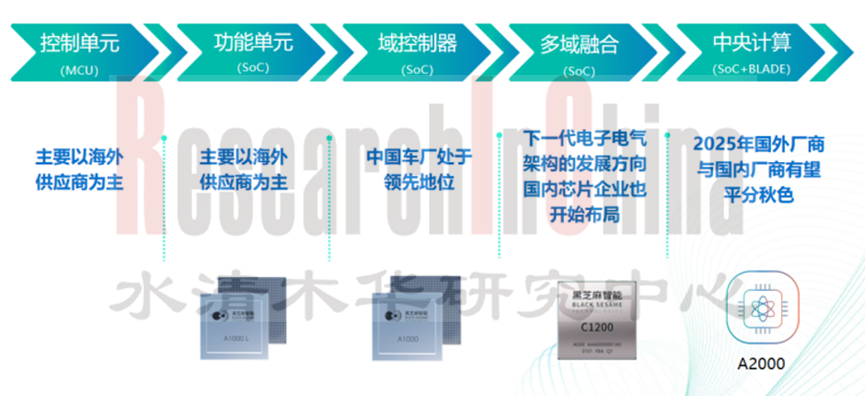
随着汽车智能化发展,电子电气架构开始从域控集中式架构,向多域融合计算和中央计算演进。在此发展趋势下,主机厂、Tier 1及芯片企业都迎来了新的市场机会。
•2023年7月,上汽推出VMC 整车中央协调运动控制器技术,基于整车的中央融合运动控制,使车辆跨域控制的链路更短,在人驾或者智能驾驶的状态下,能够更高效对车身和底盘进行控制;
•2023年7月,比亚迪首发的高阶智能驾驶辅助系统 " 天神之眼 "采用中央计算平台加区域控制器深度协同的系统架构。
部分主机厂多域融合计算布局
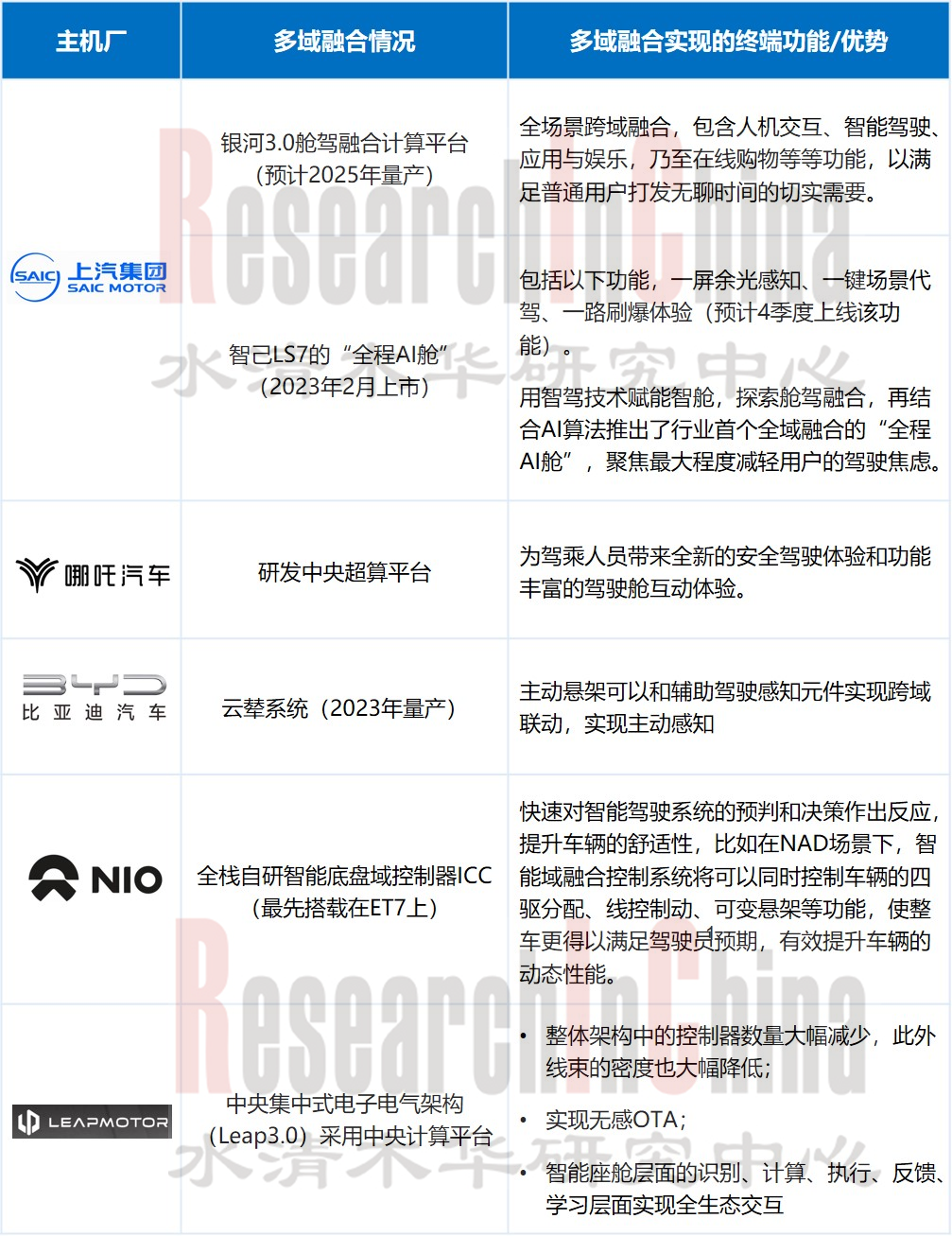
来源:佐思汽研《2023年智能汽车多域计算行业研究报告》
各大Tier1供应商依托自身优势切入多域计算领域
从各大Tier1供应商的布局来看,多域计算的布局方式比较灵活,供应商主要依靠自身优势领域,布局车身域与底盘域、车身域与座舱域、底盘域与智驾域等多域融合。
部分Tier1供应商多域计算布局

来源:佐思汽研《2023年智能汽车多域计算行业研究报告》
>联合汽车电子
联合汽车电子成立专门跨域控制业务部,与地平线、东软睿驰、艾拉比、领目科技、泰科电子等生态伙伴签署了战略合作协议。
2022年12月,联合汽车电子推出车载计算平台VCP,采用了NXP S32G 新一代SoC芯片,集成了动力域和车身域相关功能,包括整车控制、BCM、网关等,部分项目集成辅助驾驶功能;
2023年5月,联合汽车电子推出整车运动域控制器VCU8.5平台,针对跨域融合控制的需求进行了系统的分析和设计,集成了EPB、FlexRay和Delay off等功能。
>大陆
2023年4月,大陆集团首次展出跨域的车辆控制高性能计算单元,除了集成原有的车身控制和整车网关功能之外,还集成了底盘控制应用。目前,大陆已经在中国拿下了两个本土订单,广汽埃安旗下昊铂Hyper GT车型将成为首发量产车,预计到2024年该高性能计算单元将搭载在多家汽车厂商的30多个不同车型上。

来源:大陆
>博泰车联网
2023年6月,博泰车联网成功开发首款整车中央计算平台(即Central Computering Module,CCM),CCM基于中央网关扩展算力,融合智能座舱功能、高级辅助自动驾驶、车身功能、整车控制功能等。

来源:博泰
多域计算关键技术支撑:多域计算SoC、跨域融合软件平台
目前,多域融合主要从硬件和软件两个层面去考虑,从硬件融合角度看,目前多域融合主要采用的多SoC芯片集成,将不同的域控制合并到一个盒子里,由多个SoC或者MCU构成,不同的功能由不同的芯片支持。而单芯片实现多域融合则是需要一颗SoC完成不同的功能,目前来看实现单SoC芯片多域融合还存在一定挑战。
芯片厂商多域计算SoC芯片产品布局
5.jpg)
来源:佐思汽研《2023年智能汽车多域计算行业研究报告》
>黑芝麻智能
2023年4月,黑芝麻智能推出武当系列首款产品C1200,是国内首个车规级跨域多功能融合计算芯片,可满足自动驾驶、智能座舱、车身控制及其他计算功能。
