车身电子功能的控制形式正随着汽车电子电气架构的演进而变化。从车门、后视镜、车窗、车灯等车身电子的分散控制,沿着车身控制模块BCM到车身域控制器BDC,最后发展为面向下一代中央集中式架构的区域控制器(VIU/ZCU)。
车身控制系统的演变过程

来源:汽车知识栈
车身控制功能的多种集成形式
1、车身域控制器:整合各类汽车电子功能
车身域控制器是以功能进行划分,一般集成BCM、PEPS、TPMS、Gateway等功能,对各个车身电子模块进行集中控制,统一管理各负载,对采集到的信息进行统一的分析、处理及分配系统资源。
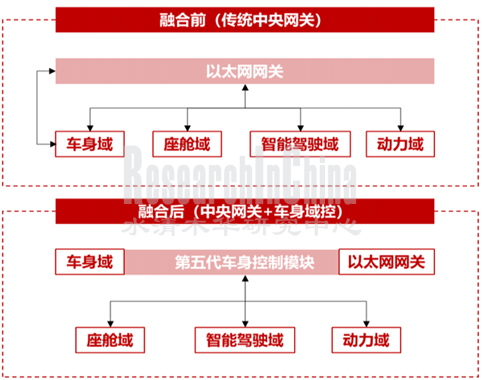
汽车E/E架构从域集中向中央计算演进的过程中, 垂直融合(将多个功能域的融合,或融合功能关联度较高的其他功能)的方案是一条必经之路。为进一步集中算力、提升通信传输速率,部分企业开始尝试将网关的功能向上集成到其它功能相对简单的领域,车身与以太网网关的融合成为了首选方案。
欧菲光的第五代车身域控制器BGM,将传统车身电子部分的BCM、以太网网关、空调控制器、门模块、电源管理等进行了集成整合,通过CAN、FlexRay、以太网与其他域控(如娱乐域、底盘域、动力域)实现信息快速交互,可适配L1至L2+智能驾驶平台。该产品已于2022年9月实现规模化量产,目前欧菲光是吉利博越L车身域控制器的独家供应商。
欧菲光BGM融合了车身域和网关
来源:欧菲光
大陆集团的第一代车身HPC也将之前单独运行的网关功能与车身控制器的功能相结合,变成了一个超级计算单元。该产品作为车载应用服务器(ICAS1,基于瑞萨R-Car M3),在大众汽车基于MEB平台的ID.3上实现量产。
2023年大陆集团在上海车展中首次展出了跨域的车辆控制高性能计算单元,除了集成原有的车身控制和整车网关功能外,还集成了底盘控制应用,如阻尼控制、自适应空气悬架和底盘调校等跨域整车控制功能。预计到2024年,大陆集团高性能计算单元将搭载在多家汽车厂商的30多个不同车型上。在国内,大陆集团目前拿到两个本土订单,该产品的首发量产车型就是广汽埃安旗下昊铂Hyper GT。
2、智能配电盒集成BCM功能
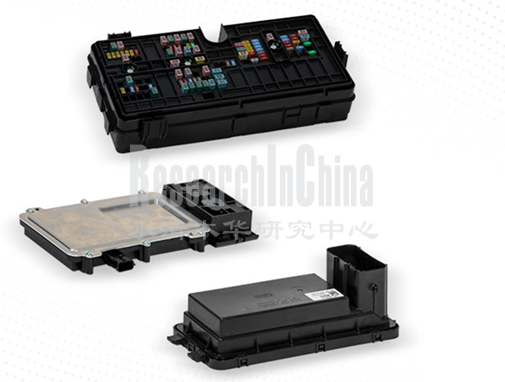
智能配电盒一般会将E-fuse和继电器组合的电气盒与车身控制器(BCM)集成在一个总的控制单元上,这样能够大大减少传统设计中BCM和配电盒之间大量的导线,也提升了整车电路的稳定性。智能配电盒的三大核心功能包括:电源分配功能、电源管理功能、车身控制功能。
特斯拉的智能配电方案完全取消了保险丝和继电器的组合,全部采用基于半导体技术的MOSFET和HSD芯片。配电盒也不再只是配电盒,既可以实现可控的配电功能,又能作为控制器来使用,实现了配电与控制的功能融合。
安波福的智能配电盒产品则是根据整车电子电气架构选择性集成部分BCM控制功能和低压负载。目前,安波福量产智能配电盒的方案主要集中在前舱(主要负责前部的各种大灯照明灯、雨刮、挡风玻璃预热、油泵电机等)和后舱(主要负责后部的各种大灯照明灯、儿童锁等)。
安波福低压智能配电盒
来源:安波福
3、中央集中式架构的区域控制器(VIU/ZCU)
区域控制器是以物理位置为优先级进行器件的分布与管理,根据就近原则接入全车的设备,对区域内的零部件进行电源分配及管理,平衡不同的输入输出控制等。
