具
5.2.14 伟世通多域融合思路
5.3 大陆
5.3.1 大陆集团自动驾驶产品线布局
5.3.2 大陆面向SOA架构的域控制器开发理念(1)
5.3.3 大陆面向SOA架构的域控制器开发理念(2)
5.3.4 基于SOA的高性能计算单元(HPC)技术特性
5.3.5 大陆座舱域控制器:车身电子平台IIP
5.3.6 大陆座舱域控制器:合作和生态
5.3.7 大陆自动驾驶域控制器: ADCU
5.3.8 大陆自动驾驶域控制器:AI芯片布局
5.4 Veoneer
5.4.1 Veoneer自动驾驶产品线布局
5.4.2 Veoneer主动安全平台架构
5.4.3 Veoneer L2+ Hands-off 系统
5.4.4 Veoneer ADAS SW软件栈路线图 ASP1.0-ASP3.X
5.4.5 Veoneer ADAS ECU产品
5.4.6 Veoneer ADAS/AD ECU:宙斯计算平台
5.4.7 Veoneer ADAS/AD ECU 功能架构
5.4.8 Veonee自动驾驶软件开发
5.4.9 Veoneer 2021年新产品计划
5.5 采埃孚
5.5.1 采埃孚发布中间件平台并宣布建立全球软件中心
5.5.2 采埃孚中间件OS系统架构(1)
5.5.3 采埃孚中间件OS系统架构(2)
5.5.4 采埃孚中间件OS系统架构(3)
5.5.5 采埃孚自动驾驶域控制器:新一代采睿星(ProAI)架构
5.5.6 采埃孚自动驾驶域控制器:发展路线和量产计划
5.5.7 采埃孚与Mobileye 合作开发的coASSIST Level2+ 首发搭载10万元级经济型轿车
5.5.8 采埃孚自动驾驶域控制器:核心客户
5.5.9 采埃孚与微软合作
5.6 安波福
5.6.1 安波福智能汽车架构设计(SVATM )
5.6.2 安波福计划2022年量产区域控制器解决方案
5.6.3 安波福面向自动驾驶的卫星架构平台
5.6.4 安波福ICC座舱域控制器:产品特点和客户
5.6.5 安波福ICC座舱域控制器:发展规划
5.6.6 安波福ICC座舱域控制器:系统架构
5.6.7 安波福ICC座舱域控制器:产品规划和技术路线
5.6.8 安波福为宝马打造的Ultra PAD自动驾驶域控制器
5.6.9 宝马的自动驾驶方案
5.6.10 安波福自动驾驶域控制器:基于EyeQ 4/5 打造CSLP中央传感定位和规划平台
5.6.11 安波福自动驾驶域控制器:奥迪zFAS多域控制器
5.6.12 安波福自动驾驶域控制器:zFAS多域控制器系统结构
5.7 电装
5.7.1 电装智能座舱技术路线图
5.7.2 电装Harmony Core™集成式座舱系统:技术方案
5.7.3 电装Harmony Core™集成式座舱系统:架构特点
5.7.4 电装Harmony Core™集成式座舱系统:客户
5.7.5 电装ADAS/AD技术框架
5.8 佛吉亚歌乐
5.8.1 佛吉亚歌乐汽车电子产品线
5.8.2 佛吉亚歌乐汽车电子生态链
5.8.3 佛吉亚四大业务
5.8.4 佛吉亚座舱智能化平台(CIP):单处理器多屏融合系统
5.8.5 佛吉亚座舱域控制器:打造多屏融合的座舱集成系统
5.8.6 佛吉亚座舱域控制器:芯片合作
5.8.7 佛吉亚与一汽红旗合作的红旗H9智慧座舱
5.9 松下
5.9.1 松下SPYDR座舱域控制器业务
5.9.2 松下座舱域控制器解决方案:SPYDR 2.0、SPYDR 3.0
5.9.3 松下座舱域控制器解决方案:SPYDR 2.0、SPYDR 3.0
5.9.4 松下座舱电子布局: SPYDR 2.0
5.9.5 松下座舱电子计算架构: SPYDR 2.0
5.9.6 松下座舱系统软件架构
5.10 三星哈曼
5.10.1 三星哈曼组织介绍
5.10.2 三星哈曼数字座舱产品线
5.10.3 三星哈曼数字座舱域控制器:技术方案
5.10.4 三星哈曼自动驾驶域控制器:DRVLINE
5.10.5 三星哈曼自动驾驶域控制器:DRVLINE系统架构
5.10.6 域控制器芯片:三星座舱处理器Exynos 88XX系列
