从发展趋势看,汽车E/E架构最终会向中央计算架构演进,将功能逻辑集中到1个中央控制器。主机厂E/E架构规划愈发激进,2023-2026年将是主机厂量产下一代“准中央+区域架构”的关键时间节点。
未来5-10年汽车E/E架构演变趋势

来源:佐思汽研《2023年智能汽车E/E架构研究报告》
“准中央+区域”架构可进一步细分为多种类型:
•车身区域架构(Body-Zonal) :车身区域控制器通过高速以太骨干网络连接到中央计算单元,中央计算单元融合整车控制、车身控制、网关等功能,简化网络拓扑、线束布置和减轻重量;
•X域区域架构(X-Domain Zonal) :功能域与车身区域相结合,X域区域使用更强大的处理器单元,能够独立调用区域内的传感器并进行处理;
•软件定义汽车优化架构(SDV-Optimized):集中式、面向服务(SOA)的计算,汽车中央计算机具备强大的处理能力,将所有决策集中于中央计算机,区域控制器则负责供电以及执行中央控制单元的指令。
NXP全新电子电气架构发展路径
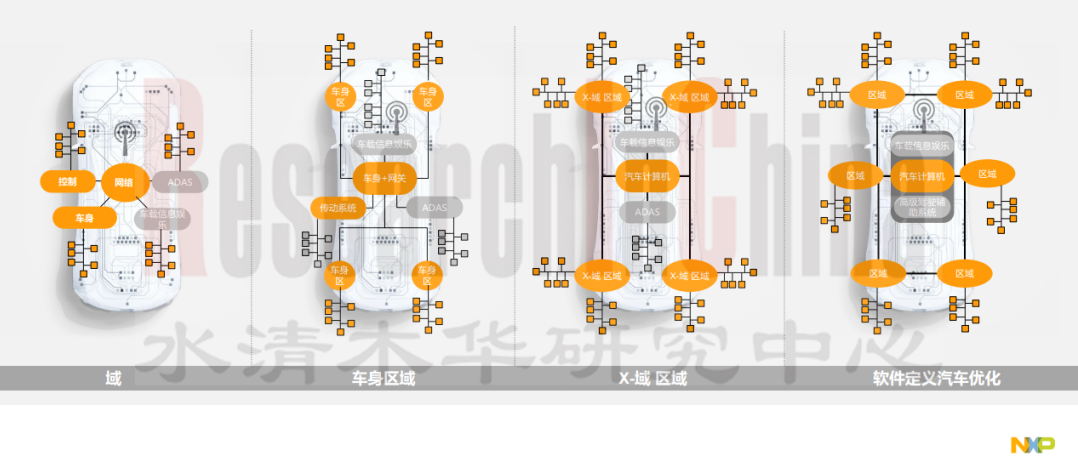
来源:恩智浦
区域架构下,MCU向高性能、多核发展
在未来的中央集成EE架构中,中央处理单元和区域控制器通过以太网进行通信,区域控制器则通过CAN/LIN总线和子ECU,传感器以及执行器通信。
在物理上,区域控制器是多个ECU的逻辑集中点,这对于区域控制器中MCU的算力有了更高的需求。在传统功能单一的ECU中往往使用性能较低的单核MCU即可满足要求,而对于区域控制器,往往需要高性能的多核MCU才能满足要求。在多核MCU中每个核可以跑一种单独功能,多核即可实现多种功能,从而实现多种ECU功能的融合。
•广汽埃安GA3.0星灵架构:新上市的Hyper GT(昊铂)是全球首款采用恩智浦S32G3作为中央计算单元处理器的车型,“中央运算单元” 采用最新一代 “NXP S32G399高性能网关计算芯片”,“中央运算单元” 由大陆集团负责开发,前、后区域控制器的软件架构基础中间层采用原子服务封装和标准化接口,中间层采用增强型组合服务,可独立执行。
广汽埃安GA3.0星灵架构拓扑
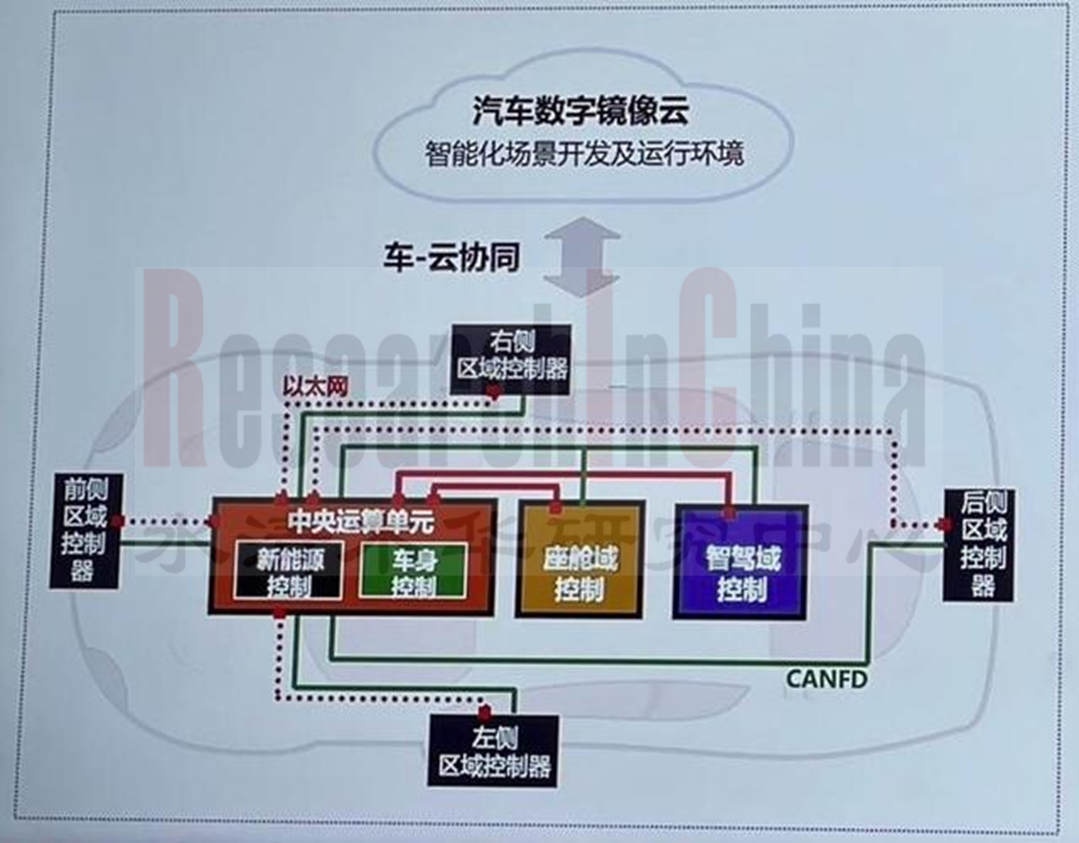
来源:广汽埃安
•小鹏汽车 X-EEA3.0 架构:在国内首次实现了以千兆以太网为主干的通信架构,同时支持多通讯协议,让车辆在数据传输方面更快速。X-EEA3.0的区域控制器和中央计算单元均采用了瑞萨基于第三代RXv3 CPU内核的旗舰 MCU。在X-EEA3.0基础上,小鹏G6进一步量产部署新的扶摇X-EEA3.5架构。
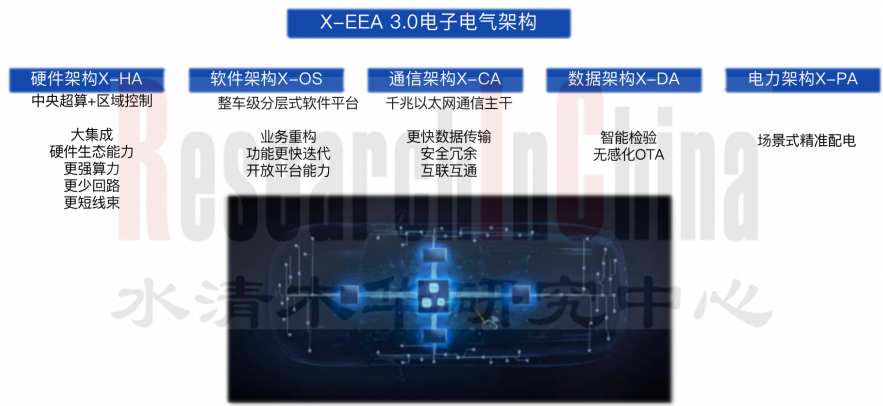
来源:小鹏汽车
•英飞凌第3代AURIX™产品TC4xx MCU:高性能AURIX™ TC4xx系列,主要满足中央计算+区域控制的新需求。搭载了多达六个TriCore™ 1.8嵌入式内核,每个内核的时钟频率最高可达500MHz,并且集成一个PPU协处理器,可实现快速向量运算,基础神经网络算法以及其它一些复杂数学算法。PPU在未来的区域控制器中可以被应用于建模,模型预测控制以及防入侵检测等一些信息安全算法中。
英飞凌TC4xx的应用领域
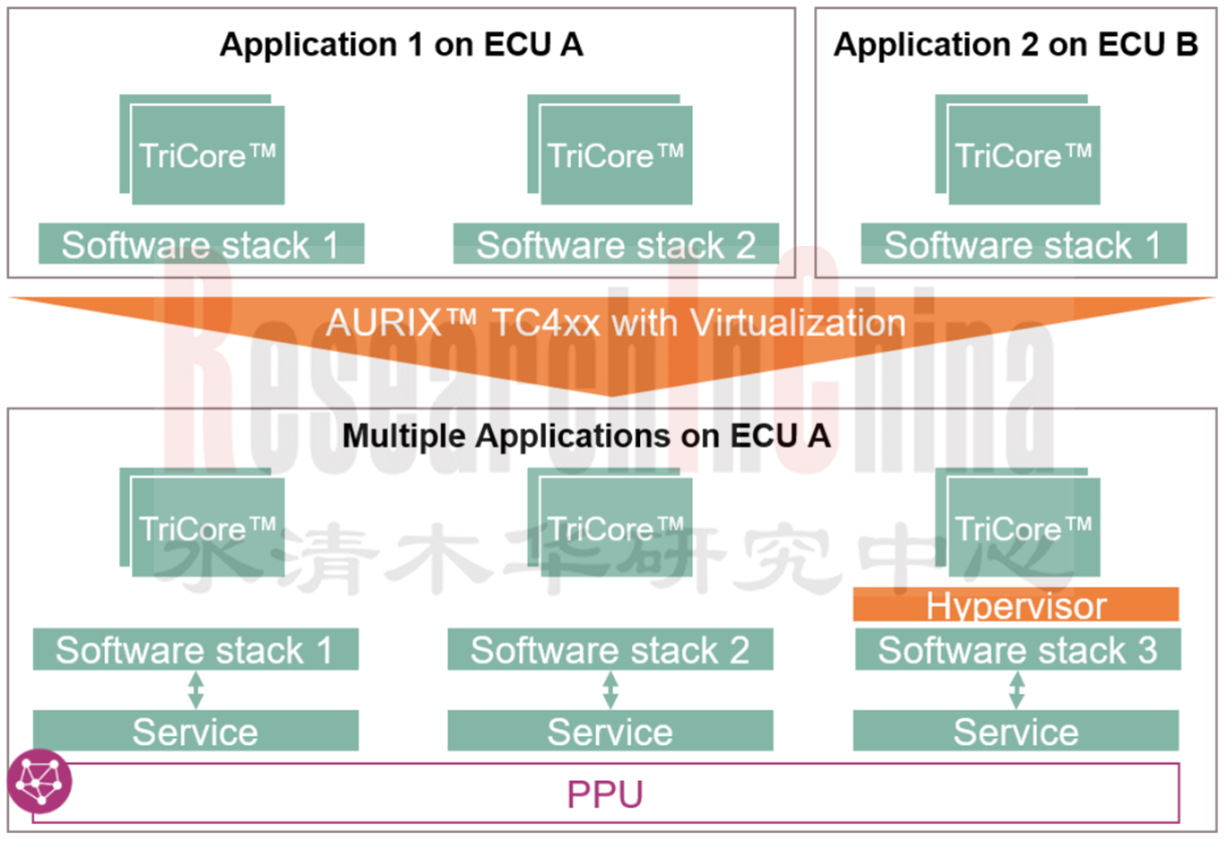
来源:英飞凌
区域架构下,汽车以太网PHY和交换机芯片需求猛增,价格呈现剧烈波动
车载以太网的接口电路主要由MAC控制器和物理层接口PHY芯片两大部分构成。集成方式上,嵌入式芯片厂商一般会将MAC集成在MCU/CPU内部, 如英飞凌的AURIX产品将MAC集成到了主控芯片MCU内部,还集成了专用的硬件通讯路由模块CRE/DRE;而PHY芯片则由OEM或控制器供应商提供独立芯片。
2023年全球以太网交换机/物理层PHY芯片市场规模大约8亿美元,2028年预计将达到25亿美元。预计到2028年,平均每辆车使用2-4片以太网交换机芯片,2-4片物理层PHY芯片。
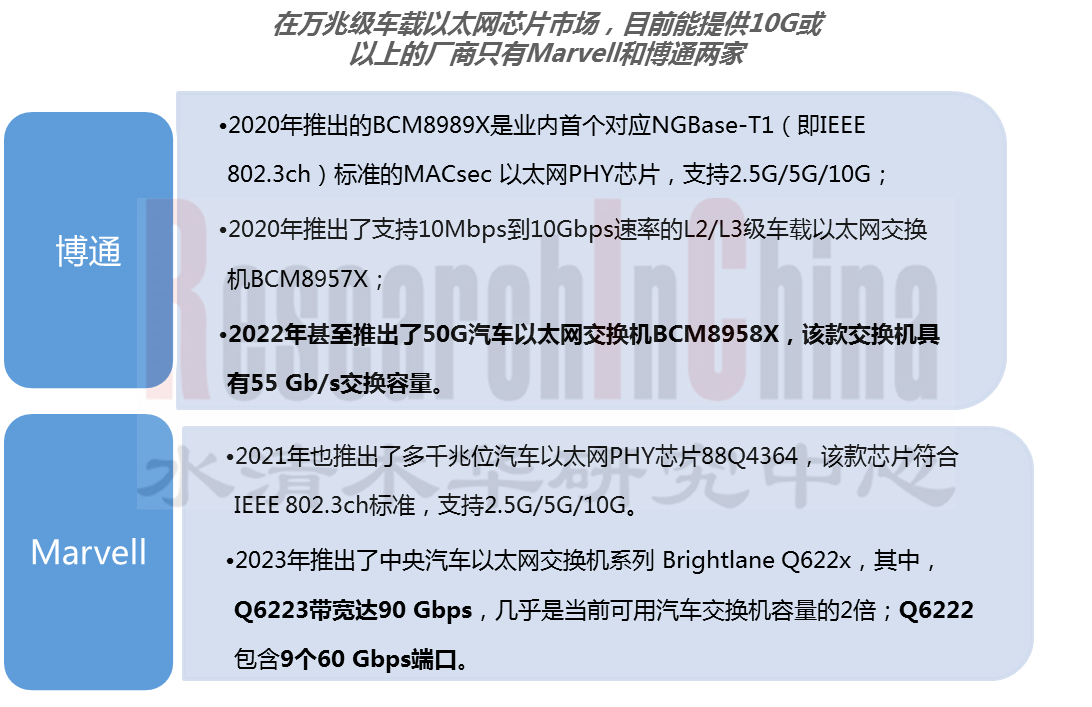
2023年以来,博通BCM89系列部分以太网PHY和交换机芯片短期价格暴涨数倍,单颗芯片高达30-40美金;BCM8955X系列是博通第三代车载以太网交换机,主要应用于汽车ADAS、信息娱乐系统、网关;目前,博通主推BCM8957X系列,BCM8957X是全球唯一支持802.3ch标准的车载以太网交换机。
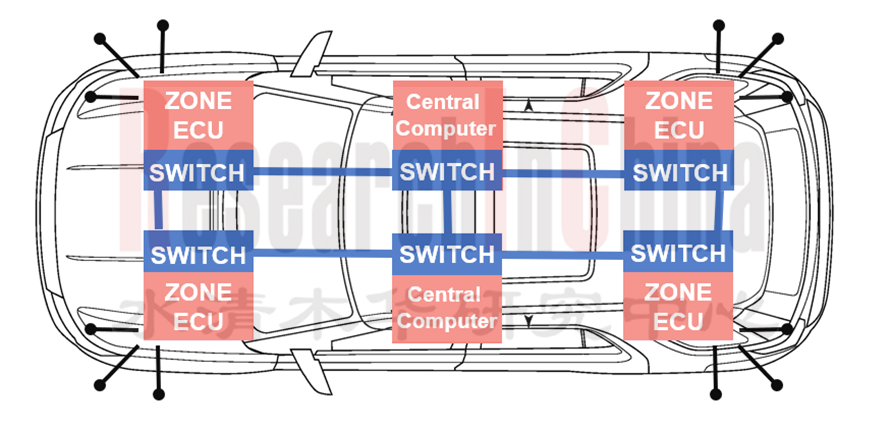
典型的中央计算Zonal架构,每个Zonal网关内部都包含一个以太网交换机,每辆车至少需要6-7片以太网交换机芯片。目前,Marvell、博通、恩智浦等车载网络通信芯片厂商纷纷提出下一代网络架构。
来源:Marvell
按照主机厂的预测,想要在2025年实现中央计算Zonal架构,10G的带宽是必不可少的需求。2023年6月,Marvell推出了Brightlane Q622x系列中央汽车以太网交换机,是专门为汽车Zonal架构而设计。其中区域交换机将来自汽车物理区域内的设备(如处理器、传感器、执行器和存储系统等)的流量聚合到一起,通过高速以太网连接至中央计算交换机实现信息交互。
来源:佐思汽研《2023年智能汽车E/E架构研究报告》
区域架构下,中央计算机片内高速通信需要PCIe交换机支撑