由铁将军与小鹏汽车联合推出的区域控制器Zone&VIU,基于小鹏X-EEA 3.0 架构。该款区域控制器可支持左/右域、支持底盘控制功能、支持AUTOSAR,符合功能安全标准ASIL-C等级,实现了以太网ETH模块+车身控制器的融合。目前已在小鹏G9中实现量产。
铁将军左/右区域控制器ZCU&VIU

来源:铁将军
经纬恒润在2023新品发布会中发布了物理区域控制单元(ZCU:Zonal Control Unit),集成了整车的配电功能(包括隔离开关,一级配电,二级配电)、区域网关路由功能(百兆以太网,CAN FD, LIN等)以及车身舒适域,新能源动力域,部分底盘域和空调热管理的输入输出信号采集控制等功能,计划2023年底实现量产交付。
车身(区)域控制器基于半导体的驱动控制方案
目前,车身(区)域控制器的配电方案主要是根据负载所需的驱动电流大小来选择,一般情况下,大电流负载偏向于使用驱动芯片+ MOSFET分立方案(在实际设计中30A以上的大电流应用以保险丝+继电器为主),小电流负载则选用HSD智能高边开关集成方案。
以特斯拉为例,Model 3的车身控制区域包括前车身控制模块、左车身控制模块、右车身控制模块。其中,大电流负载采用的就是驱动芯片+MOSFET方案,小电流负载则采用的是HSD高边开关集成方案。
特斯拉Model 3车身控制模块配电方案
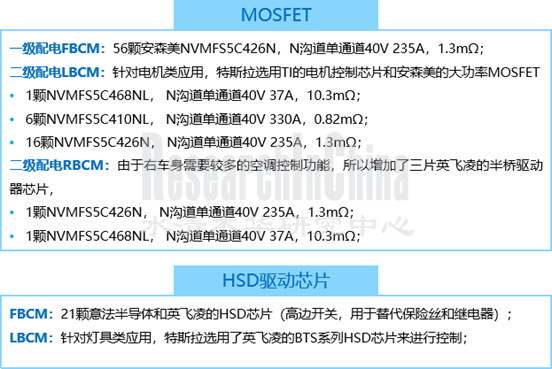
来源:佐思汽研《2023年车身(区)域控制器及驱动芯片行业研究报告》
1、车身(区)域控制器MCU
车身域控制器对于算力的要求并不高,其主控芯片以车规级MCU为主。但在中央集中式架构下,算力将逐渐向中央集中,因此,在区域控制器中需要使用一颗性能、资源更加强大的车规级MCU作为主控芯片。
NXP的S32G3处理器是针对域控制器领域研发的芯片,有着实时的处理能力、面向服务高性能计算的先进算力、跨域集成以及高性能安全处理。最新一代的S32G3系列在2021年底正式对外发布,并于2023年2月实现量产。主机厂将S32G3处理器用于软件定义汽车(SDV)的中央汽车计算,以托管汽车服务、整合跨域功能(虚拟ECU)、提供安全网关功能并管理全车的无线(OTA)更新。
NXP S32G3的目标应用
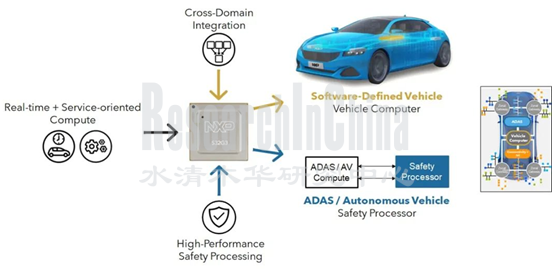
来源:恩智浦
在2023年上海车展中正式亮相的广汽昊铂Hyper GT,作为旗下首款搭载星灵架构的纯电车型,其中央计算单元即采用了恩智浦最新一代网络处理器S32G3,这也是全球首款采用S32G3作为其中央计算单元处理器的车型。
2、SmartFET在区域控制器中的应用
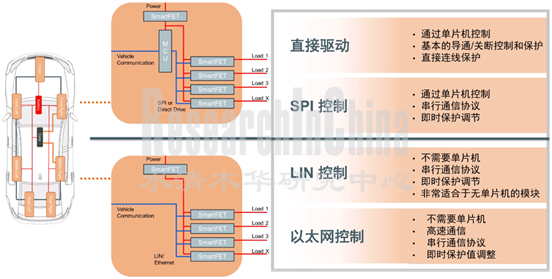
SmartFET是用于外部负载(如中央电器盒中的继电器)的高/低边驱动,实际上,高边SmartFET 是一个N沟道的MOSFET,由一个稳压电荷泵将栅极电压拉高到足以驱动负载。这些驱动自身需要额外的保护功能,如短路保护、热关断(有或者没有自动恢复功能)、过压保护、逻辑电平控制(单片机直接控制)和ESD保护等。
SmartFET在区域控制器中的应用
来源:安森美