武当C1200支持锁步的车规级高性能CPU核A78AE(性能高达150KDMIPS)和车规级高性能GPU核G78AE,内置成熟高性能的Audio DSP模块和每秒在线处理1.5G像素的新一代自研NeuralIQ ISP模块。此外,C1200还内置支持ASIL-D等级的Safety Island、国密二级和EVITA full的Security模块,可以满足车规安全等级最高的可靠性要求。
黑芝麻智能针对不同级别E/E架构的芯片布局
来源:黑芝麻智能
除了芯片,跨域融合的发展还需要整车级的OS系统做支撑。目前汽车各个功能域尚未完全打通,全球范围内还没有一个可以直接长期应用的智能汽车操作系统,这对国内汽车OS厂商来说是一个弯道超车的机会。
>智达诚远(诚迈科技)
2023年4月,诚迈科技旗下的智达诚远推出了跨域融合整车软件计算平台——峰昇操作系统Fusion OS,产品重点兼容不同域的操作系统。FusionOS将智能座舱、中央控制、智能驾驶等核心功能域从底层快速打通,实现各功能模块的高度集成。

来源:诚迈科技
《2023年智能汽车多域计算行业研究报告》主要研究内容如下:
•多域计算发展思路,包括中央域控制器、驾舱合一、座舱域和车身域融合、底盘域和智驾域融合、中央计算平台+区域控制器等融合方式发展情况、主要案例等研究;
•多域计算关键技术,包括多域融合计算SoC、多域计算软件OS、多域计算以太网、多域计算网关、区域控制器等发展趋势、实际案例等研究;
•主机厂多域融合发展规划、产品研发情况、技术布局等研究;
•国内、国外Tier 1在多域计算、区域控制器等领域的产品、技术布局、合作情况等研究。
01 典型的多域计算架构思路
1.1 多域融合计算发展思路
1.1.1 多域融合需要“集成式”开发
1.1.2 多域计算最常见的演进逻辑
1.1.3 多域计算发展现状:五类设计思路
1.1.4 多域融合技术趋势
1.1.5 国外Tier1多域计算解决方案
1.1.6 国内Tier1多域计算解决方案(1)
1.1.7 国内Tier1多域计算解决方案(2)
1.1.8 Tier1多域计算合作思路总结(1)
1.1.9 Tier1多域计算合作思路总结(2)
1.2 多域融合计算思路一
1.2.1 中央控制域软件功能部署
1.2.2 OEM主机厂中央控制器域方案
1.2.3 中央控制域多域融合计算:极氪汽车
1.2.4 中央控制域多域融合计算:极氪汽车行驶区域控制器规划
1.2.5 中央控制域多域融合计算:大众 iCAS1
1.2.6 中央控制域多域融合计算:大众 iCAS1装车位置
1.2.7 中央控制域多域融合计算:大众 iCAS1硬件资源
1.2.8 中央控制域多域融合计算:联合电子整车运动域控制器VCU8.5平台
1.2.9 中央控制域多域融合计算:联合电子面向车辆融合的计算平台
1.2.10 中央控制域多域融合计算:大陆跨域的车辆控制高性能计算单元
1.2.11 中央控制域多域融合计算:东软睿驰基于NXP S32G打造通用域控制器