受到Chat GPT推动,AI服务器需求暴涨,以博通SS26为代表的PCIe Switch芯片一芯难求,价格暴涨;在下一代汽车E/E架构中,多SoC级联、 基于PCIe的SSD存储与中央SoC之间,同样必须用到昂贵的PCIe交换机。
E/E架构演进下,车载通信架构的发展
来源:小鹏汽车
汽车跨域通信将以PCIe为主,相比过去的以太网通信效率可提升到几十个G,PCIe Switch串联起整个片内通信。中央计算单元中的不同SoC,Ethernet Switch等均挂载其上面。外部传感器通过Zonal ECU的Ethernet Switch串联在一起。
•高通第一代自动驾驶系统即Ride3.0首次在汽车行业使用了PCIe交换机,即Microchip的PM43028B1-F3EI,售价约100美元,比SA8155P的价格还高,几乎是以太网交换机价格的4-5倍;
•伟世通双高通8155座舱域控制器内部通过PCIe总线连接,两颗8155通过PCIe总线进行连接,传输速率可达16Gbps,可高效传输ADAS驾驶辅助系统摄像头输入视频的实时传输需求;
•芯擎为亿咖通定制的高速互联总线SE-LINK实现两颗龍鷹一号同时工作,连接两个Antora 1000,得到Antora 1000 Pro。可提供双倍算力同时保持传输速度,其中PCIe 3.0 Lane传输速度实测达到了7.28GT/s。
整车EE架构演进,驱动汽车底层OS变革
•Adaptive AUTOSAR引入了面向服务的架构(SOA),以及对POSIX系统的支持,主要应用于高算力SoC。SOA或者基于服务的中间件平台,也称为整车操作系统OS。
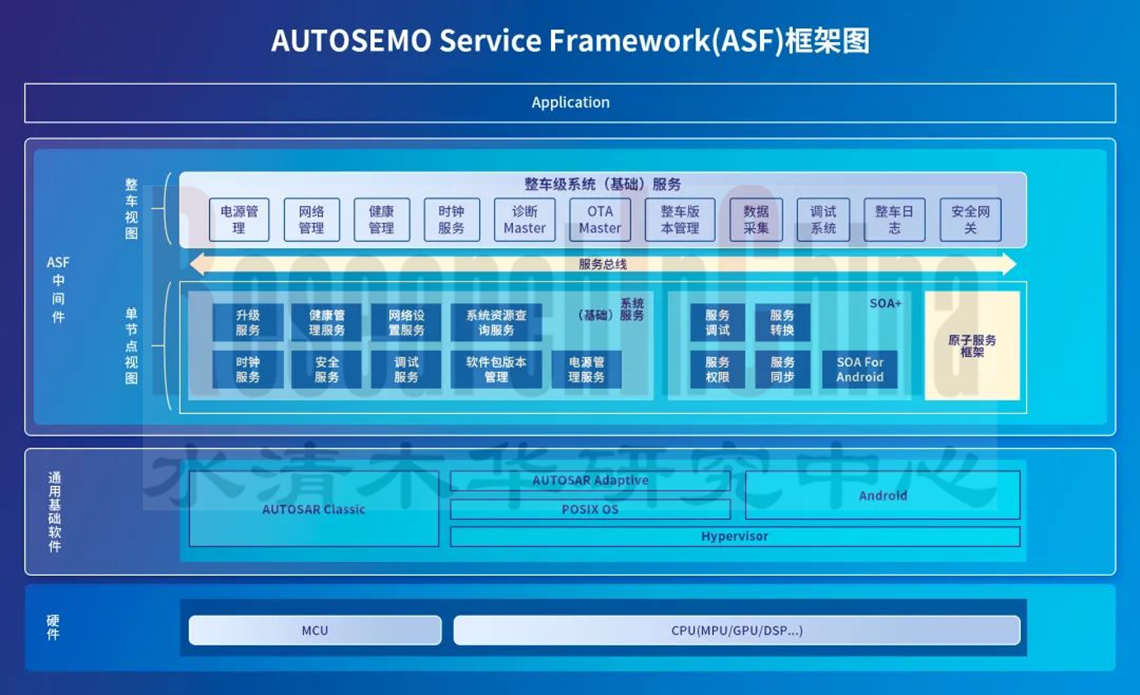
•广汽星灵架构的SOA软件架构,通过分层解耦的基础软件架构平台,实现了标准化分层接口、软件模块化、功能原子化、功能远程配置等。广汽星灵架构是国内首款基于ASF(AUTOSEMO Service Framework)技术规范开发的产品,基于SOA软件架构,广汽埃安Hyper GT首发量产了广汽魔方场景共创平台。
ASF致力于构建多域融合架构下的应用框架
来源:AUTOSEMO
•2023年4月,华为发布了iDVP智能数字底座,这是一套可以满足区域接入+中央计算标准的SOA架构。iDVP包含硬件平台和软件平台两部分,其中,硬件平台是指计算与通信架构基础硬件平台,软件平台又分为操作系统、基础管理框架以及SOA软件框架。为方便用户在iDVP上开发软件,华为还开发了配套的工具链。
华为iDVP智能数字底座
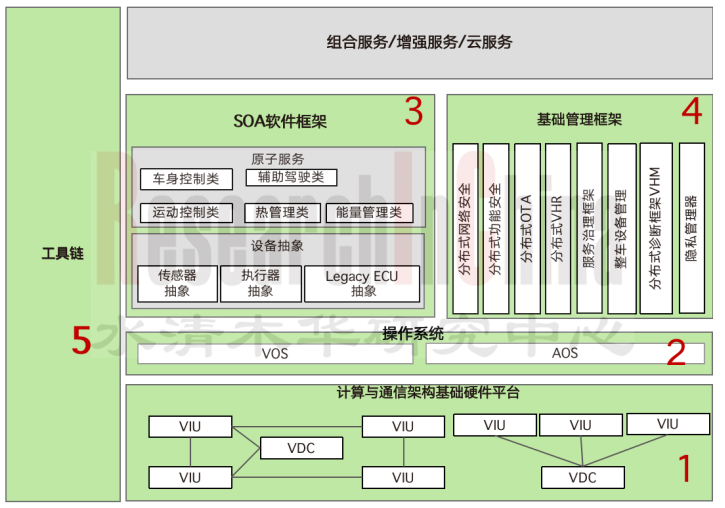
来源:华为
01 E/E架构升级趋势和主机厂方案汇总
1.1 汽车电子电气架构演进
1.1.1 汽车E/E架构演进:从分布式到集中式
1.1.2 汽车E/E架构演进:汽车价值链重构
1.1.3 汽车E/E架构演进:升级的四个维度
1.1.4 汽车E/E架构演进:未来十年的汽车E/E架构演变趋势
1.1.5 建立下一代E/E架构的关键技术要素
1.1.6 建立下一代E/E架构的核心要素和特点(1)
1.1.7 建立下一代E/E架构的核心要素和特点(2)
1.1.8 下一代Zonal EEA演进的三个阶段
1.1.9 下一代Zonal EEA演进面临的挑战
1.2 汽车电子电气架构标准化进程
1.2.1 汽车EEA 标准:标准化需求框架
1.2.2 汽车EEA 标准:ISO 26262和GB/T 34590 相关标准
1.2.3 汽车EEA 标准:汽车电子电气架构工作组
1.2.4 汽车EEA 标准:汽车电子电气架构工作组商待解决的问题
1.2.5 汽车EEA 标准:《智能网联汽车电子电气架构产业技术路线图》(1)
1.2.6 汽车EEA 标准:《智能网联汽车电子电气架构产业技术路线图》(2)
1.2.7 团体标准:《智能网联汽车用数据分发服务(DDS)测试方法》
1.2.8 团体标准:《智能网联汽车用数据分发服务(DDS)测试方法》
1.2.9 团体标准:《汽车以太网交换机设备安全技术要求》
1.2.10 团体标准:《车载时间敏感网络中间件技术要求》
1.2.11 团体标准:星闪Release 1.0(1)
1.2.12 团体标准:星闪Release 1.0(2)
1.2.13 团体标准:星闪Release 1.0(3)
1.2.14 团体标准:星闪Release 1.0(4)
1.2.15 SDV工作组:《软件定义汽车服务API参考规范》2.0
1.2.16 SDV工作组:《软件定义汽车服务API参考规范》发布计划表
1.2.17 SDV工作组:原子服务API 工作进展
1.2.18 ASF工作组:推进ASF(AUTOSEMO Service Framework)技术规范
1.2.19 ASF工作组:ASF致力于构建多域融合架构下的应用框架
1.2.20 ASF工作组:广汽星灵架构基于AFS量产落地,实现软硬件分层解耦
1.3 OEM主机厂E/E架构升级方案汇总
1.3.1 主机厂汽车电子电气架构布局情况(1)
1.3.2 主机厂汽车电子电气架构布局情况(2)
1.3.3 主机厂E/E架构升级方案和供应链汇总(1)
1.3.4 主机厂E/E架构升级方案和供应链汇总(2)
1.3.5 主机厂E/E架构升级方案和供应链汇总(3)