5.10.7 域控制器芯片:三星座舱处理器Exynos Auto V9系列
5.11 LG电子
5.11.1 大众汽车E3域控制器架构
5.11.2 LG电子座舱娱乐域控:ICAS3(1)
5.11.3 LG电子座舱娱乐域控:ICAS3(2)
5.11.4 LG电子座舱娱乐域控软件:WebOS 2.0 开源平台
5.11.5 LG电子座舱娱乐域控软件:BlackBerry QNX虚拟机
5.11.6 LG电子座舱娱乐域控软件:ACRN hypervisor虚拟机
5.12 Tesla自动驾驶平台
5.12.1 特斯拉Autopilot硬件发展路线
5.12.2 特斯拉Autopilot功能升级路径:HW1.0—HW3.0
5.12.3 特斯拉OTA重大自动驾驶功能升级一览
5.12.4 特斯拉Hardware 4.0将采用台积电7nm SOW先进封装技术
5.12.5 特斯拉域控制器AutoPilot 3.0功能特点
5.12.6 特斯拉AutoPilot 3.0芯片:搭载了双冗余FSD芯片
5.12.7 特斯拉AutoPilot 3.0芯片: FSD芯片架构和NNP神经网络处理器
5.12.8 Tesla Model 3 行车电脑ECU架构
5.12.9 Tesla Model 3 行车电脑ECU多媒体和自动驾驶主板
5.12.10 Tesla Model 3 中央计算模块 CCM
5.12.11 特斯拉域控制器AutoPilot 1.0—3.0系统参数汇总
5.12.12 特斯拉域控制器AutoPilot 2.5功能特点(1)
5.12.13 特斯拉域控制器AutoPilot 2.5功能特点(2)
5.12.14 特斯拉域控制器AutoPilot 2.0功能特点(1)
5.12.15 特斯拉域控制器AutoPilot 2.0功能特点(2)
5.13 TTTech
5.13.1 TTTech简介
5.13.2 TTTech自动驾驶解决方案
5.13.3 TTTech自动驾驶控制器平台技术优势
5.13.4 TTTech自动驾驶安全软件平台: MotionWise
5.13.5 TTTech自动驾驶安全软件平台: MotionWise
5.13.6 TTTech与上汽合作:开展智能驾驶中央决策控制器开发
第六章 国内域控制器厂商研究
6.1 华为
6.1.1 华为CC架构
6.1.2 基于CC架构,推出MDC+CDC+VDC 三大域控制器平台
6.1.3 华为CDC智能座舱平台
6.1.4 华为鸿蒙OS智能座舱平台和可插拔车机模组
6.1.5 华为麒麟990A车规级座舱芯片
6.1.6 华为MDC自动驾驶计算平台:产品线
6.1.7 华为MDC自动驾驶计算平台:MDC 210 和MDC 610 产品参数
6.1.8 华为MDC自动驾驶计算平台:最新发布MDC810
6.1.9 华为MDC自动驾驶计算平台:昇腾 910/310主控芯片
6.1.10 华为MDC自动驾驶计算平台:平台框架
6.1.11 华为MDC自动驾驶计算平台:硬件平台
6.1.12 华为MDC自动驾驶计算平台:软件与工具链
6.1.13 华为MDC自动驾驶计算平台:软件与工具链
6.1.14 华为MDC自动驾驶计算平台:软件与工具链
6.1.15 华为MDC自动驾驶计算平台:软件与工具链
6.1.16 华为MDC自动驾驶计算平台:车规级安全平台
6.1.17 华为MDC自动驾驶计算平台:ISO26262和ASPICE认证
6.2 德赛西威
6.2.1 德赛西威战略布局:智能驾驶舱、智能驾驶、车联网三大业务群
6.2.2 德赛西威座舱域控制器:理想ONE
6.2.3 德赛西威座舱域控制器:瑞虎8 PLUS
6.2.4 德赛西威自动驾驶域控制器:与小鹏汽车、英伟达达成战略合作
6.2.5 德赛西威自动驾驶域控制器:应用方向Highway Pilot与AVP方案
6.2.6 德赛西威自动驾驶域控制器:IPU01-IPU04功能特点和量产进度
6.2.7 德赛西威自动驾驶域控制器:IPU01-IPU04技术路线图
6.2.8 德赛西威IPU04落地理想汽车
6.2.9 德赛西威自动驾驶域控制器:IPU04 硬件架构