1.3 多域融合计算思路二
1.3.1 不同等级自动驾驶舱驾融合的必要性
1.3.2 驾舱融合的主要形式
1.3.3 驾舱融合的技术演进路线
1.3.4 驾舱融合市场现状一
1.3.5 案例一
1.3.6 案例二
1.3.7 案例三
1.3.8 驾舱融合市场现状二
1.3.9 Tier 1驾舱融合部署案例一
1.3.10 Tier 1驾舱融合部署案例二
1.3.11 Tier 1驾舱融合部署案例三
1.3.12 Tier 1驾舱融合部署案例四
1.3.13 主机厂驾舱融合部署案例一:上汽零束3.0舱驾融合计算平台(1)
1.3.14 主机厂驾舱融合部署案例一:上汽零束3.0舱驾融合计算平台(2)
1.3.15 主机厂驾舱融合部署案例二
1.3.16 主机厂驾舱融合部署案例三
1.4 多域融合计算思路三
1.4.1 座舱域+车身域多域融合计算:博泰车联网
1.4.2 座舱域+车身域多域融合计算:未来博泰车联网将进一步融合智驾域
1.4.3 座舱域+车身域多域融合计算:吉利
1.5 多域融合计算思路四
1.5.1 比亚迪云辇车身控制系统
1.5.2 底盘域+智驾域多域融合计算(1)
1.5.3 底盘域+智驾域多域融合计算(2)
1.5.4 底盘域+智驾域多域融合计算(3)
1.5.5 底盘域+智驾域多域融合计算(4)
1.5.6 底盘域+智驾域多域融合计算(5)
1.6 多域融合计算思路五
1.6.1 经纬恒润中央计算平台
1.6.2 博泰车联网中央计算平台
02 多域计算关键技术
2.1 多域融合计算SoC
2.1.1 跨域融合促使芯片厂与OEM/Tier 1合作更加紧密
2.1.2 芯片厂发力重点:多域计算SoC
2.1.3 芯片厂商多域计算SoC产品解决方案(1)
2.1.4 芯片厂商多域计算SoC产品解决方案(2)
2.1.5 芯片厂商多域计算SoC产品解决方案(3)
2.1.6 多域融合计算趋势:单SoC层面的一体化
2.1.7 单SoC案例一:高通集成式超级计算级别的汽车SoC(1)
2.1.8 单SoC案例一:高通集成式超级计算级别的汽车SoC(2)
2.1.9 单SoC案例一:高通基于单SoC的驾舱融合
2.1.10 单SoC案例二:英伟达Thor(1)
2.1.11 单SoC案例二:英伟达Thor(2)
2.1.12 单SoC案例二:英伟达Thor(3)
2.1.13 单SoC案例三:黑芝麻智能在多域计算SoC的布局
2.1.14 单SoC案例三:黑芝麻车规级跨域多功能融合计算芯片C1200(1)
2.1.15 单SoC案例三:黑芝麻车规级跨域多功能融合计算芯片C1200(2)
2.1.16 单SoC案例四:地平线在多域计算SoC的布局
2.1.17 单SoC案例四:零跑两颗芯片融合四域
2.1.18 多域多SoC计算方案(1)
2.1.19 多域多SoC计算方案(2)
2.1.20 多域多SoC计算方案(3)
2.2 多域计算软件OS
2.2.1 中央集中架构发展促进软硬件解耦(1)
2.2.2 中央集中架构发展促进软硬件解耦(2)
2.2.3 汽车计算平台架构