安森美SmartFET可用作智能保险丝,在区域控制器中保护电源、为区域控制器驱动的所有负载提供带保护电源等,可应用于车内外照明应用和电容式负载、电感式负载(雨刷器、HVAC、车门等)、电阻式负载(LED和加热单元等)的驱动。
3、HSD智能高边开关集成方案
在灯光类等车辆的小电流负载控制方面,HSD芯片(High Side Driver)早已得到广泛应用。当发生单路短路故障时,HSD芯片的保护动作速度远高于保险丝,其安全性更高。
ST的M0-7系列家族化高边产品,满足了目前车身控制模块丰富的诊断、保护,高度集成以及尺寸最优化等系统要求,可实现兼容性设计。其较小的封装,强大的驱动能力尽可能地减少了PCB板的面积。小鹏P7的BDU车身域控制器里即大量采用了ST 的智能高/低边驱动M0-7系列产品。
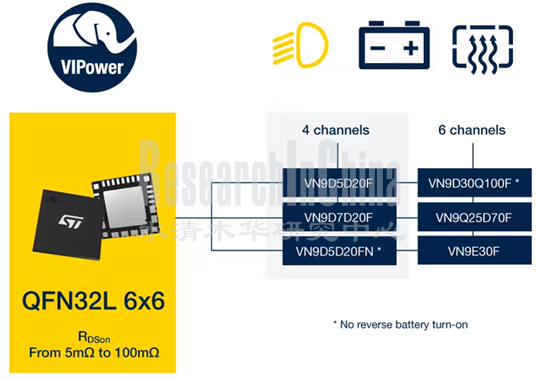
ST的M0-9系列产品是新一代汽车智能开关,专为使用12V电池供电的应用中的高侧连接而设计,简化了ECU的硬件和软件设计,该款开关是市场上第一款具有全数字片上诊断功能(包括数字电流检测功能)的开关。
M0-9系列产品利用了ST的最新一代VIPower* M0-9技术,将高效的40V沟槽型垂直MOSFET与3.3V数字逻辑,以及高精度模拟电路结合在一个6x6mm的QFN封装中。与市场上现有的同类驱动器IC相比,其紧凑的尺寸和高集成度减少了高达40%的PCB面积。
ST M0-9系列产品框图
来源:意法半导体
总体而言,车身域控驱动控制方案未来的方向还是基于单芯片方案的智能HSD芯片,随着技术的进步及成本的下降,应用范围会逐步扩大到车辆的整个电气系统,但个别极大电流应用仍将采用驱动+MOSFET的分立方案,整车电气架构将在2025-2030年之间加速演进。
第一章 车身(区)域控概述
1.1 整车电子电气架构
1.1.1 整车电子电气架构的开发模式由线性转向星型(1)
1.1.2 整车电子电气架构的开发模式由线性转向星型(2)
1.1.3 支撑软件先行的四种创新E/E架构(1)
1.1.4 支撑软件先行的四种创新E/E架构(2)
1.1.5 整车电气架构发展趋势:垂直融合
1.1.6 下一代区域电子电气架构:“中央计算+区域控制器”
1.1.7 汽车E/E架构演进的过程中ECU的变化
1.1.8 区域控制单元(ZCU)可减少ECU数量
1.1.9 主机厂加紧布局“中央计算+区域控制器” 架构
1.1.10 特斯拉Model 3集中式电子电气架构
1.1.11 小鹏汽车集中式电子电气架构——X-EEA 3.0
1.1.12 蔚来下一代电子电气架构:中央计算+区域控制
1.1.13 理想:整车电子电气架构的演进
1.1.14 主机厂汽车电子电气架构布局情况(1)
1.1.15 主机厂汽车电子电气架构布局情况(2)
1.2 车身域控制器发展和演进
1.2.1 车身控制系统的演变过程
1.2.2 车身域控制器概念
1.2.3 车身域控制器的主要功能
1.2.4 车身域控集成空调系统的方案
1.2.5 车身域控制器的构成
1.2.6 车身域控制器的技术及性能要求
1.2.7 车身域控制系统关键技术和开发实践
1.2.8 车身域控硬件平台特性一:输出控制
1.2.9 车身域控硬件平台特性二:输入采集(1)
1.2.10 车身域控硬件平台特性二:输入采集(2)