1.3.6 主机厂E/E架构升级方案和供应链汇总(4)
1.3.7 主机厂E/E架构升级方案和供应链汇总(5)
1.3.8 主机厂E/E架构升级方案和供应链汇总(6)
1.3.9 主机厂E/E架构升级方案和供应链汇总(7)
1.3.10 主机厂E/E架构升级方案和供应链汇总(8)
02 造车新势力的电子电气架构
2.1 特斯拉
2.1.1 特斯拉E/E架构演进
2.1.2 特斯拉第一代域架构:Model S EEA拓扑
2.1.3 特斯拉第一代域架构:Model X EEA拓扑
2.1.4 特斯拉第二代准中央架构:Model 3 EEA拓扑(1)
2.1.5 特斯拉第二代准中央架构:Model 3 EEA拓扑(2)
2.1.6 特斯拉第二代准中央架构:Model 3 EEA拓扑(3)
2.1.7 特斯拉EEA关键技术(自动驾驶):FSD HW1.0—HW4.0域控制器参数演进
2.1.8 特斯拉EEA关键技术(自动驾驶):HW 4.0主芯片技术升级
2.1.9 特斯拉EEA关键技术(自动驾驶):HW 4.0主芯片算力翻三倍,首发使用GDDR6
2.1.10 特斯拉EEA关键技术(自动驾驶):HW 4.0搭载Phoenix 4D毫米波雷达
2.1.11 特斯拉EEA关键技术(自动驾驶):HW 4.0主摄(前视)三目变双目视觉,增加三颗摄像头
2.1.12 特斯拉EEA关键技术(自动驾驶):HW3.0 AP电路板
2.1.13 特斯拉EEA关键技术(智能座舱):MCU4.0信息娱乐控制单元
2.1.14 特斯拉EEA关键技术(智能座舱):MCU3.0信息娱乐控制单元
2.1.15 特斯拉EEA关键技术(智能座舱):MCU3.0信息娱乐控制单元
2.1.16 特斯拉EEA关键技术(智能座舱):MCU3.0信息娱乐控制单元
2.1.17 特斯拉EEA关键技术(智能座舱):MCU2.0信息娱乐控制单元
2.1.18 特斯拉EEA关键技术(电源架构):全面转向48V低压电架构
2.1.19 特斯拉EEA关键技术(电源架构):全面转向48V低压电架构
2.1.20 特斯拉EEA关键技术(电源架构):全面转向48V低压电架构
2.1.21 特斯拉EEA关键技术(电源架构):Model 3区域智能配电设计
2.1.22 特斯拉EEA关键技术(电源架构):Model 3区域智能配电设计
2.1.23 特斯拉EEA关键技术(电源架构):Model 3区域智能配电设计
2.1.24 特斯拉EEA关键技术(区域控制器):Model 3车身控制区域划分
2.1.25 特斯拉EEA关键技术(区域控制器):Model 3车身区域控制器位置分布
2.1.26 特斯拉EEA关键技术(区域控制器):Model 3前车身区域(1)
2.1.27 特斯拉EEA关键技术(区域控制器):Model 3前车身区域(2)
2.1.28 特斯拉EEA关键技术(区域控制器):Model 3左、右车身区域(1)
2.1.29 特斯拉EEA关键技术(区域控制器):Model 3左、右车身区域(2)
2.1.30 特斯拉EEA关键技术(区域控制器):Model 3区域控制器技术特征总结
2.1.31 特斯拉EEA关键技术(区域控制器):Model Y第三代车身控制器
2.1.32 特斯拉EEA关键技术(区域控制器):Model S Plaid第四代车身控制器
2.2 小鹏
2.2.1 小鹏汽车EEA演进:技术路线
2.2.2 小鹏X-EEA 2.0:小鹏P7的域控架构
2.2.3 小鹏X-EEA 2.0:P7智驾软硬件架构
2.2.4 小鹏发布SEPA 2.0扶摇架构
2.2.5 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
2.2.6 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
2.2.7 小鹏X-EEA 3.0:硬件、通信和电力架构
2.2.8 小鹏X-EEA 3.0:中央超算(3个计算群)软硬件拓扑
2.2.9 小鹏X-EEA3.0 关键技术(中央超算):中央超算平台C-DCU系统拓扑
2.2.10 小鹏X-EEA3.0 关键技术(中央超算):中央超算平台C-DCU域软件架构
2.2.11 小鹏X-EEA3.0 关键技术(智驾域控XPU):XPU规划路线图
2.2.12 小鹏X-EEA3.0 关键技术(智驾域控XPU):XPU智驾域软件架构
2.2.13 小鹏X-EEA3.0 关键技术(通信架构):以太网+CAN-FD跨域通信架构
2.2.14 小鹏X-EEA3.0 关键技术(区域控制器):区域控制器ZCU&VIU
2.2.15 小鹏X-EEA3.0 关键技术(软件架构):SOA软件架构(1)
2.2.16 小鹏X-EEA3.0 关键技术(软件架构):SOA软件架构(2)
2.2.17 小鹏X-EEA3.0 关键技术(软件架构):SOA软件架构(3)
2.2.18 小鹏X-EEA3.0 关键技术(自动驾驶):规划路线图
2.2.19 小鹏X-EEA3.0 关键技术(自动驾驶):XPILOT 4.0
2.2.20 小鹏X-EEA3.0 关键技术(自动驾驶):XPILOT 4.0(硬件架构)
2.2.21 小鹏X-EEA3.0 关键技术(自动驾驶):XPILOT 4.0(新一代感知架构XNet)
2.2.22 小鹏X-EEA3.0 关键技术(智能座舱):Xmart OS车载智能系统