2.2.4 多域计算软件发展重点:统一的软件架构平台
2.2.5 软件平台架构案例一
2.2.6 软件平台架构案例二
2.2.7 软件平台架构案例三
2.2.8 E/E架构演进对OS系统的需求变化
2.2.9 多域软件OS发展趋势:向整车级OS演进
2.2.10 整车级OS(1)
2.2.11 整车级OS(2)
2.2.12 整车级OS架构
2.2.13 多域计算OS案例一
2.2.14 多域计算OS案例一
2.2.15 多域计算OS案例二
2.2.16 多域计算OS案例三
2.2.17 多域计算OS案例四
2.2.18 多域计算OS案例五
2.3 多域计算通信:以太网
2.3.1 多域计算趋势下通信架构由CAN/LIN总线向以太网发展(1)
2.3.2 多域计算趋势下通信架构由CAN/LIN总线向以太网发展(2)
2.3.3 Zonal架构的关键:新一代以太网技术TSN
2.3.4 Zonal架构的关键:新一代以太网技术TSN优势
2.3.5 整车跨域以太网部署案例一
2.3.6 整车跨域以太网部署案例二
2.3.7 整车跨域以太网部署案例二
2.3.8 OEM通信架构升级:以太网+高速网关服务器
2.4 多域计算通信:网关
2.4.1 目前已实现车身域控与网关融合
2.4.2 集成案例一
2.4.3 集成案例二
2.4.4 车身域集成网关的发展
2.5 区域控制器
2.5.1 区域控制器在电子电气架构中的定位
2.5.2 区域控制器介绍
2.5.3 区域控制器典型布置方案和功能分配
2.5.4 区域控制器三大功能:整车区域配电中心(1)
2.5.5 区域控制器三大功能:整车区域配电中心(2)
2.5.6 区域控制器三大功能:整车区域通信中心
2.5.7 区域控制器三大功能:区域功能与驱动中心
2.5.8 区域控制架构优势一
2.5.9 区域控制架构优势二
2.5.10 华为iDVP硬件架构
2.5.11 OEM区域控制器数量和功能情况
2.5.12 Tier1供应商区域控制器解决方案
2.5.13 案例一:联合电子区域控制器产品(1)
2.5.14 案例一:联合电子区域控制器产品(2)
2.5.15 案例二
2.5.16 案例三
03 主机厂多域计算和区域控制器技术布局
3.1 主机厂多域融合发展规划
3.1.1 2024年会成为跨域(中央计算+区域控制器)元年
3.1.2 主机厂多域融合发展规划
3.1.3 国内OEM主机厂(准)中央计算+区控制器方案总结(1)
3.1.4 国内OEM主机厂(准)中央计算+区控制器方案总结(2)
3.1.5 国内OEM主机厂(准)中央计算+区控制器方案总结(3)
3.1.6 国外OEM主机厂(准)中央计算+区控制器方案总结
3.1.7 多域融合发展可提升OEM竞争力
3.1.8 OEM主机厂多域融合的侧重点(1)
3.1.9 OEM主机厂多域融合的侧重点(2)
3.2 吉利汽车
3.2.1 吉利多域计算硬件布局:黑芝麻智能与吉咖智能合作参与亿咖通中央计算平台项目
3.2.2 吉利多域计算软件布局:SOA软件服务架构
