突围高阶智能驾驶,行泊一体放量指日可待
据佐思汽研统计,2022年1-4月中国乘用车L2+装配量为177.27万辆,同比增长48.6%;装配率从2022年1月的27.6%增长至2022年4月的35.4%,增长7.8个百分点。
2022年1-4月中国乘用车L2+装配量及装配率统计
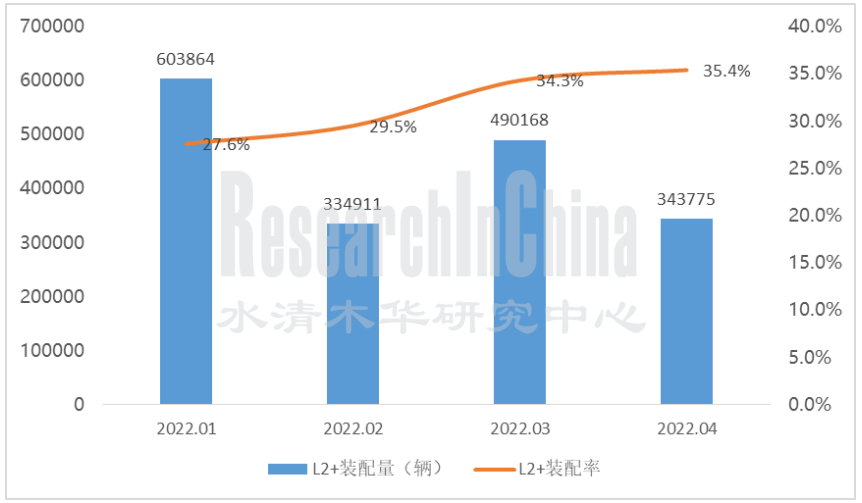
注:L2+包含L2、L2.5和L2.9的装配量总和
来源:佐思汽研
在L2+智能驾驶技术普及的背景下,消费者对更高阶智能驾驶功能的体验需求也随之增长,如何以低成本高性能实现高阶自动驾驶功能的落地成为了迫切需要,行泊一体因而应运而生。
行泊一体是指将行车和泊车两个SoC的功能合并在一个SoC里,能同时实现高速行车辅助与低速泊车辅助的方案,具备硬件成本低、软件配置灵活、功能迭代开发效率高的特点。
相较于过去分离式行车、泊车功能开发的模式,行泊一体方案可以实现传感器硬件复用,节省开发成本,使得高阶智能驾驶功能(如自动变道、上下匝道、记忆泊车、代客泊车等)在中低端车型上实现。
行泊一体方案将下沉中低端车型,放量市场
目前,行泊一体上车主要车型有小鹏P7/P5、理想L9、坦克500、智己L7、荣威RX5、宝骏e300/Plus、吉利星越L、燃油车江淮思皓QX NOP版等。此外,威马和摩卡计划今年实现行泊一体方案上车,比亚迪规划2023年实现搭载地平线征程5的行泊一体方案上车 。
就多数行泊一体方案来看,目前主要是国内厂商占据主导地位,比如福瑞泰克、东软睿驰、易航等。
福瑞泰克推出的基于ADC 域控制器平台的高阶自动驾驶解决方案,包含ADC20(支持L2.9)、ADC25(支持城区场景)、ADC30(支持L3-L4)三个版本,满足L2-L4不同级别的产品需求,能够支持高速场景下的上下匝道、自动变道、城市道路的堵车自动跟车、低速场景下的自动泊车等功能。
福瑞泰克基于行泊一体域控制器的高阶自动驾驶解决方案

来源:福瑞泰克
福瑞泰克最新一代域控制器ADC20平台方案采用独创的架构既可支持行泊一体,也可实现NOA高速公路导航辅助驾驶。融合方案利用硬件预埋、数据优化和 OTA,实现功能和性能持续成长,系统控制更拟人化。该方案将于2022年下半年面向乘用车客户进行规模化量产交付,并可通过OTA持续实现功能升级。