1.2.11 基于芯驰G9X的车身域控制器硬件设计(1)
1.2.12 基于芯驰G9X的车身域控制器硬件设计(2)
1.2.13 基于芯驰G9X的车身域控制器硬件设计(3)
1.2.14 基于芯驰G9X的车身域控制器硬件设计(4)
1.2.15 基于芯驰G9X的车身域控制器硬件设计(5)
1.2.16 2022年中国乘用车车身域控制器渗透率
1.2.17 2022-2025年中国乘用车车身域控制器市场规模预测
1.2.18 国外车身域控制器供应商及产品列表
1.2.19 国内车身域控制器供应商及产品列表(1)
1.2.20 国内车身域控制器供应商及产品列表(2)
1.2.21 国内车身域控制器供应商及产品列表(3)
1.3 区域控制器发展和演进
1.3.1 区域控制器的定义
1.3.2 区域控制器功能一:区域供电中心
1.3.3 区域控制器功能二:区域信息中心
1.3.4 区域控制器功能三:区域功能与驱动中心
1.3.5 区域控制器的设计方案
1.3.6 区域控制器是多个ECU的集成点
1.3.7 区域控制器将I/O与计算设备分离开来
1.3.8 区域控制器简化向48V电气系统架构的转变
1.3.9 区域控制器的开发应用案例
1.3.10 金脉电子区域控制器(ZCU)解决方案
1.3.11 国外区域控制器供应商及产品列表
1.3.12 国内区域控制器供应商及产品列表(1)
1.3.13 国内区域控制器供应商及产品列表(2)
1.3.14 国内区域控制器供应商及产品列表(3)
1.4 车身(区)域控的相关政策及标准
1.4.1 《SDV服务API参考》规范
1.4.2 SDV 定义的服务软件架构分为四层
1.4.3 SDV 标准化 API 接口的意义
1.4.4 车身域控制器BCM/BDU功能安全标准——概念设计(1)
1.4.5 车身域控制器BCM/BDU功能安全标准——概念设计(2)
1.4.6 车身域控制器BCM/BDU功能安全标准——概念设计(3)
第二章 车身控制功能的多种融合方式
2.1 车身域的跨域融合
2.1.1 功能域向中央计算架构演进,多域融合是必经之路
2.1.2 以跨域功能融合为基础,实现“车人融合”和“车路融合”
2.1.3 车身域与其他域的融合
2.1.4 博泰车联网的跨域融合思路
2.1.5 博泰车联网:座舱域与车控域融合
2.1.6 博泰车联网:下一代多域融合控制器集成车控域
2.1.7 车身域融合计算案例(1)
2.1.8 车身域融合计算案例(2)
2.1.9 车身域融合计算案例(3)
2.1.10 车身域融合计算案例(4)
2.1.11 主机厂三域(中央控制域)融合方案总结
2.1.12 Tier1多域融合解决方案(1)
2.1.13 Tier1多域融合解决方案(2)
2.2 车身域与网关融合
2.2.1 车身控制与网关融合成为趋势
2.2.2 车身控制与网关集成案例(1)
2.2.3 车身控制与网关集成案例(2)
2.2.4 车身控制与网关集成案例(3)
2.2.5 国内外主机厂车身域集成网关的发展情况
2.2.6 集成网关的车身域控供应商列表(1)
2.2.7 集成网关的车身域控供应商列表(2)
2.2.8 车身域集成网关的发展
2.3 BCM功能与智能配电盒集成
2.3.1 智能配电盒如何实现对车身的控制?