3.2.3 吉利多域计算软件布局:吉利银河OS跨域融合操作系统
3.2.4 吉利多域计算软件布局:ZEEKR EE 3.0中央计算平台(1)
3.2.4 吉利多域计算软件布局:ZEEKR EE 3.0中央计算平台(2)
3.3 上汽
3.3.1 上汽多域计算布局:全域运动控制平台VMC(1)
3.3.2 上汽多域计算技术布局:全域运动控制平台VMC(2)
3.3.3 上汽多域计算布局:舱驾融合(1)
3.3.4 上汽多域计算布局:舱驾融合(2)
3.3.5 上汽零束多域计算布局:SOA软件平台(1)
3.3.6 上汽零束多域计算布局:SOA软件平台(2)
3.4 广汽
3.4.1 广汽多域计算布局:GA3.0“星灵架构”
3.4.2 广汽多域计算布局:SOA软件平台
3.5 长城汽车
3.5.1 长城向(准)中央多域融合计算+区域控制架构演进
3.5.2 长城GEEP 4.0准中央多域计算布局:3个计算平台+3个区控制器
3.5.3 长城GEEP 5.0中央计算平台:中央大脑(one brain)+区控制器
3.6 一汽红旗
3.6.1 一汽红旗FEEA3.0多域计算布局:智控、智享、智驾三大平台
3.6.2 一汽红旗FEEA3.0多域计算布局:TSN以太网多域控制器
3.7 比亚迪
3.7.1 比亚迪多域计算布局:“易四方”系统
3.7.2 比亚迪多域计算布局:高阶智能辅助驾驶“天神之眼”
3.7.3 比亚迪多域计算布局:自研大算力平台
3.8 长安汽车
3.8.1 长安CIIA 2.0多域计算布局:整车控制域(1)
3.8.2 长安CIIA 2.0多域计算布局:整车控制域(2)
3.8.3 长安CIIA 2.0多域计算布局:SDA架构
3.9 理想汽车
3.9.1 理想多域融合计算向中央集中架构迭代
3.9.2 理想LEEA 2.0多域计算布局:L9中央域控制器(XCU)
3.9.3 理想LEEA 3.0中央集中计算布局:CCU(3个计算群)+区域控制器
3.9.4 理想LEEA 3.0中央集中计算布局:区域控制器
3.9.5 理想LEEA 3.0中央集中计算布局:通过PCIe Switch和TSN Switch连接
3.10 小鹏汽车
3.10.1 小鹏汽车向多域计算+区域控制器演进
3.10.2 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
3.10.3 小鹏X-EEA 3.0多域计算布局:中央超算平台架构
3.10.4 小鹏X-EEA 3.0多域计算布局:中央计算域和智驾域软件架构
3.11 蔚来汽车
3.11.1 蔚来多域计算布局:向中央计算演进
3.11.2 蔚来多域计算布局:互联中央网关LION融合车身域
3.11.3 蔚来多域计算布局:智能底盘域控制器ICC与智驾域跨域融合(1)
3.12 哪吒汽车
3.12.1 哪吒向多域融合计算和中央计算演进
3.12.2 哪吒多域融合计算布局:自研中央计算平台
3.12.3 哪吒多域融合计算布局:面向舱驾一体的超算平台
3.13 零跑汽车
3.13.1 零跑汽车发布【四叶草】中央集成式电子电气架构