此外,预计2023量产的基于ADC30域控制器平台的高阶自动驾驶解决方案AI算力最高支持500+Tops,该方案结合了高精地图和定位导航,行车最高可实现L3高速代驾HWP、拥堵自行TJP及自动导航行驶NOP功能,泊车最高可实现L4记忆泊车HPA及代客泊车AVP功能,满足ISO 26262功能安全ASIL D等级要求,已成功定点一汽红旗。
图:福瑞泰克行泊一体域控制器ADC30
来源:福瑞泰克
东软睿驰于2022年推出的第四代自动驾驶域控制器X-Box是基于SDV开发模式下的全新L2+级别域控制器标准品。产品基于地平线征程5系列人工智能芯片,具备L2+级别行车与泊车功能,支持8M摄像头、4D点云毫米波雷达和激光雷达的接入,场景覆盖高速路、城市快速路、部分城市道路和多类停车场。
此外,X-Box采用SOA软件架构的设计方案,软件及算法按照模块化、服务化开发;支持数据闭环机制下的端云协同自动驾驶;支持全新一代整车E/E架构,可实现域内、跨域的服务订阅与发现,软件灵活部署与应用层的快速迭代,以及系统架构开放、多维度全栈软件能力开放和联合开发等功能。
安全性方面,X-Box的安全性设计按照ISO 26262和ISO 21434对功能安全和信息安全进行开发,对行车典型场景和泊车典型场景实施了最小风险策略,对车端、云端、手机端的网联系统实施了安全启动、安全存储、安全升级、安全通信等模块的部署。
东软睿驰第四代自动驾驶域控制器X-Box

来源:东软睿驰
2022年5月,易航智能宣布低至万元的NOA行泊一体方案量产上市,用16TOPS算力实现了NOA行泊一体功能落地,其特点在于:
•包含16项行车功能(如自动超车、自动上下匝道、自动路网切换等)和10项泊车功能(如1000米记忆泊车和融合泊车等);
•通过5R11V+12USS丰富配置以及先进的融合感知算法,带来了厘米级的控制精度;
•NOA模式下的并线策略、制动力度等的把控甚至超过“老司机”。
•整体方案覆盖15万元级车型。
同时,易航智能可以根据需求提供单/双TDA4等多种配置方案,其中单TDA4方案可取代L2级ADAS功能,在成本持平的前提下实现更高阶的辅助驾驶功能。双TDA4方案目前已在江铃、雷诺、威马和上汽大通等品牌上实现量产。未来,易航智能将推出城市全场景FSD方案,预计今年年底量产。
易航智能NOA行泊一体方案覆盖15万元以内车型
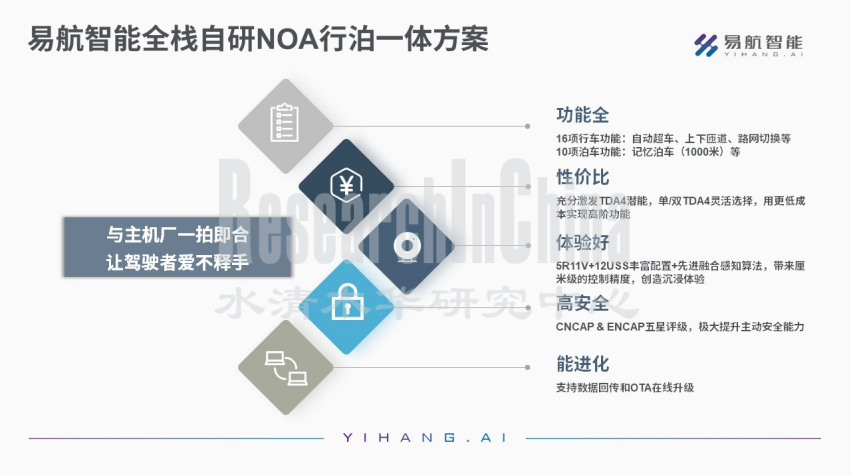
来源:易航智能
易航智能产品路线图

来源:易航智能
行泊一体驾驶域将与座舱域实现跨域融合