2.3 蔚来汽车
2.3.1 蔚来汽车EEA演进:技术路线
2.3.2 蔚来NT2 关键技术(平台架构)
2.3.3 蔚来NT2 关键技术(自动驾驶):第二代NIO AD
2.3.4 蔚来NT2 关键技术(自动驾驶):ADAM超算+ AQUILA超感(1)
2.3.5 蔚来NT2 关键技术(自动驾驶):ADAM超算+ AQUILA超感(2)
2.3.6 蔚来NT2 关键技术(智能座舱)
2.3.7 蔚来NT2 关键技术(智能座舱)
2.3.8 蔚来NT2 关键技术(底盘域):智能底盘域控制器ICC(1)
2.3.9 蔚来NT2 关键技术(底盘域):智能底盘域控制器ICC(2)
2.3.10 蔚来NT2 关键技术(底盘域):智能底盘域控制器ICC(3)
2.3.11 蔚来NT2 关键技术(通信架构):互联中央网关LION融合车身域
2.3.12 蔚来正向下一代中央计算架构演进
2.3.13 蔚来下一代EEA:“中央计算+区域控制器”架构拓扑
2.3.14 蔚来下一代EEA:“中央计算+区域控制器”功能特点
2.3.15 蔚来下一代EEA:“中央计算+区域控制器” AMP微核架构(1)
2.3.16 蔚来下一代EEA:“中央计算+区域控制器” AMP微核架构(2)
2.3.17 蔚来下一代EEA:“中央计算+区域控制器” SOA软件
2.3.18 蔚来下一代EEA:“中央计算+区域控制器”跨域功能和融合和隔离
2.4 理想汽车
2.4.1 理想汽车EEA演进:LEEA1.0 – LEEA3.0
2.4.2 理想LEEA2.0 关键技术(自动驾驶):平台演进路线
2.4.3 理想LEEA2.0 关键技术(自动驾驶):AD Max智驾系统
2.4.4 理想LEEA2.0 关键技术(自动驾驶):AD Max3.0
2.4.5 理想LEEA2.0 关键技术(自动驾驶):智驾算法
2.4.6 理想LEEA2.0 关键技术(智能座舱)
2.4.7 理想LEEA2.0 关键技术(车控):中央域控制器(XCU)
2.4.8 理想LEEA 3.0:中央算力平台+4个区域控制器
2.4.9 理想LEEA 3.0:CCU中央计算机
2.4.10 理想LEEA 3.0:CCU中央计算机
2.4.11 理想LEEA 3.0:区域控制器
2.4.12 理想LEEA 3.0:PCIe Switch和TSN Switch
2.4.13 理想LEEA 3.0:多层级服务的定义和部署
2.4.14 理想LEEA 3.0:操作系统LiOS(Li auto OS)
2.5 哪吒汽车
2.5.1 哪吒汽车发布“浩智战略2025”
2.5.2 哪吒汽车“浩智滑板平台”
2.5.3 哪吒汽车“浩智2.0超算系统”
2.5.4 哪吒汽车EEA 发展路线:多域融合计算和中央计算演进
2.5.5 哪吒汽车EEA 关键技术(计算平台):全栈自研浩智中央计算平台(1)
2.5.6 哪吒汽车EEA 关键技术(计算平台):全栈自研浩智中央计算平台(2)
2.5.7 哪吒汽车EEA 关键技术(计算平台):全栈自研浩智中央计算平台(3)
2.5.8 哪吒汽车EEA 关键技术(自动驾驶):发展规划(1)
2.5.9 哪吒汽车EEA 关键技术(自动驾驶):发展规划(2)
2.5.10 哪吒汽车EEA 关键技术(自动驾驶):NETA PILOT 3.0
2.5.11 哪吒汽车EEA 关键技术(自动驾驶):NETA PILOT 4.0
2.5.12 哪吒汽车EEA 关键技术(动力车身域):动力域控PDCS——融合网关域控HPC
2.6 零跑汽车
2.6.1 零跑电子电气架构向中央计算平台演进
2.6.2 零跑汽车Leap2.0 EEA:域控制式电子电气架构
2.6.3 零跑汽车Leap3.0 EEA:“四叶草”中央集成式架构
2.6.4 零跑汽车Leap3.0“四叶草”中央集成式EEA:系统拓扑
2.6.5 零跑汽车Leap3.0“四叶草”中央集成式EEA:计算平台配置策略
2.6.6 零跑汽车Leap3.0“四叶草”中央集成式EEA:实现整车成本70%的自研自造能力
2.6.7 零跑汽车Leap3.0“四叶草”中央集成式EEA:中央超算平台实现“四域合一”
2.6.8 零跑汽车Leap3.0“四叶草”中央集成式EEA:提供四种技术输出合作模式
2.7 岚图汽车
2.7.1 岚图汽车中央集中式EEA:ESSA+SOA 架构
2.7.2 岚图汽车中央集中式EEA:中央控制器OIB
2.7.3 岚图汽车中央集中式EEA:区域控制器VIU
2.7.4 岚图汽车中央集中式EEA:车联网终端T-box
2.7.5 岚图汽车中央集中式EEA:系统拓扑
2.7.6 岚图汽车中央集中式EEA:物理架构
2.7.7 岚图汽车EEA中央集中式:SOA软件架构(1)
2.7.8 岚图汽车中央集中式EEA:SOA软件架构(2)
2.7.9 岚图汽车中央集中式EEA:网络和通信架构
2.7.10 岚图汽车中央集中式EEA:安全架构
2.8 华人运通
2.8.1 华人运通 HOA架构
2.8.2 华人运通 HOA架构:系统拓扑
2.8.3 华人运通HOA EEA关键技术(自动驾驶):HiPhi Polit
2.8.4 华人运通HOA EEA关键技术(自动驾驶):HiPhi Polit
2.8.5 华人运通HOA EEA关键技术(智能座舱):HiPhi Bot