3.13.2 零跑汽车【四叶草】中央集成式电子电气架构采用SOC+MCU方案
3.13.3 零跑汽车中央集成式电子电气架构实现整车成本70%的自研自造能力
3.14 大众汽车
3.14.1 大众多域计算布局:ICAS1车辆控制域
3.14.2 大众多域计算布局:ICAS3驾舱域控制器功能体系
3.14.3 大众多域计算布局:ICAS3驾舱域控制器系统架构
3.14.4 大众多域计算布局:ICAS3驾舱域控制器域扩展与域融合
04 国内Tier1多域计算和区域控制器技术布局
4.1 东软睿驰
4.1.1 东软睿驰多域计算产品:与联合电子共同研发跨域中央计算单元
4.1.2 东软睿驰多域计算产品:跨域融合域控制器 X-Center
4.1.3 东软睿驰多域计算产品:软件开发平台 NeuSAR(1)
4.1.4 东软睿驰多域计算产品:软件开发平台 NeuSAR(2)
4.1.5 东软睿驰多域计算产品:软件应用开发框架 NeuSAR SF(1)
4.1.6 东软睿驰多域计算产品:软件应用开发框架 NeuSAR SF(2)
4.2 德赛西威
4.2.1 德赛西威多域计算布局:向着中央计算平台演进
4.2.2 德赛西威多域计算布局:打造ICP生态圈
4.2.3 德赛西威多域计算产品:Aurora智能计算平台
4.2.4 德赛西威多域计算产品:Aurora智能计算平台主要特点
4.2.5 德赛西威多域计算产品: Aurora智能计算平台存算一体融合
4.2.6 德赛西威多域计算产品:正在研发驾舱融合
4.3 博泰车联网
4.3.1 博泰车联网简介
4.3.2 博泰车联网主要客户
4.3.3 博泰车联网多域融合布局:两条腿走路
4.3.4 博泰车联网多域融合产品:车身域与座舱域融合
4.3.5 博泰车联网多域融合产品:整车中央计算平台
4.3.6 博泰车联网多域融合产品:下一代多域融合智能座舱平台
4.3.7 博泰车联网多域融合产品:打造舱驾一体
4.4 华为
4.4.1 华为CCA架构:VCU中央计算+3-5个VIU区域控制器
4.4.2 华为CCA架构:系统框架和全栈解决方案
4.5 创时智驾
4.5.1 创时智驾技术优势
4.5.2 创时智驾多域融合布局:向舱驾合一演进
4.5.3 创时智驾多域融合产品:舱驾合一域控制器
4.6 联合电子
4.6.1 联合电子产品供应模式
4.6.2 联合电子成立跨域控制业务部
4.6.3 联合电子多域融合方案:HPC+Zone
4.6.4 联合电子多域计算产品:区域控制器&软件平台
4.6.5 联合电子多域计算产品:车载计算平台VCP 1.0
4.6.6 联合电子多域计算产品:扩展型域控制器平台XCU 8.0
4.6.7 联合电子多域计算产品:首款区域控制器采用四区域方案
4.6.8 联合电子多域计算产品:区域控制器技术特点
4.6.9 联合电子多域计算产品:新一代车辆运动融合控制平台VCU8.5(1)
4.6.10 联合电子多域计算产品:新一代车辆运动融合控制平台VCU8.5 (2)
