随着车载软件复杂度的不断提升,中科创达车载操作系统产品和技术的需求不断增加。2022年,中科创达智能汽车业务实现收入17.93 亿元,同比增长46%。
中科创达的未来方向是构建以“芯片+车载操作系统”为核心的舱驾融合业务体系:
(1)在产业链层面,同时对接芯片厂商与主机厂,提供操作系统与智能座舱、自动驾驶方向的综合解决方案。在软硬解耦大趋势下,软件供应商直接与主机厂对接的需求在增加,中科创达开始向Tier1供应商转变。
(2)在技术层面,通过“自研+收购”的方式不断更新迭代汽车智能座舱相关技术体系。
(3)在业务生态层面,通过与高通等芯片厂商的深度绑定,持续拓展与全球范围内主机厂的合作。
AI大模型引领 Smart to Intelligent 战略升级
2023年,中科创达全面启动 Smart to Intelligent 战略升级,未来目标是从智能应用中心发展为以模型驱动的机器与机器、机器与人交互的智能业务体系,并推出了Rubik系列AI大模型。
中科创达的人工智能技术包括视觉分析,AI图像生成,AI语音识别和降噪,多模态模型等多项技术,不仅获得相关收入,并在智能汽车业务上已经落地。
2023年5月,中科创达举行Thunder World2023发布会,发布“魔方”(Rubik)大模型,包括Rubik Auto、Rubik Enterprise、Rubik Studio以及Rubik GeniusCanvas等系列产品。
其中Rubik Auto满足客户的三类要求(端侧运行/私有云+Plugin/多种模型开放共存),支持客户私有化部署,也支持模型量化、剪裁,进而适配各类芯片,据中科创达披露,Rubik Auto已与海外头部车企合作,基于模型做POC研发。
Rubik Genius Canvas(天才画布工具)则结合了Rubik Studio与HMI设计工具KANZI的特点,进一步提升座舱设计工具的竞争力;在Rubik GeniusCanvas辅助下,概念创作周期可缩短70%,从原来的3-4周缩短至1周左右;3D元素设计周期可缩短85%,从原来的4-6周缩短至3天左右。截至2023年5月底,大模型在Rubik GeniusCanvas、车机主题商店(AU自动生成车机主题等)、LLM AI Assistant(大模型智能助手)三个应用方向的方案进展已经基本成熟,在智能座舱、智能驾驶等方向的研发还在进行中。
中科创达Rubik系列AI模型

中科创达Rubik Genius Canvas工具

图片来源:中科创达
围绕“芯片+操作系统”核心优势,打造舱驾融合业务生态
2022年,中科创达开始研发汽车HPC系统组件,并开发智能汽车整车操作系统。整车操作系统对中央计算平台硬件架构的定义和适配、平台核心应用的预集成可支持产品的快速量产、迭代。
在规划中,整车操作系统的基础包括当前的操作系统版本和Rubik大模型,能实现算力弹性伸缩、数据无缝共享,以及创新的AI人机交互等能力,是面向中央计算的全栈软件平台,后期可能会建立在高通8795平台的基础上。
以整车操作系统的研发为契机,中科创达进一步拓展舱驾融合的业务生态:相比市场上“激光雷达+高精度地图”的“硬件+软件”综合解决方案,中科创达后续对智能座舱方案的规划以“芯片+操作系统”为主,采用高通等公司的芯片产品,结合即将研发的整车操作系统,打造舱驾融合综合方案,该方案的性价比较为突出。
舱驾融合的综合方案主要由子公司畅行智驾进行研发。截至2023年6月,畅行智驾已经推出RazorDCX系列以及RazorWare1.0等域控产品,并计划在2023年第四季度推出基于Snapdragon Ride Flex平台的舱驾融合域控解决方案。
2024年即将量产基于高通8795的域控方案
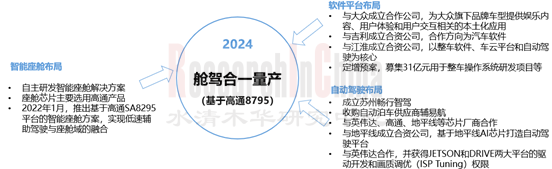
图片来源:佐思汽研
整合产业链上下游,构建平台竞争力
2016年起,中科创达先后收购爱普新思、慧驰科技、RIGHTWARE等公司,完善了智能汽车操作系统相关配套技术(如视觉交互与座舱设计技术)体系,构建了“收购+自研”的技术发展路径。此外,中科创达通过一系列收购措施,拓展了主机厂以及Tier1的汽车业务生态,进一步加强了“操作系统+UI设计+图像视觉”生态体系的产品矩阵竞争力。
中科创达将UI设计与视觉技术融入操作系统产品体系

图片来源:华安证券
2019年以来,中科创达通过整合产业链,与战略合作伙伴(包括芯片厂商、主机厂、运营商、软件和互联网开发商、元器件厂商等)密切合作,如中科创达在业务生态上深度绑定高通,高通硬件开发后形成流片版本,该版本优先释放到中科创达内部,中科创达通过二者的合资公司创通联达帮高通做点亮,再与下游车企做差异化。中科创达预集成众多行业合作伙伴IP的同时,保持生态中立,可大幅降低主机厂与供应商的管理复杂度。
中科创达业务从智能座舱扩展到智能驾驶,业务场景有序延展,包括分别与高通、QNX、NXP、英伟达等公司协作运营联合实验室,分别与Arm、高通、地平线成立合资公司,即安创空间加速器、创通联达(Thundercomm)、畅行智驾、聚创智行等。在此过程中,中科创达一直坚持全球化的配套策略,并于2023年6月申请在瑞士进行募资。
中科创达合作的芯片厂商
图片来源:中科创达
中科创达与合作伙伴成立的部分合资公司