2.8.6 华人运通HOA EEA关键技术(SOA架构):HiPhi Play
2.9 极氪汽车
2.9.1 ZEEKR(极氪)EEA演进:EE 2.0 — EE 3.0
2.9.2 吉利ZEEKR EE 2.0功能域架构
2.9.3 吉利ZEEKR EE 3.0中央计算架构:1个中央计算机搭配2个区控制器
2.9.4 吉利ZEEKR EE 3.0中央计算架构:中央超算平台
2.9.5 吉利ZEEKR EEA关键技术(自动驾驶):ZAD智能驾驶辅助系统
2.9.6 吉利ZEEKR EEA关键技术(智能座舱):ZEEKR OS(1)
2.9.7 吉利ZEEKR EEA关键技术(智能座舱):ZEEKR OS(2)
2.9.8 吉利ZEEKR EEA关键技术(软件架构):产业链生态OTA解决方案
2.9.9 吉利ZEEKR EEA关键技术(软件架构):极氪自研OTA方案
2.9.10 吉利ZEEKR EEA关键技术(软件架构):极氪自研OTA软件功能模块
2.9.11 吉利ZEEKR EEA关键技术(软件架构):OTA云管端信息安全防护
2.9.12 吉利ZEEKR EEA关键技术(电源架构):智能配电设计(1)
2.9.13 吉利ZEEKR EEA关键技术(电源架构):智能配电设计(2)
2.10 智己汽车
2.10.1 上汽智己EEA布局:软件、硬件、通信架构
2.10.2 上汽智己EEA(关键技术):智能座舱
2.10.3 上汽智己EEA(关键技术):IM AD智能驾驶系统演进
2.11 极狐汽车
2.11.1 极狐汽车EEA演进:技术路线
2.11.2 ARCFOX极狐 BE21 EEA架构
2.11.3 ARCFOX极狐 IMC EEA架构
03 自主品牌OEM的电子电气架构
3.1 吉利汽车
3.1.1 吉利汽车EEA演进:技术路线
3.1.2 吉利汽车GEEA 3.0中央计算平台架构
3.1.3 吉利GEEA3.0 EEA系统开发:架构特征
3.1.4 吉利GEEA3.0 EEA系统开发:中央计算电子架构-GEEA3.0
3.1.5 吉利GEEA3.0 EEA系统开发:基于SOA的操作系统- GeelyOS
3.1.6 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计工具链改造
3.1.7 吉利GEEA3.0 EEA系统开发:PMT-SOA软件资产转化和复用方案
3.1.8 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计方法论
3.1.9 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计规范
3.1.10 吉利GEEA3.0 EEA系统开发:GOS-多协议多OS兼容
3.1.11 吉利GEEA3.0 EEA系统开发:开发者平台和工具链
3.1.12 吉利GEEA3.0 EEA系统开发:持续迭代的敏捷开发
3.1.13 吉利EEA关键技术(智能座舱):银河NOS系统
3.1.14 吉利EEA关键技术(软件):SOA软件服务架构
3.1.15 吉利EEA关键技术(芯片):芯擎座舱和自动驾驶SoC
3.1.16 吉利EEA关键技术(计算平台):亿咖通中央计算平台 Super Brain
3.2 长城汽车
3.2.1 长城汽车EEA演进:技术路线
3.2.2 长城汽车GEEP 4.0准中央EEA:3个计算平台+3个区域控制器
3.2.3 长城汽车GEEP 4.0准中央EEA:3个计算平台+3个区域控制器
3.2.4 长城汽车GEEP 4.0准中央EEA:中央计算单元CCU
3.2.5 长城汽车GEEP 4.0准中央EEA:区域控制器VIU
3.2.6 长城汽车GEEP 4.0准中央EEA:SOA软件框架(1)
3.2.7 长城汽车GEEP 4.0准中央EEA:SOA软件框架(2)
3.2.8 长城汽车GEEP 4.0准中央EEA:全栈式安全保障
3.2.9 长城汽车GEEP 4.0准中央EEA:架构特点总结
3.2.10 长城汽车GEEP 4.0准中央EEA:量产方案总结
3.2.11 长城汽车GEEP 4.0关键技术(计算平台):“小魔盒3.0”
3.2.12 长城汽车GEEP 4.0关键技术(自动驾驶):咖啡智驾
3.2.13 长城汽车GEEP 4.0关键技术(自动驾驶):咖啡智驾2.0
3.2.14 长城汽车GEEP 4.0关键技术(智能座舱):Coffee OS 2
3.2.15 长城汽车GEEP 5.0中央计算EEA:中央大脑(one brain)+区域控制器
3.3 广汽
3.3.1 广汽EEA演进:技术路线
3.3.2 广汽埃安发布GA3.0星灵架构,首发搭载埃安Hyper GT
3.3.3 广汽埃安GA3.0星灵 EEA:3个计算单元+4个区域控制器
3.3.4 广汽埃安GA3.0星灵 EEA:架构特点
3.3.5 广汽埃安GA3.0星灵 EEA:硬件架构(1)
3.3.6 广汽埃安GA3.0星灵 EEA:硬件架构(2)
3.3.7 广汽埃安GA3.0星灵 EEA关键技术(中央运算单元):车身域控
3.3.8 广汽埃安GA3.0星灵 EEA关键技术(中央运算单元)
3.3.9 广汽埃安GA3.0星灵 EEA关键技术(软件):SOA软件平台
3.3.10 广汽埃安GA3.0星灵 EEA关键技术(软件):用户共创平台
