随着ADAS和自动驾驶系统的功能开发及SOTIF预期功能开发周期日益缩短,车企竞速中新车型的推出离不开大量的测试。其中,仿真测试已被国内外车企广泛采用,理想状态下, 自动驾驶算法测试约80%~90% 通过仿真平台完成,9%~20% 在测试场完成,1% 通过实际路测完成。
一、仿真工具迭代速度加快,3D逼真可视化仿真不断提升测试置信度
随着宏观仿真、中观仿真、微观仿真工具技术的不断进步,尤其是微观仿真工具功能日趋丰富细腻化,对交通流仿真控制更加灵活,模拟复现道路环境及天气状况(涵盖极端天气如雨雪、浓雾、光线度等)和极端工况(事故触发等),以及针对各类传感器仿真(毫米波、激光雷达、摄像头等)设置的把控及场景变体的重构等。
各类仿真企业均加快其仿真软件的迭代速度,持续扩大验证corner case、长尾场景及难例,不断缩窄车企功能开发甚至预期功能开发中可能出现的各类异常场景,以可视化3D高逼真度结果输出,来验证车企不同模型及算法缺陷,持续提升车企对其仿真工具的信心度及置信度。
国外典型交通流仿真软件公司软件动态概览

来源:佐思汽研
• 仿真道路环境需要定义众多组件,比如道路(车道线、路面材质等)、交通标识、交通灯、交通参与者(机动车、非机动车、行人等)、道路周边元素(如绿化带、车站、建筑)以及天气条件(白天、夜晚、晴天、雨天等)。可以使用各种传感器模型和用户定义的传感器来检测这些对象。一般通过采集实际环境信息,结合已有的高精度地图构建静态场景,或者人为创建所需的环境元素。

• 场景仿真传感器,包括摄像头、激光雷达、毫米波雷达、超声波雷达,GPS/BDS、IMU、V2X等模块,其中摄像头仿真上,需模拟各种复杂的真实天气情况,自主调节天气,支持各种天气和光线条件下的摄像头仿真;激光雷达仿真,参照真实激光雷达的扫描方式,模拟每一条真实射线的发射,与场景中所有物体求交,生成真实的点云数据。

NI monoDrive仿真软件高保真传感器配置图例
部分国外传感器仿真公司产品特点

来源:佐思汽研
二、通过无限场景变体覆盖,实现ADAS/ADS数字化的全面测试验证
现实世界中的场景具有无限丰富、极其复杂、不可预测等特点,在虚拟环境中完全复现这些场景十分困难。如何利用有限的测试场景去映射出无限丰富的世界是实现自动驾驶有效测试验证的关键。基于场景库的仿真测试是解决自动驾驶路测数据匮乏的重要路线。场景库中的测试场景对现实世界的覆盖率越⾼,仿真测试结果的准确性就越⾼。
自动驾驶仿真领域,ASAM的OpenX标准得到了全球广泛的关注,其标准包括OpenDRIVE、OpenSCENARIO、OSI、OpenLABEL、OpenCRG五个部分,其中OpenDrive定义了静态场景的描述方法;OpenSCENARIO定义的内容主要涵盖动态场景描述,涵盖主车的位置与速度等信息及其他交通参与者的信息;OpenCRG主要聚焦道路表面的有关物理信息描述,主要用于轮胎和地面接触中与摩擦相关的问题。
仿真测试是为了模拟危险工况场景,包含大量恶劣气候环境、复杂道路交通以及典型交通事故等。参数重组场景是将已有仿真场景进行参数化设置,并完成仿真场景的随机生成或自动重组,具有无限性、扩展性、批量化、自动化等特点。参数重组场景的目的是补充自然驾驶场景、标准法规场景、危险工况场景等未覆盖的未知场景,有效覆盖自动驾驶功能测试盲区。
来自以色列的Foretellix在验证未覆盖的未知场景方面,采用特色的覆盖率驱动法(CDV),提供了一套测试验证平台Foretify(一方面,高度自动化地生成及调控数以百万计的测试向量以验证各式场景;另一方面,具有大数据分析能力的安全及生产效率显示面板展示可量化、可衡量的验证和测试的客观工作状态)。Foretify解决方案在开发的初期即可发现系统缺陷、边缘条件及未知领域,有助于防止由于设计缺陷(有些缺陷是致命的)而带来的高成本的召回,并能将场景移植到不同的地图和ODD上。目前其客户包括Denso、Valeo、NVIDIA、Mobileye、Volvo等。
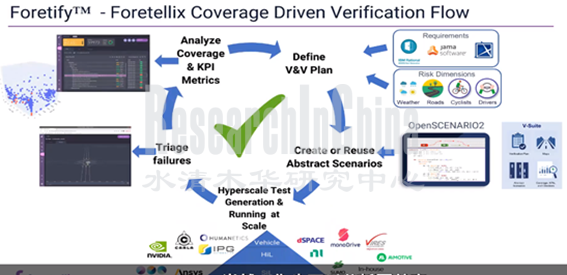
Foretify覆盖率驱动验证CDV流程
三、国外自动驾驶仿真企业持续扩大与国内企业合作,本土化服务稳步推进
国外自动驾驶仿真企业正在加大在中国市场的业务布局,比如德国PTV集团、法国ESI集团、以色列Cognata在中国建有子公司推进仿真业务拓展,其中PTV在中国90多个城市已覆盖600+客户;此外,还有NI、dSPACE、VI-grade等持续深化与国内车企及方案提供商的合作力度,比如国汽智控、速腾聚创等。
典型国外仿真企业与部分国内汽车行业企业的合作举例

来源:佐思汽研