2.3.2 智能配电盒的发展阶段
2.3.3 智能配电盒在汽车的布置位置
2.3.4 大规模量产后的智能配电盒的成本结构
2.3.5 长安汽车的智能配电盒方案
2.3.6 特斯拉:Model 3智能配电盒方案
2.3.7 安波福:智能配电盒解决方案
2.3.8 集成BCM功能的智能配电盒供应商列表
第三章 车身(区)域控制器的芯片应用
3.1 车身(区)域控制器的配电方案
3.1.1 车身域控基于半导体器件的两种配电方案
3.1.2 HSD芯片 VS MOS管的耐冲击电流能力
3.1.3 车身域控负载驱动芯片的选择
3.1.4 Model 3车身控制模块的配电芯片方案
3.1.5 极氪区域控制器中的智能配电设计(1)
3.1.6 极氪区域控制器中的智能配电设计(2)
3.1.7 智能配电在车控领域的发展
3.1.8 区域控制器配电的失效保护
3.2 驱动芯片+MOSFET方案
3.2.1 大电流:驱动芯片+ MOSFET分立方案
3.2.2 E-Fuse控制逻辑
3.2.3 区域控制器中PNC与E-FUSE结合的设计(1)
3.2.4 区域控制器中PNC与E-FUSE结合的设计(2)
3.2.5 SmartFET在区域控制器中的应用
3.2.6 高边SmartFET的应用
3.2.7 安森美高边驱动SmartFET产品解决方案
3.2.8 区域控制器中的汽车智能驱动模块
3.2.9 汽车智能驱动方案
3.2.10 智能驱动模块六大功能(1)
3.2.11 智能驱动模块六大功能(2)
3.2.12 安森美已量产的智能驱动IC系列产品
3.2.13 车身控制模块MOSFET供应商列表
3.2.14 功率MOSFET价格
3.3 HSD高边开关集成方案
3.3.1 高/低边驱动的工作原理
3.3.2 车身域控中用HSD芯片替代继电器与保险丝
3.3.3 高边驱动芯片的驱动能力仿真
3.3.4 基于ST的TwisterSIM高边驱动仿真软件实验设计(1):软件介绍
3.3.5 基于ST的TwisterSIM高边驱动仿真软件实验设计(2):仿真步骤(1)
3.3.6 基于ST的TwisterSIM高边驱动仿真软件实验设计(3):仿真步骤(2)
3.3.7 如何使用高边开关驱动车灯?(1)
3.3.8 如何使用高边开关驱动车灯?(2)
3.3.9 如何使用高边开关驱动车灯?(3)
3.3.10 如何使用高边开关驱动车灯?(4)
3.3.11 车身域控高边驱动芯片应用案例(1)
3.3.12 车身域控高边驱动芯片应用案例(2)
3.3.13 国外车身域控HSD芯片供应商列表(1)
3.3.14 国外车身域控HSD芯片供应商列表(2)
3.3.15 国内车身域控HSD芯片供应商列表(2)
3.4 车身(区)域主控芯片MCU
3.4.1 车身(区)域控的主控芯片以车规级MCU为主
3.4.2 车身(区)域控对于MCU芯片的性能需求
3.4.3 区域控制器进行主控芯片MCU选型应注意什么?(1)
3.4.4 区域控制器进行主控芯片MCU选型应注意什么?(2)
3.4.5 车身(区)域控MCU芯片解决方案
...