3.3.11 广汽埃安GA3.0星灵 EEA关键技术(软件):广汽普赛OS系统
3.3.12 广汽埃安GA3.0星灵 EEA关键技术(自动驾驶):多融合智驾感知系统
3.3.13 广汽埃安GA3.0星灵 EEA关键技术(自动驾驶):第二代智能可变焦激光雷达
3.3.14 广汽埃安GA3.0星灵 EEA关键技术(自动驾驶):ADiGO PILOT数据闭环平台
3.3.15 广汽埃安GA3.0星灵 EEA关键技术(自动驾驶):红外遥感技术
3.4 比亚迪
3.4.1 比亚迪EEA演进:技术路线
3.4.2 比亚迪e平台 3.0 EEA:系统设计
3.4.3 比亚迪e平台 3.0 EEA:多域计算思路
3.4.4 比亚迪e平台 3.0 EEA:集成式左右车身控制器,进一步向区域控制器演进
3.4.5 比亚迪e平台 3.0 EEA:智能动力域(1)
3.4.6 比亚迪e平台 3.0 EEA:智能动力域(2)
3.4.7 比亚迪下一代EEA:易四方技术平台
3.4.8 比亚迪下一代EEA:“易四方”多域计算+区域控制架构
3.4.9 比亚迪下一代EEA关键技术(自动驾驶):高阶智能辅助驾驶“天神之眼”
3.4.10 比亚迪下一代EEA关键技术(计算平台):自研大算力平台
3.4.11 比亚迪下一代EEA关键技术(车身域):云辇新能源专属智能车身控制系统
3.5 上汽
3.5.1 上汽EEA演进:银河全栈1.0、银河全栈3.0
3.5.2 上汽零束全栈3.0准中央 EEA:2个中央计算单元+4个区域控制器
3.5.3 上汽零束全栈3.0准中央 EEA:超级计算大脑系列产品线
............
3.5.12 上汽MG EEA:SIGMA架构特点
3.5.13 上汽MG EEA:SIGMA架构电子电气架构
3.6 长安汽车
3.6.1 长安汽车EEA演进:技术路线
3.6.2 长安汽车EPA 1 EEA:三大域控架构 & 支持 SOA 服务拓展
3.6.3 长安汽车EPA 1 EEA:整车控制域SVCU
3.6.4 长安汽车SDA“中央+环网”EEA:首发推出CD701原型车
3.6.5 长安汽车SDA“中央+环网”EEA:架构特点
3.6.6 长安汽车SDA“中央+环网”EEA:六层架构设计,分层解耦
3.6.7 长安汽车SDA“中央+环网”EEA:拓扑结构
3.6.8 长安汽车SDA“中央+环网”EEA:架构拓展性的思考
3.6.9 长安汽车SDA“中央+环网”EEA:服务化方案
3.6.10 长安汽车SDA“中央+环网”EEA:服务化通信
3.6.11 长安汽车SDA“中央+环网”EEA:主干网通讯
3.6.12 长安汽车SDA“中央+环网”EEA:近程通讯
3.6.13 长安汽车SDA“中央+环网”EEA:硬件I/O标准化
3.6.14 长安汽车SDA“中央+环网”EEA:信息安全
3.7 一汽红旗
3.7.1 一汽红旗EEA演进:FEEA2.0、FEEA3.0
3.7.2 一汽红旗FEEA2.0 EEA:架构特点
3.7.3 一汽红旗FEEA2.0 EEA:智能座舱平台
3.7.4 一汽红旗FEEA2.0 EEA:红旗HC3.0智能座舱
3.7.5 一汽红旗FEEA2.0 EEA:车身域控制器BDCM
3.7.6 一汽红旗FEEA3.0 EEA:智控、智享、智驾三大平台
3.7.7 一汽红旗FEEA3.0 EEA:TSN以太网多域控制器
3.7.8 一汽红旗FEEA3.0 EEA:“旗帜”超级架构FMEs
3.7.9 一汽红旗FEEA3.0 EEA:芯片及感知配置
3.7.10 一汽红旗FEEA3.0 EEA:芯片及感知配置
3.8 奇瑞汽车
3.8.1 奇瑞汽车EEA演进:技术路线
3.8.2 奇瑞汽车EEA:雄狮智能
04 外资品牌OEM的电子电气架构
4.1 大众汽车
4.1.1 大众EEA演进:MQB—MEB—SSP
4.1.2 大众MEB EEA演进:E(3) 1.1/1.2/2.0版本
4.1.3 大众MQB平台 EEA架构:通信拓扑(1)
4.1.4 大众MQB平台 EEA架构:通信拓扑(2)
4.1.5 大众MQB平台 EEA:系统架构
4.1.6 大众MEB平台 EEA:平台介绍
4.1.7 大众MEB平台 EEA:ID.4详细的架构拓扑图
4.1.8 大众MEB平台 EEA:ID.4通信网络连接
4.1.9 大众MEB平台 EEA:大众ID.4 网络架构拓扑
4.1.10 大众MEB平台 EEA:大众ID.4 网络架构指标定义及总线布局
4.1.11 大众MEB平台 EEA:大众ID.4 ICAS架构
4.1.12 大众MEB平台 EEA:大众ID.4 ICAS 计算架构
4.1.13 大众MEB平台 EEA:大众ID.4 ICAS 内部通信架构
4.1.14 大众MEB平台 EEA:功能分区
4.1.15 大众MEB平台 EEA:大众ID.4 ICAS1和ICAS3的功能分区
4.1.16 大众MEB平台 EEA:ICAS1车控域功能分区
4.1.17 大众多域计算布局:ICAS1车辆控制域
4.1.18 大众MEB平台 EEA:大众ID.4 ICAS3功能分区
4.1.19 大众MEB平台 EEA:大众ID.4 ICAS3主控芯片
4.1.20 大众MEB平台 EEA:ICAS3驾舱域控制器功能体系
4.1.21 大众MEB平台 EEA:ICAS3驾舱域控制器系统架构
............
