随着自动驾驶的不断发展,对高精度定位技术的需求越来越大。同时在智能汽车硬件预埋的大趋势下,越来越多的乘用车选择加装高精度定位硬件,量产交付后可通过OTA升级实现更高级别功能。
高精度定位走向标配,供应商量产装车加速
从装车情况看,2022年以来上市的装配高精度定位技术的车型明显增多,其中蔚来、小鹏、理想、合众、华人运通、北汽极狐等在2022年新上车型均实现全系标配高精度定位,传统主机厂在这方面的部署也明显加快了脚步,如长城的坦克500、机甲龙,长安的深蓝SL03,上汽的飞凡R7、大通MAXUS G90,奇瑞的捷途大圣,凯迪拉克的LYRIQ锐歌等均推出了高精度定位的标配、选装等不同版本。据佐思汽研统计2022年1-10月份,中国量产乘用车高精度定位装车量已超28万辆,装配率在1.8%左右。
高精度定位尤其是满足L4/L5级别需求的厘米级高精度定位要实现大批量装车,首先需要通过高精度定位服务(如RTK/PPP-RTK)提高定位精度,同时还需要进一步降低成本,那对于高精定位供应商来说,实现核心软硬件自研可以显著降低成本。
• (1)定位基础服务技术
高精度定位硬件技术与RTK技术、或PPP-RTK技术融合使用可以有效提高定位精度,实现厘米级定位,满足自动驾驶不同等级的需求。目前国内厂商如千寻位置、六分科技、中国移动、北斗旗下的真点科技等都可以提供RTK或PPP-RTK等定位服务,助力主机厂自动驾驶发展。
六分科技:目前已经在中国自建了超2800个CORS基站,自研终端RTK算法与组合导航算法。同时在虚拟参考站和精密单点定位技术原理的基础上,自研“云阁”解算平台,计算各类空间误差,并通过自研终端RTK算法与终端组合导航算法,形成“网-云-端”一体化解决方案。该方案将能提供5系统16频点、全天候、实时厘米级高精度定位服务。六分科技高精度定位服务,可以做到从星到云到端的完好性监测+完好性输出。
近两年,六分科技已经收获包括威马、嬴彻科技、图森未来在内的多个智能驾驶量产订单, 并与东风悦享、仙途智能、滴滴青桔、英泰斯特、u-blox、中电昆辰等多个北斗上下游企业达成合作。
六分科技高精度定位服务框架
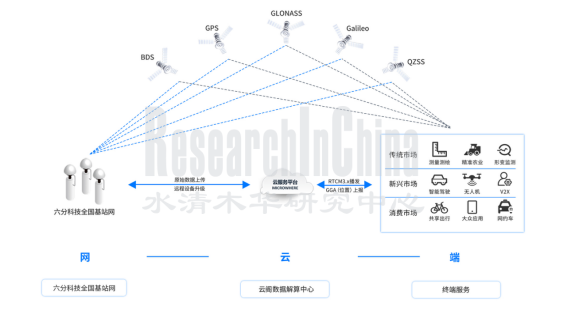
来源:六分科技
大有时空:2023年1月初正式推出PPP-RTK全球卫星定位服务产品,通过对基站数据进行综合处理,建立整网的电离层延迟、对流层延迟等误差模型,生成一套包含卫星轨道、钟差、电离层等的状态改正量,发送至车端进行位置解算,实现30秒快速收敛,定位精度可达2厘米。

来源:大有时空
PPP-RTK具备市场较大优势,可以解决定位结果输出的完好性问题:
1. 收敛时间短:利用地基参考网络提供的大气改正数和相位小数偏差产品,实现快速收敛;
2. 隐私性强:终端位置数据不用上传到运营商平台;
3. 覆盖面广:同时支持移动通信和卫星播发两种方式,可以相互弥补,实现全球定位覆盖;
4. 有效降低成本:通信带宽要求低,可采用卫星播发,其计算量和播发数据量,不随用户量增长而线性上升,此外对基站的需求量相对较少,可以有效减少相应的成本投入;
目前来看PPP-RTK技术可以有效解决成本和定位精度的问题,有望逐步成为主机厂智能驾驶方案中,实现高精度定位服务的首选技术。
• (2)定位硬件产品
在GNSS的国产化替代方面,国内的北云科技、华测导航、千寻位置、和芯星通等都实现了芯片或板卡的自研。
和芯星通:2022年7月推出的北斗高精度定位模组UM982是基于和芯星通自主研发的NebulasIV芯片设计的,实现RTK 定位及双天线定向解算。NebulasIV芯片把所有射频部分的信息处理、基带信号捕获跟踪、高精度厘米级算法、抗干扰算法等都集成到该芯片上,是射频基带及高精度算法一体化的GNSS SoC芯片,采用的是22纳米的生产工艺。