6.2.10 德赛西威自动驾驶域控制器:IPU04 软件架构
6.2.11 德赛西威ECU和域控制器生态系统建设
6.3 东软集团
6.3.1 东软智能网联汽车业务布局
6.3.2 东软智能座舱整体系统架构示例
6.3.3 东软汽车电子智能座舱:与吉利亿咖通合作
6.3.4 东软汽车电子智能座舱:与一汽红旗和英特尔合作
6.3.5 东软汽车电子智能座舱:与长城合作VCP车辆计算平台
6.4 东软睿驰
6.4.1 东软睿驰软件定义计算 (SDC) 解决方案
6.4.2 东软睿驰SDC业务核心平台:NeuSAR
6.4.3 东软睿驰基础软件产品NeuSAR 3.0及ADAS&ADS新品发布
6.4.4 东软睿驰面向SDV软件架构
6.4.5 东软睿驰面向SDV系列解决方案
6.4.6 东软睿驰基础软件产品NeuSAR 3.0(1)
6.4.7 东软睿驰基础软件产品NeuSAR 3.0(2)
6.4.8 自动驾驶域控制器X-BOX 3.0软硬件架构
6.4.9 中间件和生态软件包
6.4.10 M-box ADAS域控制器在新宝骏E300上量产
6.4.11 东软睿驰基础软件平台产品NeuSAR2.0
6.4.12 东软睿驰通用域控制器GPDC
6.5 诺博汽车科技
6.5.1 诺博汽车科技智能座舱业务定位
6.5.2 诺博汽车科技座舱域控制器产品发展路线图
6.5.3 诺博汽车科技 IN7.0 座舱域控制器(基于高通6155)
6.5.4 诺博汽车科技 IN9.0 座舱域控制器(基于高通8155)
6.5.5 诺博汽车科技座舱域控制器软件方案
6.5.6 诺博汽车科技规划了三步走的发展战略
6.6 华阳集团
6.6.1 华阳第四代智能座舱域控制器
6.6.2 华阳发布座舱域控制器及新一代智能座舱解决方案
6.6.3 华阳AAOP2.0座舱开放平台的分层分列技术框架
6.6.4 华阳AAOP2.0座舱开放平台从信息娱乐到智能座舱一体化
6.6.5 华阳AAOP2.0座舱开放平台特点(1)
6.6.6 华阳AAOP2.0座舱开放平台特点(2)
6.6.7 华阳AAOP2.0座舱开放平台特点(3)
6.6.8 华阳AAOP2.0座舱开放平台特点(4)
6.6.9 华阳AAOP2.0座舱开放平台特点(5)
6.7 福瑞泰克
6.7.1 福瑞泰克自动驾驶产品路线图
6.7.2 福瑞泰克自动驾驶系统解决方案(1)
6.7.3 福瑞泰克自动驾驶系统解决方案(2)
6.7.4 福瑞泰克域控系统产品路线图
6.7.5 福瑞泰克域控制器:ADC20技术架构
6.7.6 福瑞泰克域控制器:ADC30产品架构
6.8 创时智驾
6.8.1 创时智驾可为客户提供域控制器硬件和软件平台
6.8.2 创时智驾iECU控制器 MotionWise 软件平台
6.8.3 创时智驾iECU的典型客户应用
6.8.4 创时智驾域控制器产品组合
6.8.5 创时智驾域控制器软件平台
6.9 英博超算
6.9.1 英博超算公司介绍
6.9.2 英博超算L2.99智能驾驶域控制器:在奇瑞大蚂蚁上量产搭载
6.9.3 英博超算L2.99智能驾驶域控制器:技术优势
6.9.4 英博超算L2.99智能驾驶域控制器:硬件架构
6.9.5 英博超算L2.99智能驾驶域控制器:规格参数和接口能力
6.9.6 英博软件定义ADAS一体机
6.9.7 英博超算双J3智能驾驶域控制器
6.9.8 英博超算智能驾驶域控制器合作模式
6.10 百度
6.10.1 百度自动驾驶计算平台 ACU (四喜)
6.10.2 百度自动驾驶计算平台 Roadmap
6.10.3 百度自动驾驶计算平台1.0(五仁)/2.0(四喜)/3.0(三鲜)产品技术特性
6.10.4 百度自动驾驶计算平台 ACU(四喜)选用TI TDA4处理器
6.10.5 百度Apollo 主推ANP+AVP 全域智驾系统
6.11 环宇智行
6.11.1 环宇智行介绍
6.11.2 环宇智行商业模式和核心业务组成
6.11.3 环宇智行自动驾驶域控制器迭代和降本路径
6.11.4 环宇智行自动驾驶域控制器: TITAN 4