4.1.32 大众MEB平台 EEA:云服务架构
4.1.33 大众MEB平台 EEA:网络安全架构
4.1.34 大众E³ 2.0 EEA:开发进展
4.1.35 大众E³ 2.0 EEA:CARIAD软件平台(1)
4.1.36 大众E³ 2.0 EEA:CARIAD软件平台(2)
4.1.37 大众E³ 2.0架构:VW.OS汽车操作系统
4.1.38 大众SSP架构:PPE和MEB都会并入未来SSP架构
4.1.39 大众SSP架构:EEA架构设计
4.1.40 大众SSP架构:车型规划
4.1.41 大众SSP架构:中央集群计算方案(Central Computing Cluster )
4.2 宝马汽车
4.2.1 宝马汽车EEA演进:技术路线
4.2.2 宝马量产EEA:架构拓扑图
4.2.3 宝马量产EEA:架构拓扑中各节点的具体含义
4.2.4 宝马量产EEA:以太网通信节点
4.2.5 宝马量产EEA:HU-H座舱系统架构
4.2.6 宝马量产EEA:HU-H网联系统架构
4.2.7 宝马量产EEA:ADAS系统硬件配置
4.2.8 宝马量产EEA:ADAS系统架构和各节点含义
4.2.9 宝马量产EEA:软件系统发展演变
4.2.10 宝马下一代Zonal EEA
4.2.11 宝马下一代Zonal EEA:架构设计思路
4.2.12 宝马下一代Zonal EEA:准中央计算(2个计算群)+Zonal 区域控制器
4.2.13 宝马下一代Zonal EEA:架构拓扑图
4.2.14 宝马下一代Zonal EEA:硬件架构采用2个计算群
4.2.15 宝马下一代Zonal EEA:动态可配置系统DRS
4.2.16 宝马下一代Zonal EEA:通信架构及SOA解决方案
4.2.17 宝马下一代Zonal EEA:车载通信网络
4.2.18 宝马下一代Zonal EEA:自动驾驶硬件
4.2.19 宝马下一代Zonal EEA:智能座舱规划
4.2.20 宝马下一代Zonal EEA:Neue Klasse架构规划
4.3 奔驰汽车
4.3.1 奔驰汽车EEA演进:技术路线
4.3.2 奔驰量产EEA:STAR3网络架构概述
4.3.3 奔驰量产EEA:STAR3网络拓扑连接
4.3.4 奔驰量产EEA:STAR3高速通信带宽(1)
4.3.5 奔驰量产EEA:STAR3高速通信带宽(2)
4.3.6 奔驰量产EEA:STAR3高速通信带宽(3)
4.3.7 奔驰量产EEA:STAR3车载以太网网络拓扑
4.3.8 奔驰量产EEA:STAR3面向服务的通信方式(1)
4.3.9 奔驰量产EEA:STAR3面向服务的通信方式(2)
4.3.10 奔驰量产EEA:STAR3面向服务的通信方式(3)
4.3.11 奔驰量产EEA:STAR3网络和信息安全
4.3.12 奔驰量产EEA:STAR3 12V电源架构
4.3.13 奔驰量产EEA:STAR3架构拓扑
4.3.14 奔驰量产EEA:STAR3架构拓扑功能定义(1)
4.3.15 奔驰量产EEA:STAR3架构拓扑功能定义(2)
4.3.16 奔驰量产EEA:STAR3架构拓扑功能定义(3)
4.3.17 奔驰EEA关键技术(软件平台):MB.OS操作系统(1)
4.3.18 奔驰EEA关键技术(软件平台):MB.OS操作系统(2)
4.3.19 奔驰EEA关键技术(软件平台):MB.OS操作系统(3)
4.3.20 奔驰EEA关键技术(软件平台):MB.OS操作系统(4)
4.3.21 奔驰EEA关键技术(自动驾驶):合作伙伴
4.3.22 奔驰EEA关键技术(智能座舱):第三代MBUX智能人机交互系统
4.4 丰田
4.4.1 丰田汽车EEA演进:技术路线
4.4.2 丰田Zonal架构:软件平台(BSW)演进路径
4.4.3 丰田Zonal架构:EEA演进及AUTOSAR BSW迁移
4.4.4 丰田Zonal架构:Central & Zone Concept(1)
4.4.5 丰田Zonal架构:Central & Zone Concept(2)
4.4.6 丰田Zonal架构:软件开发策略
4.4.7 丰田Zonal架构:自适应软件平台
4.4.8 丰田Zonal架构:计算机辅助软件工程(CASE)系统开发
4.4.9 丰田Zonal架构:网络安全和加密算法
4.4.10 丰田EEA关键技术(自动驾驶):TRI-AD
4.4.11 丰田EEA关键技术(自动驾驶):自动驾驶方案发展演进
4.4.12 丰田EEA关键技术(智能座舱):T-smart智能座舱
4.4.13 丰田EEA关键技术(软件):Arene操作系统(1)
4.4.14 丰田EEA关键技术(软件):Arene操作系统(2)
4.5 通用
4.5.1 通用汽车EEA演进:技术路线
4.5.2 通用汽车Global A和Global B电子电气架构比较
4.5.3 通用汽车Global A电子电气架构
4.5.4 通用汽车VIP智能电子架构
4.5.5 通用汽车VIP智能电子架构:主要技术特点(1)
4.5.6 通用汽车VIP智能电子架构:主要技术特点(2)
4.6 福特
4.6.1 福特汽车EEA演进:技术路线
4.6.2 福特汽车FNV电子电气架构
4.6.3 福特汽车FNV电子电气架构:智能驾驶(1)
4.6.4 福特汽车FNV电子电气架构:智能驾驶(2)
4.6.5 福特汽车FNV电子电气架构:OTA升级
4.6.6 福特汽车FNV电子电气架构:智能互联
4.6.7 福特汽车FNV电子电气架构:通信架构
4.7 沃尔沃
4.7.1 沃尔沃EEA演进:技术路线
4.7.2 沃尔沃SPA1 EE架构:域集中式
4.7.3 沃尔沃SPA2 EE架构:首发搭载沃尔沃EX90
4.7.4 沃尔沃SPA2 EE架构:中央计算VCU+区域控制器VIU(1)
4.7.5 沃尔沃SPA2 EE架构:中央计算VCU+区域控制器VIU(2)
4.7.6 沃尔沃SPA2 EE架构:系统架构(1)
4.7.7 沃尔沃SPA2 EE架构:系统架构(2)
4.7.8 沃尔沃SPA2 EE架构:系统开发步骤(第一阶段)
4.7.9 沃尔沃SPA2 EE架构:系统开发步骤(第二阶段)
4.7.10 沃尔沃SPA2 EE架构:VCU中央计算机
4.7.11 沃尔沃SPA2 EE架构:中央计算平台的软件开发(1)
4.7.12 沃尔沃SPA2 EE架构:中央计算平台的软件开发(2)
4.7.13 沃尔沃SPA2 EE架构:中央计算平台的软件开发(3)
4.7.14 沃尔沃SPA2 EE架构:中央计算平台的软件开发(4)
4.7.15 沃尔沃SPA2 EE架构:中央计算平台的软件开发(5)
4.7.16 沃尔沃SPA2 EE架构:中国in house核心开发团队
4.7.17 沃尔沃SPA2 EEA关键技术(中央计算平台):硬件平台
4.7.18 沃尔沃SPA2 EEA关键技术(VIU区域控制器):VIU功能分配
4.7.19 沃尔沃SPA2 EEA关键技术(软件):SOA软件设计框架
4.7.20 沃尔沃SPA2 EEA关键技术(软件):软件分层架构
4.7.21 沃尔沃SPA2 EEA关键技术(软件):SOA软件
4.7.22 沃尔沃SPA2 EEA关键技术(软件):VolvoCars.OS
4.8 雷诺-日产-三菱联盟
4.8.1 雷诺-日产-三菱联盟(RNM)EEA演进:技术规划
4.8.2 雷诺-日产-三菱联盟(RNM)EEA演进:HPC +Zonal+Sensor架构
4.8.3 雷诺-日产-三菱联盟(RNM)EEA演进:FACE架构
