百度在自动驾驶领域的发展路径分为三条:Apollo平台、自动驾驶出行服务平台“萝卜快跑”、智能驾驶方案。
Apollo平台
2017年7月,百度宣布Apollo计划,并发布自动驾驶开源平台,2018年底正式开源Apollo车路协同方案,目前百度Apollo已在自动驾驶、智能汽车、智能交通三大领域拥有业内领先的解决方案。百度Apollo的汽车智能化解决方案已在31个汽车品牌的134个车型上实现量产,累计搭载超700万辆。
Apollo平台发展历程

来源:佐思汽研
2022年12月28日,百度Apollo平台面向所有开发者,正式推出Apollo 8.0,进一步夯实了平台的易用性,让开发者操作更简易上手。
Apollo 8.0架构

来源:百度Apollo
Robotaxi业务
截至2023年4月,百度Apollo测试总里程超过5000万公里,旗下出行品牌“萝卜快跑”在北京、上海、广州、深圳、重庆、武汉等城市开放常态化运营,预计到2025年将扩展到65个城市。
截至2022年7月,百度共发布了六代量产无人车产品,其中第六代产品Apollo RT6计划于2023年率先在萝卜快跑上投入使用。
萝卜快跑历代车型
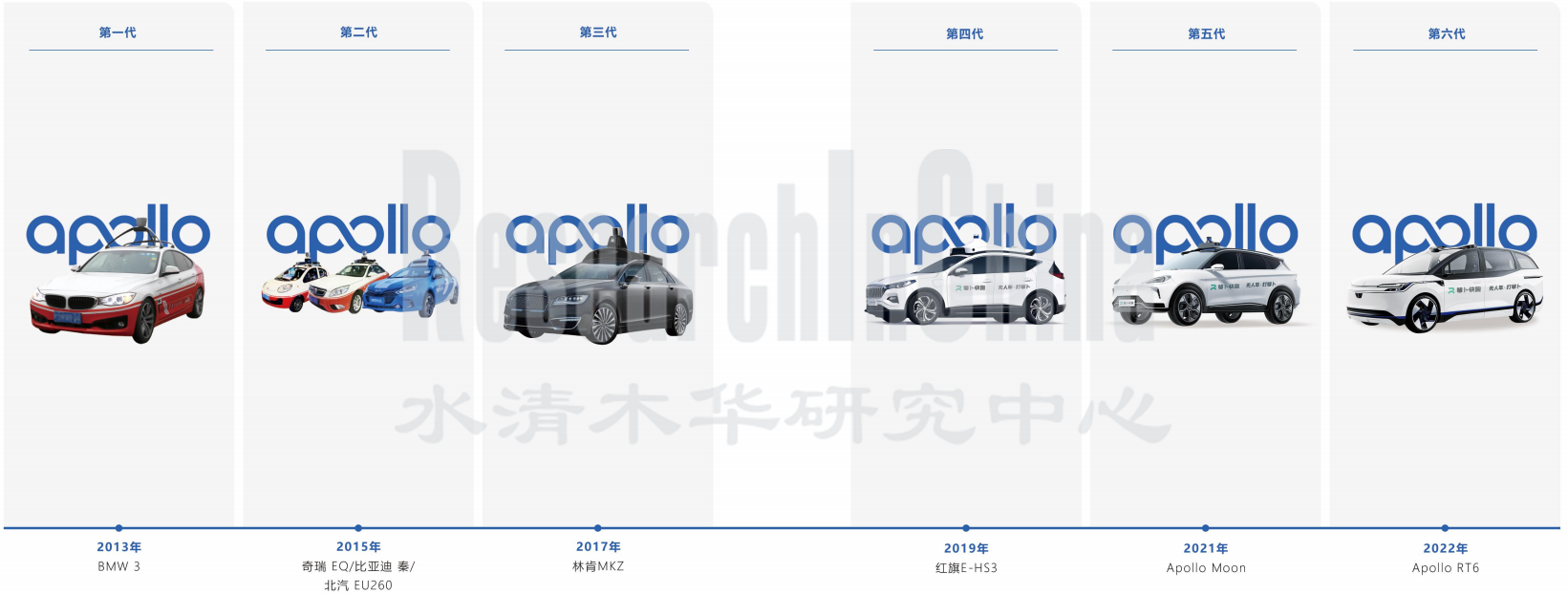
来源:百度
智能驾驶方案
百度的智能驾驶产品矩阵包括: Apollo City Driving Max、Apollo Highway Driving Pro、Apollo Parking、Apollo驾舱融通。