3.4.17 车身(区)域控MCU芯片应用实例(1)
3.4.18 车身(区)域控MCU芯片应用实例(2)
3.4.19 车身控制MCU市场国产化替代情况
3.4.20 国外车身控制MCU产品选型(1)
3.4.21 国外车身控制MCU产品选型(2)
3.4.22 国外车身控制MCU产品选型(3)
3.4.23 国内车身控制MCU厂商产品选型(1)
3.4.24 国内车身控制MCU厂商产品选型(2)
3.4.25 国内车身控制MCU厂商产品选型(3)
第四章 主机厂车身(区)域案例介绍
4.1 特斯拉
4.1.1 特斯拉车身控制区域划分
4.1.2 特斯拉车身域控制思路:按照位置划分区域,实现硬件标准化、软件定义汽车
4.1.3 特斯拉车身区域控制器位置分布: 以Model 3为例
4.1.4 特斯拉Model 3车身区域控制(第一代)设计(1):前车身区域(1)
4.1.5 特斯拉Model 3车身区域控制(第一代)设计(1):前车身区域(2)
4.1.6 特斯拉Model 3车身区域控制(第一代)设计(2):左、右车身区域(1)
4.1.7 特斯拉Model 3车身区域控制(第一代)设计(2):左、右车身区域(2)
4.1.8 Model 3车身区域控制器技术特征总结
4.1.9 特斯拉车身区域控制未来走向(1)
4.1.10 特斯拉车身区域控制未来走向(2)
4.2 宝马
4.2.1 BMW车身电子域控的演进
4.2.2 BMW的三代车身电子域控BDC:Gen 1
4.2.3 BMW的三代车身电子域控BDC:Gen 2
4.2.4 BMW的三代车身电子域控BDC:Gen 3
4.2.5 BMW联合ADI对于汽车氛围灯控制的思考(1)
4.2.6 BMW联合ADI对于汽车氛围灯控制的思考(2)
4.2.7 BMW联合ADI对于汽车氛围灯控制的思考(3)
4.3 沃尔沃
4.3.1 沃尔沃车身控制架构中CEM模块的演进
4.3.2 沃尔沃车身控制:CEM模块
4.3.3 沃尔沃SPA2架构:区域控制器VIU功能分配
4.3.4 沃尔沃SPA2:VIU区域控制器系统架构
4.4 大众
4.4.1 大众:ICAS1车辆控制域
4.4.2 大众ICAS1:µ性能处理器承担的功能
4.4.3 大众ICAS1:车身控制网络架构
4.4.4 大众ICAS1:车辆控制域架构及供应商
4.4.5 大众ICAS1车身控制功能的实现逻辑(1):无钥匙进入系统
4.4.6 大众ICAS1车身控制功能的实现逻辑(2):车内附件系统
4.4.7 大众MEB平台的灯光控制逻辑(1)
4.4.8 大众MEB平台的灯光控制逻辑(2)
4.4.9 大众MEB平台的灯光控制逻辑(3):大灯的驱动控制
4.4.10 大众MEB平台的灯光控制逻辑(4):内饰灯的驱动控制
4.5 广汽
4.5.1 广汽星灵架构的中央运算单元由车身域控制
4.5.2 广汽车身域控
4.5.3 广汽车身Computer处理器:恩智浦S32系列
4.6 长城
4.6.1 长城汽车电子电气架构演进
4.6.2 长城GEEP 4.0:中央计算单元CCU
4.7 理想
4.7.1 理想:XCU中央域控制器(动力、底盘、车身)
4.7.2 理想LEEA3.0:中央计算平台CCU实现多域融合
4.7.3 理想LEEA3.0:区域控制器ZCU
4.8 比亚迪
4.8.1 比亚迪e3.0:四大域(左/右车身域、智能域、动力域)
4.8.2 比亚迪e3.0:集成式左右车身控制器
4.8.3 比亚迪e3.0:海豚与汉的整车网络架构对比
4.8.4 比亚迪e3.0:左车身域控制器的整体接口和交互
4.9 其他
4.9.1 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
4.9.2 极氪车身控制融合:中央超算平台
4.9.3 一汽红旗:车身域控制器BDCM
4.9.4 长安CIIA 2.0:整车控制域SVCU
第五章 国外车身(区)域控制器方案厂商研究
5.1 安波福
5.1.1 安波福简介
5.1.2 安波福:智能网联产品布局
5.1.3 安波福:智能汽车SVA架构
5.1.4 安波福:SVA架构五大计算平台
5.1.5 安波福区域控制器:电源数据中心PDC、车辆中央控制器CVC
5.1.6 安波福区域控制器(PDC)的配置方案
5.2 博世
5.2.1 博世简介
5.2.2 博世:智能驾驶与控制业务布局
5.3 大陆
5.3.1 大陆集团简介
5.3.2 大陆集团车身高性能计算单元 (Body HPC)如何实现车身控制?
