多种技术路线并行,转镜和Flash是前装量产中采用最多的方案
激光雷达技术路线包括机械式、MEMS、转镜/棱镜、OPA、Flash等。从整体来看,大方向是从机械式到固态演变,同时多种技术路线并行存在(如Velodyne从2017年法兰克福车展首秀Velarray开始,就已着手机械式与固态两条路线齐头并进)。Flash是在国外厂商布局中采用最多的方案,其次是FMCW和MEMS。
国外激光雷达厂商技术路线布局
来源:《2022年激光雷达产业研究报告-国外篇》
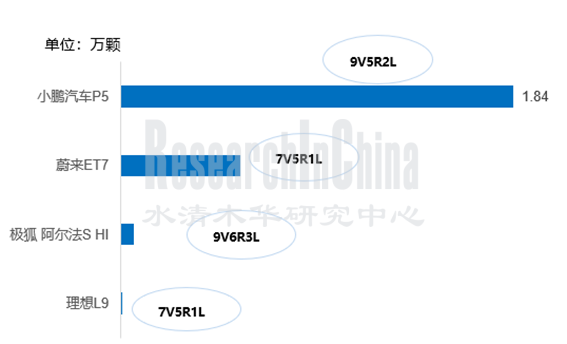
就前装量产情况来看,转镜和Flash是被采用最多的方案。其中,转镜方案代表厂商为法雷奥,其激光雷达在德国巴伐利亚法雷奥维姆丁工厂生产。截至2021年,其SCALA激光雷达出货量已超16万颗,单颗低于1000 美元。Flash激光雷达代表厂商为Ibeo,其ibeoNEXT激光雷达由采埃孚负责生产,探测距离可达250米以上,水平角分辨率可达0.04°,垂直角分辨率为 0.07°,可识别防撞护栏与道路标识,汽车、自行车和行人,以及它们各自的位置和移动方向,已搭载至长城WEY摩卡车型上。
国外车载激光雷达前装量产情况

来源:《2022年激光雷达产业研究报告-国外篇》
感知算法成为激光雷达厂商重点布局方向
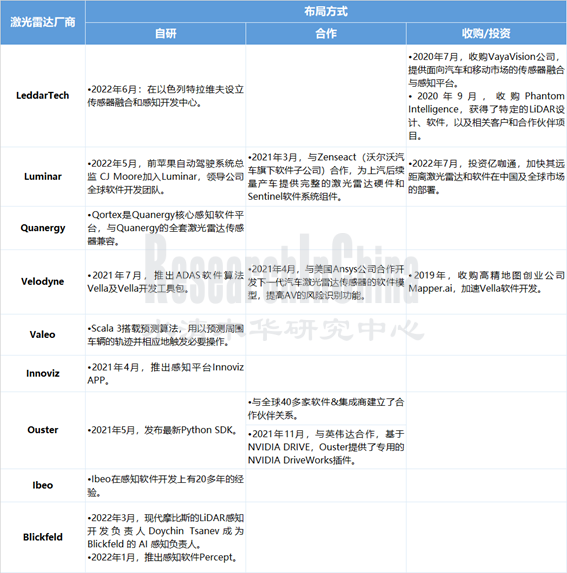
感知算法优劣决定了感知准确度和感知距离。因此激光雷达厂商除了在自身硬件上持续升级外,还逐步发展感知软件能力,从而实现感知回流融合闭环和系统级供应能力。国外激光雷达厂商在感知算法布局方式上,主要通过自研、收购和与软件公司合作。
国外车载激光雷达厂商感知软件布局
来源:《2022年激光雷达产业研究报告-国外篇》
其中LeddarTech主要通过收购方式进行布局。公司于2020年先后收购了传感器融合与感知软件企业VayaVision和Phantom Intelligence。LeddarTech 基于其全波形数字信号处理技术的开放平台,加上VayaVision 的原始数据传感器融合与感知软件堆栈,能够提供准确的环境模型,有助于实现大规模部署ADAS 和 AD 应用。通过对Phantom Intelligence的收购,LeddarTech获得了特定的LiDAR设计、软件,以及相关客户和合作伙伴项目。
Innoviz主要是自研感知算法。Innoviz于2021年4月推出嵌入式汽车感知平台“Innoviz APP”。Innoviz APP可在不超过250米的任何3D驾驶场景中准确检测和分类对象(包括汽车、卡车、摩托车、行人等等),还能实时执行感知算法,检测和分类与碰撞相关或非碰撞相关的像素。同时还可以作为嵌入式软件IP集成到芯片上。Innoviz的软件利用从Lidar获得的丰富数据,再加上专有的AI算法,可以提供良好的场景感知,以及自动升级的ASIL B(D)解决方案。
Innoviz感知软件可在不超过250米的3D场景中检测和分类汽车