来源:百度
2023年4月,Apollo推出旗舰产品城市智驾Apollo City Driving Max,该系统使用的“轻量级高精地图”相比行业通用的传统高精地图要“轻”近80%,同时搭载两颗英伟达Orin X,算力达508TOPS,2颗视距为180米的高线束激光雷达,7个800万像素摄像头,4个300万像素环视摄像头,5个毫米波雷达,12个超声波传感器。
Apollo City Driving Max主要利用纯视觉实现城市域领航辅助驾驶。量产阶段,将增加激光雷达作为感知冗余。
在2023上海车展上登场的新款岚图FREE,则搭载了Apollo Highway Driving Pro,其中包含高速领航、城市驾驶辅助、全场景高效泊车等辅助驾驶功能,可以提供较为准确的环境感知和决策,实现自动泊车、自动跟车、自动变道等多种功能。
2023年,Apollo Highway Driving Pro完成了产品升级,其算力平台升级至单TDA4-VH平台。同时,百度也与黑芝麻达成合作,将Apollo Highway Driving Pro部署至华山二号A1000芯片平台。
Apollo 驾舱融通是百度的舱驾融合初代产品,采用高通8295座舱芯片(AI算力30TOPS,与英伟达Xavier 算力相当)来实现智能座舱+辅助驾驶功能。
域融合已成为2023年智驾行业的重要发展趋势。舱驾融合作为域融合的一部分,诸多ADAS公司开始布局。对于百度、华为、德赛西威等一线Tier1,本身在智驾、智舱领域均有产品线布局,开发舱驾融合方案相对容易。
对于多数只布局智驾或只布局智舱的企业,则需要通过强强联手,来实现舱驾融合。2023上海车展期间,斑马智行与禾多科技达成战略合作,共同开发舱驾一体解决方案,就是一个典型案例。
第一章 百度简介
1.1 公司简介
1.2 汽车业务动态
第二章 自动驾驶开放平台Apollo
2.1 Apollo简介
2.2 Apollo平台发展历程
2.3 Apollo业务布局
2.4 Apollo智能驾驶产品矩阵
2.4.1 Apollo City Driving Max
2.4.2 Apollo Highway Driving Pro
2.5 Apollo8.0
2.5.1 Apollo8.0模块结构
2.5.2 Apollo8.0感知框架
2.5.3 Apollo8.0工具链
2.6 Apollo仿真平台
2.6.1 Apollo仿真平台:架构
2.6.2 Apollo仿真平台:场景库
2.6.3 Apollo仿真平台:评估标准
2.7 行泊一体解决方案ANP
2.7.1 行泊一体解决方案ANP版本对比
2.7.2 ANP2.0特点
2.7.3 行泊一体解决方案ANP3.0
2.8 纯视觉解决方案 Apollo Lite
2.8.1 融合感知解决方案Apollo Lite++
2.9 自动驾驶感知1.0
2.9.1 感知1.0 主要算法
2.9.2 自动驾驶感知2.0
2.9.3 自动驾驶感知2.0-应用挑战
2.10 Apollo感知算法
2.10.1 Apollo感知算法——视觉算法
2.10.2 Apollo感知算法——红绿灯算法
2.10.3 Apollo感知算法——Radar、超声波算法
2.11 文心大模型
2.11.1 文心大模型简介
2.11.2 大模型应用-远视距视觉3D感知
2.11.3 大模型应用-多模态端到端感知
2.11.4 大模型应用-数据挖掘
2.12 Apollo Cloud
2.12.1 5G云代驾
2.12.2 5G云代驾解决方案
2.12.3 无人车云安全保障体系
2.12.4 驾云一体,数据闭环
第三章 智能驾驶域控制器
3.1 智能驾驶域控产品布局
3.2 智能驾驶域控对比
3.3 智能驾驶域控-“五仁”
3.4 智能驾驶域控-“四喜”
3.5 智能驾驶域控-“三鲜”
第四章 无人接驳
4.1 产品布局
4.2 Minibus
4.2.1 Minibus落地案例
4.3 Robobus
4.3.1 Robobus落地案例
4.3.2 Robobus运营情况
4.4 智慧站台产品解决方案
4.5 Robotaxi
4.5.1 Robotaxi 第六代无人车Apollo RT6
4.5.2 Robotaxi 城市分布
4.5.3 Robotaxi 发展现状及目标
4.5.4 Robotaxi 客户反馈
4.5.5 Robotaxi 发展历程
4.5.6 Robotaxi 合作车辆
4.5.7 Robotaxi 获得无人驾驶服务许可证
4.5.8 Robotaxi 百台无人车落地武汉
第五章 电子地图与定位业务
5.1 电子地图产品规划
5.1.1 电子地图产品体系
5.1.2 获得广州/深圳城市ADAS地图审图号
5.1.3 电子地图产品优势(1)
5.1.4 电子地图产品优势(2)
5.1.5 电子地图产品优势(3)
5.1.6 电子地图产品优势(4)
5.1.7 电子地图产品优势(5)
5.1.8 电子地图产品优势(6)
5.1.9 电子地图产品优势(7)
5.1.10 高精地图与智驾系统
5.1.11 人机共驾地图/泊车一体化SDK
5.2 组合定位技术方案
5.2.1 组合定位技术方案一
5.2.2 组合定位技术方案二
5.2.3 组合定位技术引擎
5.2.4 组合定位算法一
5.2.5 组合定位算法二
5.2.6 Apollo高精度定位技术演进
5.3 “车路云图”统筹发展
第六章 车路协同业务
6.1 车路协同 Apollo Air
6.2 车路协同开放平台“开路”
6.3 车路协同数据集
6.4 基于车路协同的智慧高速方案
6.5 V2X布局