NebulasIV芯片架构
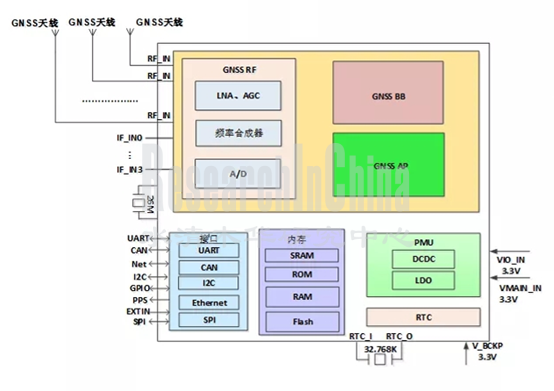
来源:和芯星通
在IMU的国产化方面,国内的戴世智能、导远电子、华依科技等都实现了IMU模块的量产,而IMU芯片方面还是由国外厂商占据主导地位。
高精度定位盒子(P-Box)已实现装车量产
量产乘用车高精度定位硬件,主要包括以下四类集成产品形态:(1)P-Box、Map-Box这类独立的定位盒子;(2)贴片式模组,将高精度定位集成到T-Box或域控制器中;(3) GNSS/IMU集成进T-Box(无线通讯模组);(4) GNSS/IMU模块分开部署在车内不同位置。
其中P-Box具备可以快速集成到车端的优势,成为大部分主机厂,尤其是传统主机厂实现高精度定位快速装车量产的最佳选择。
P-Box集成方式特点
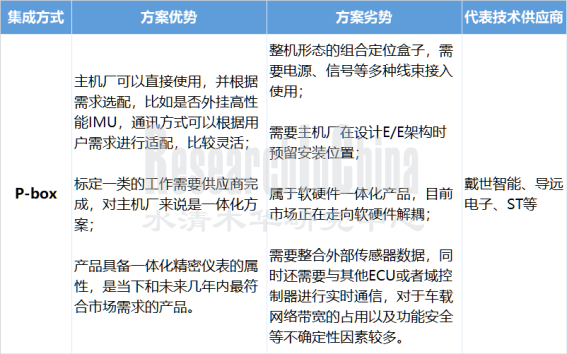
来源:佐思汽研《2023年高精度定位产业研究报告》
意法半导体:在2022年11月的慕尼黑华南电子展,ST展示了其P-Box产品,由ST多频多星座GNSS芯片(STA9100/STA8100)、定位引擎(STA1835)、IMU惯性传感器(ASM330LHB)和电源管理系统(LDO DC-DC L5965)构成,可实现车道级定位。
ST的P-Box方案满足ASIL- B功能安全要求,使用的GNSS芯片符合ASIL-B 标准,定位引擎、电源管理系统、IMU等都支持ASIL-B级别的汽车应用。
意法半导体的P-Box集成方案
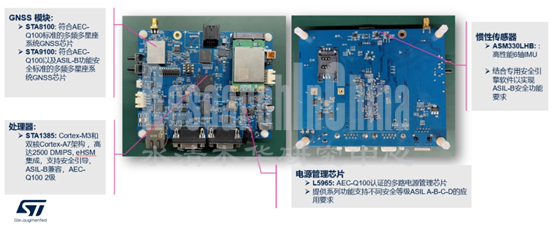
来源:ST
导远电子:专注于高精度定位产业,旗下高精度定位解决方案符合ISO 26262 汽车功能安全的要求。导远电子的P-Box融合了MEMS惯性导航技术、融合卫星导航(RTK-GNSS)和车辆信息(轮速、档位等),符合ISO 26262 ASIL B 。
2022年6月上市的理想L9,2022年7月上市的长安深蓝SL03都装配了导远电子的P-Box产品。此外,导远电子还获得了奇瑞定点项目。
E/E架构演进,推动贴片式定位模组发展
算法自研能力较强的主机厂开始探索将高精度定位集成到智驾域中,可以减少线束、接口的使用,为了迎合域集中和多域融合架构的发展趋势,供应商除了P-Box产品,也在积极部署贴片式高精度定位产品。目前北云科技、新纳传感、U-blox等均已推出了贴片式高精定位模组。
U-blox:ZED-F9K-01A高精度GNSS模块(AEC-Q104)是U-blox在2022年11月最新推出的产品,配备嵌入式软硬件和新一代IMU,可以提供全集成高精度定位解决方案。
ZED-F9K-01A原生支持U-blox PointPerfect GNSS增强服务,可以并行提供多路GNSS和IMU输出,为各种可能的架构提供支持,包括具有超低延迟、50Hz惯导位置输出。ZED-F9K-01A的工作温度最高可达105 ℃,设计限制更少,可方便集成到汽车ADAS域控制器或智能天线中。
来源:U-blox
佐思汽研《2023年高精度定位产业研究报告》主要研究内容如下:
• 高精度定位产业政策、市场规模、市场格局等研究;
• 高精度定位主要技术(包括GNSS、IMU、GNSS+RTK+IMU等)发展情况、供应商及产品总结等研究;
• 高精度定位主要技术发展趋势,包括车端集成方式、融合算法、PPP-RTK技术的应用研究;
• 高精度定位在主要应用场景(包括量产乘用车、无人配送、自动驾驶卡车等)的应用情况、细分市场规模的研究;
• 高精度定位基础服务供应商、定位模块供应商的主要技术、主要产品、竞争优势、合作情况等研究。