来源:Innoviz
Luminar则是通过合作、投资和自研的方式进行布局。在合作方面,Luminar先是于2021年3月与沃尔沃子公司Zenseact合作,将后者的软件与自身硬件相结合,开发全堆栈的Sentinel自动驾驶解决方案。该方案核心功能包括主动规避危险的安全技术和无需干预、无需关注的高速公路自动驾驶技术。Sentinel方案包括Luminar公司的Iris激光雷达和感知软件,以及Zenseact公司的自动驾驶决策系统OnePilot。Luminar已于2021年完成Sentinel Alpha版本的开发,计划2022年完成beta版本。此外,Luminar还与上汽合作,为其后续量产车提供完整的激光雷达硬件与Sentinel软件系统组件。
Luminar在CES2022上展示Sentinel Alpha版本的主动安全和高速公路的自动驾驶力

来源:Luminar
芯片化发展是量产及降本重要方向
激光雷达内部有数百个分立器件,物料成本及光学装调的成本较高,高成本成了其量产上车的一大拦路虎。芯片化的激光雷达可将数百个分立器件集成于一颗芯片,有效缩小产品尺寸,是降低成本,推动量产的重要方向。
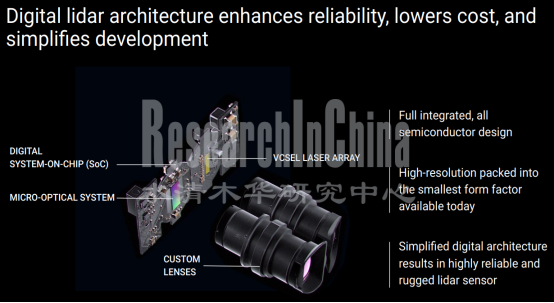
例如,Ouster所有的数字激光雷达均具有相同的核心架构。该架构包括了两块芯片和一个获得专利的微光学系统,取代了传统模拟激光雷达内部成百上千个分立元件,提升了可靠性,降低了价格(ES2量产价格为600美元,通过迭代价格将降至100美元)。
Ouster所有的数字激光雷达均具有相同的核心架构
来源:Ouster
如上图所示,在Ouster的激光雷达核心架构中,VCSEL激光器阵列将所有激光器集成到单个芯片上;定制SoC集成了灵敏的 SPAD 光子探测器和专有数字信号处理系统,可处理激光雷达的所有命令和控制逻辑;获得专利的微光学系统,可引导光线通过激光雷达,从而将探测器的效率提高多个数量级。
同样布局芯片化的还有Aeva,于2022年2月推出第二代FMCW芯片激光雷达Aeries II,采用LiDAR-on-Chip技术:将所有关键组件(包括发射器、接收器和光学器件)整合到单个紧凑模块中的硅光子上(无光纤设计),实现可靠、可扩展的生产,尺寸仅为上一代的四分之一,预计2023年量产。
Aeva LiDAR-on-Chip技术

来源:Aeva