随着汽车电子电气架构由分布式向集中式演进,大算力芯片上车,部分域控功能的整合已经可以实现,比如 VCU 控制、BCM 车身控制、部分网关功能的集成等,甚至实现驾驶域、座舱域和车身域的三域融合。
跨域融合行泊一体方案
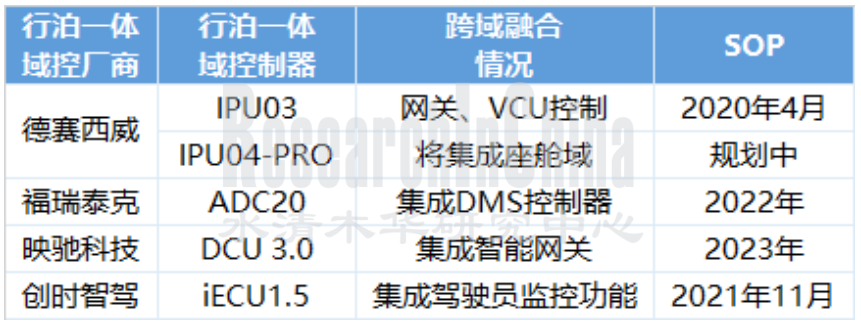
来源:佐思汽研
德赛西威的IPU03集成了网关和VCU控制,并计划在其下一代行泊一体域控制器IPU04-PRO中实现自动驾驶域与座舱域的集成。
福瑞泰克ADC20行泊一体域控产品集成了行车域控制器、泊车域控制器和DMS控制器。支持800万像素前视摄像头,环视freespace算法检测可通行区域,配合高精度地图和定位、后视相机,最高实现高速公路导航辅助驾驶和AVP泊车功能,目前已定点某国内一线主机厂,预计今年量产,后续可通过OTA升级。
福瑞泰克行泊一体域控制器ADC20
来源:福瑞泰克
未来,随着汽车EEA架构与SOA架构的演变,中心化域控制器及跨域控制器将向车载中央电脑和智能区域控制器发展,最终实现车-云计算。因此,中央域控制器将配置集成度更高、算力更强的计算平台,进而支撑更复杂的传感器数据融合算法,实现更高级别的自动驾驶。
全栈自研+数据驱动,加速行泊一体方案落地
在量产阶段,自动驾驶系统中的软硬件高度耦合,全栈自研可以更好地分析研发过程中出现的技术问题,满足车企的定制化需求。另外,采集大量真实场景的运行数据,可以驱动自动驾驶数据及技术迭代,形成价值闭环。因此,行泊一体供应商纷纷采用全栈自研+数据驱动的方式,加速其方案落地。
行泊一体供应商全栈自研+数据驱动布局情况
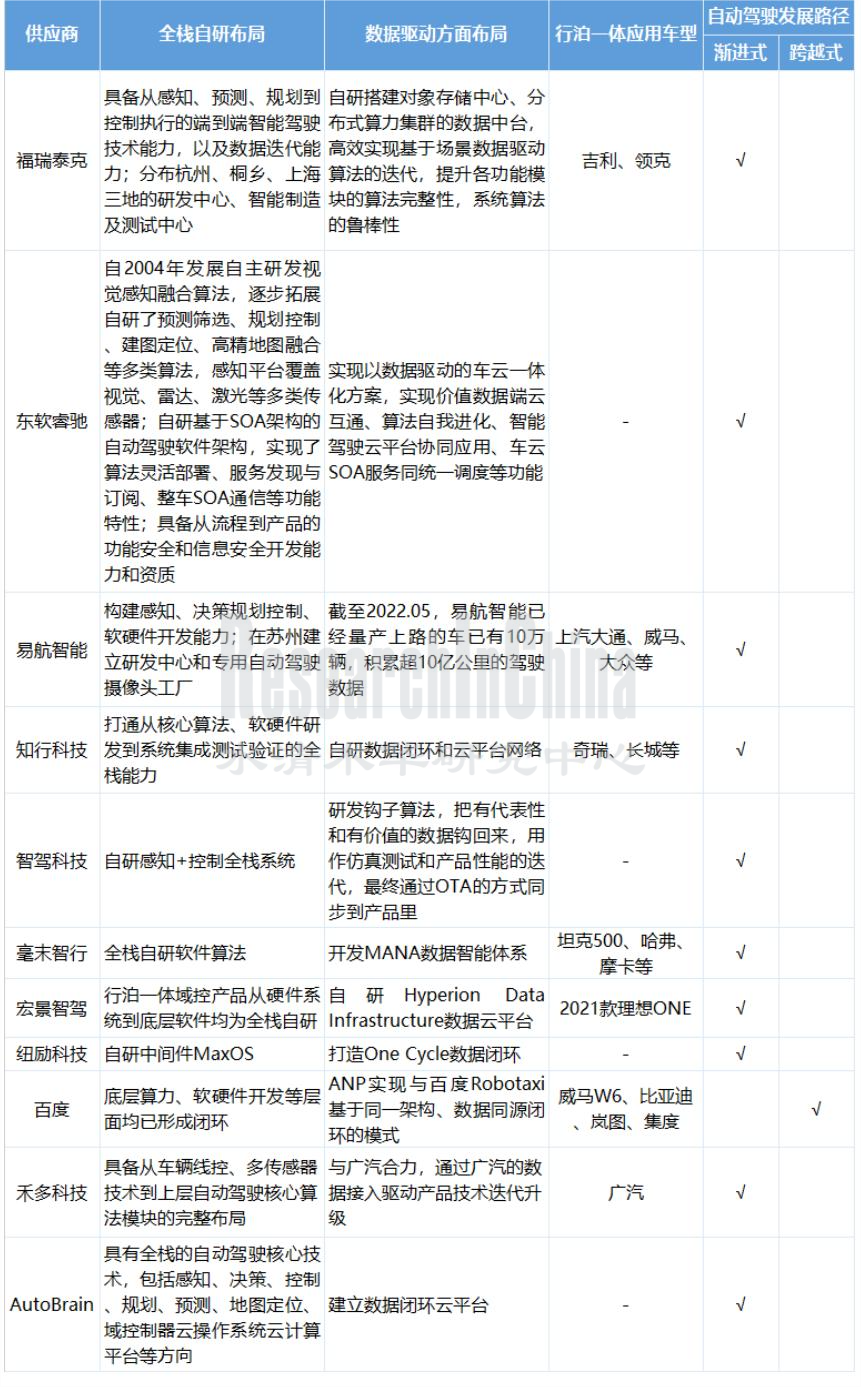
来源:佐思汽研
比如,知行科技自研的行泊一体域控制器IDC,可提供L2+智能驾驶体验。硬件设计方面,支持ISO 26262 ASIL-B(D)功能安全等级,支持扩展大算力平台的持续迭代升级。软件架构方面,提供基于面向SOA化的软件架构,预置了基础软件、标准的中间件和多样的开发工具,部署分层式的软件架构,可实现软硬件的高效解耦。
在数据闭环方面,知行科技推出了一套数据闭环系统,可以收集大量的数据,回传至云平台,完善功能算法,持续迭代产品,不断保障导航辅助驾驶的安全性。
其自研的数据闭环和云平台网络采用原生云架构的设计方式,具有可扩展性,可实现与国家中心云平台的互通互联,使得搭载知行科技解决方案的车辆数据可追溯、可监控。
该方案计划2022年第三季度交付,已获奇瑞、轻橙等车型量产定点。