来源:佐思汽研
2023年5月,中科创达与高通再次合作,成立苏州高铁新城创新中心,确立舱驾融合和整车融合的发展路线。该路线能够大幅降低整个汽车制造的成本,同时简化制造、生产包括整个线路和设计,其相应的操作系统也会提升为整车操作系统,再度达成高通芯片+中科创达操作系统的深度合作模式。
高通芯片+中科创达操作系统合作模式
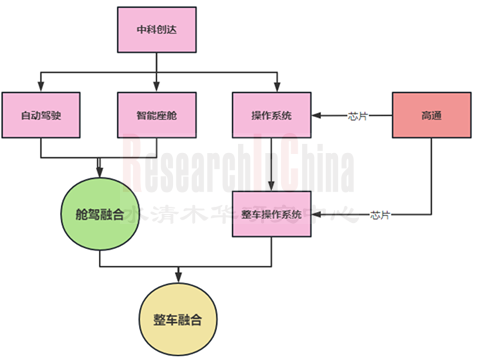
图片来源:佐思汽研
1 公司及业务简介
1.1 公司简介
1.2 发展路径
1.3 业务收入情况:总收入与汽车板块收入
1.3 业务收入情况:不同业务模式下的收入
1.4 汽车业务发展架构
1.5 中科创达座舱产品线
1.6 中科创达座舱产品路线图
1.7 中科创达人机交互产品路线图
1.8 中科创达视觉相关业务路线图
1.9 中科创达车联网相关业务路线图
1.10 中科创达软件定义汽车业务布局
1.11 2022-2023年在研项目情况
1.12 战略布局:全球化生态合作
1.13 战略布局:与芯片公司/主机厂成立合资公司
1.13.1 与芯片厂商联合创新
1.13.2 确立“芯片+操作系统”方向
1.14 战略布局:向AI时代转变
1.15 产品布局:收购有竞争力产品
1.16 产品布局:通过软件实现差异,捆绑芯片落地
1.17 中科创达商业模式
1.18 中科创达智能驾驶舱产品业务模式
1.19 中科创达软件产品业务模式
1.20 中科创达与供应商合作模式
1.21 技术布局
1.22 中科创达软件定义汽车业务主要软件工具及服务
1.23 合作伙伴
2 座舱解决方案
2.1 中科创达智能座舱主要技术
2.2 中科创达座舱业务布局及发展战略
2.3 中科创达智能座舱发展路线
2.4 中科创达智能座舱系统E-Cockpit演进路线
2.5 中科创达全新智能座舱解决方案
2.6 中科创达DMS应用:智能驾驶舱 6.0
2.7 中科创达智能座舱解决方案E-Cockpit 7.0
2.8 中科创达座舱OS演进路线
2.9 座舱跨域融合探索
2.10 中科创达舱泊一体智能座舱解决方案
3 座舱设计
3.1 中科创达HMI设计工具:KANZI
3.2 KANZI HMI架构
3.3 KANZI HMI设计流程
3.4 中科创达KANZI支持的平台
3.5 中科创达HMI 2.0
3.6 HMI工具:Kanzi One
3.7 中科创达仪表设计平台:Kanzi HYBRID
3.8 中科创达KANZI最新动态
3.9 KANZI与AI大模型“Rubik魔方”结合
3.10 大模型发展路径
3.11 Rubik GeniusCanvas
4 操作系统
4.1 操作系统特点
4.2 合作伙伴
4.3 整车操作系统
4.4 SOA中间件平台
4.5 SOA场景应用
4.6 IVI系统架构
5 智能驾驶
5.1 中科创达智能驾驶业务
5.2 子公司畅行智驾及主要产品
5.3 舱驾融合规划
5.4 畅行智驾智能驾驶解决方案
5.4.1 畅行智驾域控中间件RazorWareX1.0(架构)
5.4.2 畅行智驾域控中间件RazorWareX1.0(兼容性)
5.4.3 畅行智驾自动驾驶域控中间件
5.5 畅行智驾第一代RazorDCX Takla
5.6 畅行智驾第二款量产级智能驾驶域控解决方案
5.7 畅行智驾域控配套工具:RazorAIKit
5.8 畅行智驾自动驾驶域控制器:产品矩阵
5.9 畅行智驾业务策略:合作开发模式
5.10 畅行智驾SOA软件平台
5.11 针对单SOC舱驾融合的解决路径
5.12 舱驾融合方案:产品
5.13 舱驾融合方案:规划
5.14 新计划:基于骁龙Flex平台的舱驾融合域控解决方案
5.15 新计划:骁龙Flex SoC简介
5.16 中科创达融合泊车解决方案
5.17 中科创达融合泊车功能
6 其他产品和方案
6.1 智能视觉产品及核心技术
6.2 环视+DMS视觉算法
6.3 CMS电子外后视镜解决方案
6.4 中科创达多域融合方案
6.5 边缘计算项目
6.6 OTA解决方案:ThunderFOTA
6.6.1 OTA产品特点(1)
6.6.2 OTA产品特点(2)