5.3.3 大陆Body HPC上车案例分享:在大众ID.3中的应用
5.3.4 大陆:跨域车辆控制高性能计算单元
5.3.5 大陆:区域控制器
5.3.6 大陆:面向车身域和执行器推出的“软件功能及产品” 解决方案
5.4 联合电子
5.4.1 联合电子简介
5.4.2 联合电子:车身控制系统产品布局
5.4.3 联合电子:车身域控制器BDU8.1
5.4.4 联合电子:面向车辆融合的软硬件平台服务部署(1)
5.4.5 联合电子:面向车辆融合的软硬件平台服务部署(2)
5.4.6 联合电子发布USP2.0开发者平台,首个区域控制器产品即将批量生产(1)
5.4.7 联合电子发布USP2.0开发者平台,首个区域控制器产品即将批量生产(2)
5.4.8 联合电子:区域控制器ZECU的供电设计
5.4.9 联合电子区域控制器的智能配电应用
第六章 国内车身(区)域控制器方案厂商研究
6.1 经纬恒润
6.1.1 经纬恒润简介
6.1.2 经纬恒润汽车电子产品线
6.1.3 经纬恒润车身域控布局及核心技术
6.1.4 经纬恒润车身域控制器:产品特点及功能
6.1.5 经纬恒润下一代架构产品布局(1):中央计算平台产品CCP
6.1.6 经纬恒润下一代架构产品布局(2) :物理区域控制单元ZCU(1)
6.1.7 经纬恒润下一代架构产品布局(2) :物理区域控制单元ZCU(2)
6.2 铁将军
6.2.1 铁将军简介
6.2.2 铁将军电子产品生产线
6.2.3 铁将军:车身域控产品线布局
6.2.4 铁将军:车身区域控制器ZCU&VIU
6.3 远峰科技
6.3.1 远锋科技简介
6.3.2 远峰科技:新一代车身区域控制器
6.3.3 远峰科技:功能域架构下的车身区域控制器产品结构
6.3.4 远峰科技:中央计算架构下的区域控制器
6.4 诺博科技
6.4.1 诺博科技简介
6.4.2 诺博科技:车身域控产品演进路线
6.4.3 诺博科技车身域控产品(1):中央电子控制模块CEM
6.4.4 诺博科技车身域控产品(2):中央电子控制模块CEM的构成
6.5 科博达
6.5.1 科博达简介
6.5.2 科博达:汽车电子产品产线及产能
6.5.3 科博达:域控产品发展及研发布局
6.5.4 科博达:车身域控产品单车价值量
6.5.5 科博达:公司客户资源情况
6.6 欧菲光
6.6.1 欧菲光简介
6.6.2 欧菲光:车身电子产品布局
6.6.3 欧菲光:第五代车身域控制器BGM
6.6.4 欧菲光第五代车身域控制器:软硬件部分
6.7 埃泰克
6.7.1 埃泰克简介
6.7.2 埃泰克:产线及产能
6.7.3 埃泰克:车身域产品系列
6.7.4 埃泰克:三域(车身域+座舱域+ADAS域)融合
6.8 领世科技
6.8.1 领世科技简介
6.8.2 领世科技(区)域控制产品部署
6.8.3 领世科技中央控制器(CCU)
6.9 罗思韦尔
6.9.1 罗思韦尔简介
6.9.2 罗思韦尔车身域控制器发展规划
6.9.3 罗思韦尔车身域控主要功能及配置
6.9.4 罗思韦尔四款平台化车身域控制器
6.10 领科汇智
6.10.1 领科汇智简介
6.10.2 领科汇智生产基地及产能
6.10.3 领科汇智:车身域控制器BDM
6.11 华为
6.11.1 华为CCA架构:VCU中央计算+3-5个VIU区域控制器
6.11.2 华为全栈式智能汽车解决方案框图
6.11.3 华为区域控制器VIU的功能实现