知行科技大数据闭环系统驱动全场景落地
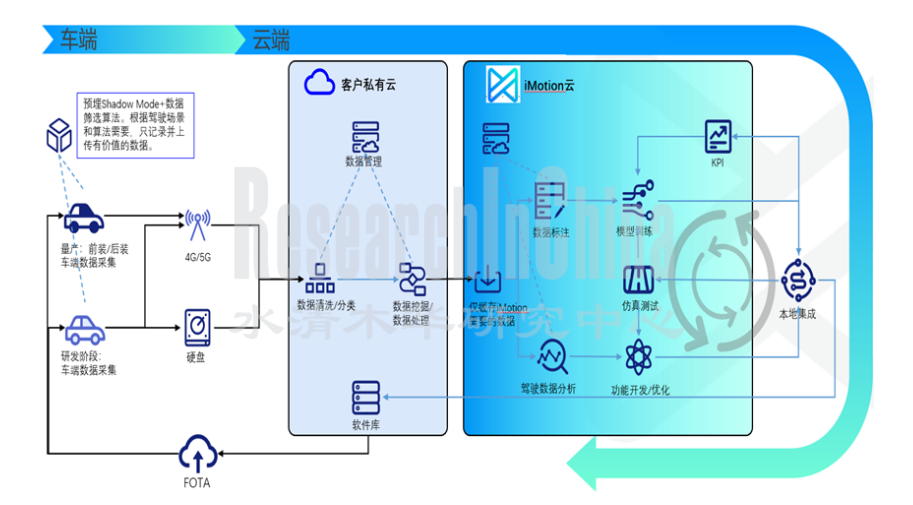
来源:知行科技
1. 行泊一体简介
1.1 行泊一体的定义及影响
1.2 行泊一体发展原因
1.2.1 行泊一体发展原因一
1.2.2 行泊一体发展原因二
1.2.3 行泊一体发展原因三
1.3 行泊一体方案的特点
1.4 行泊一体应用场景
1.4.1 行泊一体应用场景分类
1.4.2 行泊一体应用场景-端到端全场景智能驾驶
1.5 行泊一体发展趋势
1.5.1 行泊一体发展趋势一
1.5.2 行泊一体发展趋势二
1.5.3 行泊一体发展趋势三
1.5.4 行泊一体发展趋势四
2. 行泊一体域控供应商
2.1 行泊一体域控供应商汇总分析
2.2 东软睿驰
2.2.1 公司简介
2.2.2 产品阵容
2.2.3 第四代自动驾驶域控制器X-Box
2.2.4 行泊一体域控制器产品软件架构
2.2.5 合作动态
2.3 德赛西威
2.3.1 公司简介
2.3.2 产品阵容
2.3.3 行泊一体域控制器IPU03
2.3.4 行泊一体域控制器IPU04
2.3.5 合作模式及动态
2.4 福瑞泰克
2.4.1 公司简介
2.4.2 产品阵容
2.4.3 行泊一体域控制器产品路线图
2.4.4 行泊一体域控制器ADC20
2.4.5 基于ADC20的行泊一体化方案
2.4.6 基于ADC25的行泊一体化方案
2.4.7 基于ADC30的行泊一体化方案
2.4.8 ADC30系统OTA升级能力
2.4.9 行泊一体域控制器量产策略
2.4.10 智能领航辅助系统NOA
2.5 映驰科技
2.5.1 公司简介
2.5.2 产品阵容
2.5.3 行泊一体域控制器DCU 3.0
2.5.4 DCU 3.0搭载映驰计算软件平台EMOS
2.5.5 未来规划、合作模式及动态
2.6 知行科技
2.6.1 公司简介
2.6.2 产品阵容
2.6.3 行泊一体域控制器IDC简介
2.6.4 行泊一体域控制器IDC MID功能特点:行车方面
2.6.5 行泊一体域控制器IDC MID功能特点:泊车方面
2.6.6 实现全场景自动驾驶的技术策略
2.6.7 大数据闭环系统驱动全场景落地
2.6.8 合作案例
2.7 创时智驾
2.7.1 公司简介
2.7.2 发展历程及发展方向
2.7.3 产品阵容
2.7.4 行泊一体域控制器iECU 1.5
2.7.5 行泊一体域控制器iECU 3.1