4.6.11 联合电子多域计算产品:新一代车辆运动融合控制平台VCU8.5 (3)
4.6.12 联合电子多域计算产品:新一代车辆运动融合控制平台VCU8.5 (4)
4.7 映驰科技
4.7.1 映驰科技公司介绍
4.7.2 映驰科技多域融合方案:软件平台EMOS(1)
4.7.3 映驰科技多域融合方案:软件平台EMOS(2)
4.7.4 映驰科技多域融合方案:软件平台EMOS(3)
4.7.5 映驰科技多域融合方案:TSN协议栈
4.8 中科创达
4.8.1 中科创达公司介绍
4.8.2 中科创达多域融合布局:计划2024年量产舱驾合一平台
4.8.3 中科创达多域融合产品:智能座舱4.5实现座舱域和辅助驾驶的融合
4.8.4 中科创达多域融合产品:SOA中间件平台
4.8.5 中科创达多域融合产品:计划2023年底推出舱驾融合方案
4.9 诚迈科技
4.9.1 诚迈科技多域计算产品:中央控制域软件平台FusionWise3.0
4.9.2 诚迈科技多域计算产品:跨域融合整车软件计算平台
4.10 经纬恒润
4.10.1 经纬恒润多域融合布局
4.10.2 经纬恒润多域计算产品:中央计算平台
4.10.3 经纬恒润多域计算产品:SOA整车测试
4.11 金脉电子
4.11.1 金脉电子推出前后区域控制器解决方案
05 海外Tier1多域计算和区域控制器技术布局
5.1 博世
5.1.1 博世多域融合计算布局:成立智能驾驶与控制事业部(XC事业部)
5.1.2 博世多域融合计算布局:向着舱驾合一平台演进
5.1.3 博世多域融合计算布局:舱驾合一产品研发路线
5.1.4 博世多域融合计算产品:量产舱泊融合
5.2 大陆
5.2.1 大陆多域融合计算布局:成立中国软件及系统研发中心
5.2.2 大陆多域融合计算布局:向着四域融合HPC演进
5.2.3 大陆多域融合计算产品:第一代和第二代车身HPC
5.2.4 大陆多域融合计算产品:四合一座舱HPC
5.2.5 大陆多域融合计算产品:即插即用的HPC
5.3 采埃孚
5.3.1 采埃孚多域融合计算布局
5.3.2 采埃孚多域融合计算产品:多域功能版本的ProAI高性能计算平台
5.3.3 采埃孚多域融合计算产品:采睿星
5.3.4 采埃孚多域融合计算产品:中国版采睿星
5.3.5 采埃孚多域融合计算产品:车辆运动域控制单元
5.4 安波福
5.4.1 安波福多域融合计算布局:SVA跨域融合架构
5.4.2 安波福SVA架构:结构特点
5.4.3 安波福SVA架构:主要优势
5.4.4 安波福多域融合计算产品:区域控制器PDC
5.4.5 安波福多域融合计算产品:车身域+底盘域融合中央车辆控制器(CVC)
5.5 哈曼
5.5.1 哈曼多域融合计算布局:2024年推出多域混合架构
5.5.2 哈曼多域计算产品:功能域控制器+区域控制器(1)
5.5.3 哈曼多域计算产品:功能域控制器+区域控制器(2)
5.5.4 哈曼多域融合计算产品:舱驾合一
5.5.5 哈曼多域融合计算产品:舱驾合一底层硬件架构
5.6 LG电子
5.6.1 LG电子与高通、麦格纳合作布局多域融合