6.11.5 环宇智行自动驾驶域控制器: TITAN 3
6.11.6 环宇智行自动驾驶域控制器: TITAN 3技术参数和架构
6.11.7 环宇智行自动驾驶域控制器: TITAN 3系统框架图
6.11.8 环宇智行自动驾驶域控制器: TITAN 3性能指标
6.11.9 环宇智行自动驾驶软件平台: Athena
6.11.10 环宇智行与华为合作
6.12 经纬恒润
6.12.1 经纬恒润公司介绍
6.12.2 经纬恒润ADAS域控制器
6.12.3 经纬恒润ADAS域控制器性能特征
6.13 宏景智驾
6.13.1 宏景智驾公司介绍
6.13.2 宏景智驾自动驾驶域控制器:ADCU
6.13.3 宏景智驾“双子星Gemini”计算平台和自动驾驶全栈技术能力
6.13.4 宏景智驾宏景智驾自动驾驶系统架构
6.13.5 宏景智驾与江淮成立合资公司域驰智能
6.14 航盛电子
6.14.1 航盛电子产品布局
6.14.2 航盛电子智能驾驶舱生态系统
6.14.3 航盛电子智能驾驶舱快速迭代能力
6.14.4 航盛电子智能驾驶舱客户:与东风启辰、恩智浦合作量产智能驾驶舱
6.15 北斗星通智联
6.15.1 北斗星通智联科技简介
6.15.2 智能座舱域控制器
6.16 联合汽车电子
6.16.1 联合汽车电子扩展型域控制器平台XCU
6.16.2 联合汽车电子基于AUTOSAR的开放软件平台
6.16.3 联合汽车电子新EEA下的SOA架构应用
6.16.4 联合汽车的区域控制器架构
6.16.5 联合汽车电子区控制器功能单元:区域供电中心
6.17 布谷鸟
6.17.1 布谷鸟汽车座舱和智能驾驶计算平台架构
6.17.2 布谷鸟座舱和智能驾驶产品线
6.17.3 布谷鸟智能座舱产品路线
6.17.4 布谷鸟智能座舱产品
6.17.5 布谷鸟智能座舱域控制器:ACU202智能座舱计算平台
6.17.6 布谷鸟智能座舱AutoCabin
6.17.7 布谷鸟智能座舱软件:CarNetOS
6.17.8 布谷鸟AutoWheel-L2.5·智能驾驶系统解决方案
6.17.9 布谷鸟ACU202·智能座舱计算平台(域控制器)
6.17.10 布谷鸟AWU401 自动驾驶计算单元
6.17.11 布谷鸟AWU401 软件平台
6.18 优控智行
6.18.1 优控智行公司介绍
6.18.2 优控智行智能驾驶产品
6.18.3 优控智行ACU硬件平台
6.18.4 优控智行ACU硬件平台
6.18.5 优控智行自动驾驶域控制器用于美团无人配送车
6.18.6 优控智行自动驾驶域控制器用于宇通L4级自动驾驶巴士
6.18.7 优控智行域控制器EAXVA03
6.18.8 优控智行软件平台架构
6.19 智行者
6.19.1 智行者AVOS软件操作系统和AVCU硬件控制平台
6.19.2 智行者AVOS软件系统架构
6.19.3 智行者BrainBox (NVIDIA Xavier版本)
6.19.4 智行者BrainBox(NVIDIA TX2版本)
6.19.5 智行者SenseBox(NVIDIA Xavier版本)
6.19.6 智行者SenseBox(NVIDIA TX2版本)
6.19.7 智行者BrainBox_ Intel i7版本
6.20 大疆车载
6.20.1 大疆车载智能驾驶方案
6.20.2 大疆自研自动驾驶域控制器产品
6.20.3 大疆自研自动驾驶域控制器中间件
6.21 映驰科技
6.21.1 映驰科技技术和产品
6.21.2 映驰科技生态建设
6.21.3 映驰科技高性能计算软件平台:EMOS1.0
6.21.4 映驰科技高性能计算软件平台:EMOS1.0技术特点
6.21.5 映驰科技高性能计算软件平台:多域融合软件平台
6.21.6 映驰科技多域融合计算平台
6.21.7 映驰科技业务模式
6.22 超星未来
6.22.1 北京超星未来企业介绍
6.22.2 超星未来NOVA-Box计算平台解决方案(1)
6.22.3 超星未来NOVA-Box计算平台解决方案(2)
6.22.4 超星未来NOVA-Box计算平台解决方案(3)
6.22.5 超星未来合作伙伴