2.7.6 行泊一体域控制器软件平台
2.7.7 合作模式及动态
2.8 魔视智能
2.8.1 公司简介
2.8.2 产品阵容
2.8.3 行泊一体域控制器Magic Pilot (CE)及合作动态
2.8.4 量产路线图
3. 行泊一体芯片供应商
3.1 行泊一体芯片供应商汇总分析
3.2 黑芝麻智能
3.2.1 公司简介
3.2.2 行泊一体芯片产品路线图
3.2.3 行泊一体芯片华山二号A1000L
3.2.4 行泊一体芯片华山二号A1000
3.2.5 行泊一体芯片华山二号A1000 Pro
3.2.6 基于行泊一体芯片的全自动驾驶计算平台
3.2.7 行泊一体芯片软件架构体系
3.2.8 合作动态
3.3 地平线
3.3.1 公司简介
3.3.2 融资情况
3.3.3 产品阵容
3.3.4 行泊一体芯片产品路线图
3.3.5 基于行泊一体芯片的智能驾驶解决方案产品矩阵
3.3.6 基于征程3的智能驾驶解决方案
3.3.7 基于征程3的智能驾驶解决方案应用案例
3.3.8 行泊一体芯片征程3
3.3.9 行泊一体芯片征程5
3.3.10 最近动态
3.4 德州仪器
3.4.1 公司简介
3.4.2 产品阵容
3.4.3 行泊一体芯片TDA4VM
3.4.4 最近动态
3.5 恩智浦
3.5.1 公司简介
3.5.2 产品阵容
3.5.3 行泊一体芯片S32V
3.6 英伟达
3.6.1 公司简介
3.6.2 行泊一体域控芯片产品对比
3.6.3 行泊一体芯片Orin
3.6.4 Orin系统架构
3.6.5 行泊一体芯片Atlan
4. 行泊一体智能驾驶方案厂商
4.1 行泊一体智能驾驶方案厂商汇总分析
4.2 智驾科技 MAXIEYE
4.2.1 公司简介
4.2.2 产品阵容
4.2.3 智能驾驶系统产品MAXIPILOT 2.0版本对比
4.2.4 MAXIPILOT基于BEV架构搭建
4.2.5 行泊一体解决方案
4.2.6 商业化战略
4.2.7 合作动态
4.3 毫末智行
4.3.1 公司简介
4.3.2 产品阵容及“小魔盒”产品路线图
4.3.3 乘用车智能驾驶产品路线图
4.3.4 行泊一体智能驾驶系统HPilot3.0
4.3.5 HPilot3.0红绿灯识别及车道线识别能力
4.3.6 MANA数据智能体系助力HPilot自动驾驶能力迭代
4.3.7 毫末智行发展战略及合作模式
4.3.8 合作动态
4.4 易航智能
4.4.1 公司简介
4.4.2 乘用车自动驾驶方案路线图
4.4.3 全栈自研NOA行泊一体方案
4.4.4 NOA行泊一体算法模型
4.4.5 全场景自动驾驶FSD及商业&合作模式
4.4.6 合作案例
4.5 宏景智驾
4.5.1 公司简介
4.5.2 业务布局
4.5.3 宏景智驾域控制器产品
4.5.4 行泊一体智能领航整体解决方案
4.5.5 商业化量产战略
4.5.6 合作动态
4.6 纽励科技
4.6.1 公司简介
4.6.2 产品阵容
4.6.3 行泊一体智能驾驶解决方案简介
4.6.4 行泊一体方案采用全自研中间件MaxOS
4.6.5 行泊一体方案数据闭环能力
4.6.6 合作动态
4.7 百度
4.7.1 公司简介
4.7.2 百度行泊一体硬件平台
4.7.3 百度行泊一体智能驾驶解决方案ANP原型
4.7.4 百度行泊一体智能驾驶解决方案ANP特点
4.7.5 百度行泊一体智能驾驶解决方案ANP版本对比
4.7.6 行泊一体智能驾驶解决方案ANP3.0
4.7.7 最近动态
4.8 纵目科技
4.8.1 公司简介
4.8.2 产品阵容
4.8.3 发展规划
4.8.4 行泊一体合作动态
4.9 禾多科技
4.9.1 公司简介
4.9.2 产品阵容
4.9.3 行泊一体布局及未来规划
4.9.4 合作模式及动态
4.10 AutoBrain
4.10.1 公司简介
4.10.2 产品阵容
4.10.3 业务形式及行泊一体合作动态
4.11 未动科技
4.11.1 公司简介
4.11.2 产品阵容
4.11.3 未动科技行泊一体智能驾驶方案简介及合作
4.11.4 合作动态
5. 主要主机厂行泊一体方案
5.1 主机厂行泊一体方案汇总分析
5.2 长城坦克500简介
5.2.1 长城坦克500行泊一体功能例举:智慧巡航
5.2.2 长城坦克500行泊一体功能例举:智能泊车
5.3 小鹏P5简介
5.3.1 小鹏P5行泊一体功能例举:高速NGP和城市NGP
5.3.2 小鹏P5行泊一体功能例举:跨楼层泊车
5.4 理想L9简介
5.4.1 理想L9行泊一体功能例举:NOA高速导航辅助驾驶
5.5 新宝骏E300Plus简介
5.5.1 新宝骏E300Plus行泊一体功能例举
5.6 上汽荣威RX5 MAX简介
5.6.1 RX5 MAX行泊一体功能例举
5.7 智己L7简介
5.7.1 智己L7行泊一体功能例举
5.8 江淮思皓QX NOP版简介及行泊一体功能例举