4.8.4 雷诺-日产-三菱联盟(RNM)EEA演进:FACE架构CAN数据包
4.8.5 雷诺-日产-三菱联盟(RNM)EEA演进:软件定义汽车
4.8.6 日产智能驾驶方案发展路线
4.8.7 雷诺日产三菱联盟云系统
4.8.8 日产ADAS算法自研情况
4.9 Stellantis
4.9.1 Stellantis STLA Brain准中央EEA:HPC和Zonal控制器
4.9.2 Stellantis STLA Brain准中央EEA:三大技术平台(1)
4.9.3 Stellantis STLA Brain准中央EEA:三大技术平台(2)
4.9.4 Stellantis STLA Brain准中央EEA:软件业务策略(1)
4.9.5 Stellantis STLA Brain准中央EEA:软件业务策略(2)
4.9.6 Stellantis STLA Brain准中央EEA:软件业务策略(3)
4.9.7 Stellantis STLA Brain准中央EEA:软件系统架构(4)
4.9.8 Stellantis STLA Brain准中央EEA:STLA SmartCockpit
4.9.9 Stellantis STLA Brain准中央EEA:STLA Auto Drive
05 汽车E/E架构升级供应链部署
5.1 跨域/中央计算平台:供应链部署
5.1.1 Tier1主流的中央计算平台解决方案
5.1.2 跨域/中央计算平台产品(1)
5.1.3 跨域/中央计算平台产品(2)
5.1.4 跨域/中央计算平台产品(3)
5.1.5 跨域/中央计算平台产品(4)
5.1.6 跨域/中央计算平台产品(5)
5.1.7 跨域/中央计算平台产品(6)
5.1.8 跨域/中央计算平台产品(7)
5.1.9 跨域/中央计算平台产品(8)
5.1.10 跨域/中央计算平台产品(9)
5.1.11 跨域/中央计算平台产品(10)
5.1.12 跨域/中央计算平台产品(11)
5.2 跨域/中央计算SOC:供应链部署
5.2.1 中央计算SOC:跨域融合SoC产品
5.2.2 跨域/中央计算平台SOC产品(1)
5.2.3 跨域/中央计算平台SOC产品(2)
5.2.4 跨域/中央计算平台SOC产品(3)
5.2.5 跨域/中央计算平台SOC产品(4)
5.2.6 跨域/中央计算平台SOC产品(5)
5.3 MCU:供应链部署
5.3.1 中央计算+Zonal控制器对MCU的需求
5.3.2 中央计算+Zonal控制器MCU产品(1)
5.3.3 中央计算+Zonal控制器MCU产品(2)
5.3.4 中央计算+Zonal控制器MCU产品(3)
5.3.5 中央计算+Zonal控制器MCU产品(4)
5.3.6 中央计算+Zonal控制器MCU产品(5)
5.4 车载总线网络:供应链部署
5.4.1 主流车用网络系统架构图
5.4.2 车载总线网络趋势(1)
5.4.3 车载总线网络趋势(2)
5.4.4 车载总线网络趋势(3)
5.4.5 车载总线网络趋势(4)
5.4.6 车载总线网络趋势(5)
5.4.7 车载总线网络趋势(6)
5.4.8 汽车以太网交换机产品(1)
5.4.9 汽车以太网交换机产品(2)
5.4.10 下一代E/E架构,车载以太网PHY芯片需求迫切
5.4.11 车载以太网PHY芯片产品(1)
5.4.12 车载以太网PHY芯片产品(2)
5.4.13 车载以太网PHY芯片产品(3)
5.4.14 车载以太网PHY芯片产品(4)
5.4.15 车载以太网PHY芯片产品(5)
5.4.16 车载以太网PHY芯片产品(6)
5.4.17 车载MIPI A-PHY趋势(1)
5.4.18 车载MIPI A-PHY趋势(2)
5.4.19 车载MIPI A-PHY趋势(3)
5.4.20 MIPI A-PHY芯片产品
5.5 PCIe交换机:供应链部署
5.5.1 下一代车载E/E架构中,PCIe交换机的应用(1)
5.5.2 下一代车载E/E架构中,PCIe交换机的应用(2)
5.5.3 PCIe交换机趋势一
5.5.4 PCIe交换机趋势二
5.5.5 PCIe交换机趋势三
5.5.6 PCIe交换机的应用案例(1)
5.5.7 PCIe交换机的应用案例(2)
5.6 高速网关处理器:供应链部署
5.6.1 分布式网关、中央网关和以太网网关拓扑演进趋势
5.6.2 中央网关将改变汽车架构
5.6.3 网关控制器扮演未来E/E架构中车载数据服务器的角色
5.6.4 全新服务型网关控制器算力性能将有十倍以上的提升
5.6.5 未来SOA架构(即Zonal)的汽车网关
5.6.6 汽车网关的Gateway SoC控制芯片和通信协议
5.6.7 创新的下一代网关系统需支持各种高速 I / O(比如说PCIe 交换机)
5.6.8 典型的网关处理器产品总结
5.6.9 网关处理器产品(1)
5.6.10 网关处理器产品(2)
5.6.11 网关处理器产品(3)
5.6.12 网关处理器产品(4)
5.7 Zonal区域控制器:供应链部署
5.7.1 下一代E/E架构计算集中式+区域控制器(Zonal Architecture)
5.7.2 Zonal EEA架构框架
5.7.3 区域控制器(1)
5.7.4 区域控制器(2)
5.7.5 区域控制器(3)
5.7.6 区域控制器(4)
5.7.7 区域控制器(5)
5.7.8 区域控制器(6)
5.7.9 区域控制器(7)
5.7.10 区域控制器(8)
5.7.11 区域控制器(9)
5.7.12 区域控制器(10)
5.8 智能配电和E-fuse:供应链部署
5.8.1 电源架构升级趋势(1)
5.8.2 电源架构升级趋势(2)
5.8.3 电源架构升级趋势(3)
5.8.4 保险丝盒的发展过程
5.8.5 现阶段主流保险丝盒主流产品
5.8.6 E-fuse电子熔丝智能配电产品
5.8.7 智能MOSFET取代传统的保险丝和机械式继电器
5.8.8 MOSFET智能电气盒的产品特点和优势
5.8.9 MOSFET智能电气盒的布置位置
5.8.10 MOSFET智能电气盒的三个发展阶段
5.8.11 智能配电盒也可以实现对车身的控制
5.8.12 SmartFET在智能电气盒中的应用
5.8.13 车身区域和智能配电模块MOSFET供应商列表
5.8.14 智能配电案例(1)
5.8.15 智能配电案例(2)
5.8.16 智能配电案例(3)
5.8.17 智能配电案例(4)
5.8.18 智能配电案例(5)
5.8.19 智能配电案例(6)
5.8.20 智能配电案例(7)
5.9 AP AUTOSAR和SOA软件:供应链部署
5.9.1 软件架构升级:EE架构的演进驱动了汽车底层OS的变革
5.9.2 软件架构升级:域控软件架构部署技术
5.9.3 软件架构升级:软件架构向Adaptive AutoSAR升级
5.9.4 软件架构升级:软硬件解耦技术
5.9.5 软件架构升级:E/E架构解耦和分层逻辑
5.9.6 软件架构升级:软件功能和硬件功能的迭代(1)
5.9.7 软件架构升级:软件功能和硬件功能的迭代(2)
5.9.8 软件架构升级:面向服务的体系结构(SOA)已成为整车操作系统的代名词
5.9.9 软件架构升级:面向服务的体系结构(SOA)产业分工建议
5.9.10 跨域/中央计算软件平台(1)
5.9.11 跨域/中央计算软件平台(2)
5.9.12 跨域/中央计算软件平台(3)
5.9.13 跨域/中央计算软件平台(4)
5.9.14 跨域/中央计算软件平台(5)
5.9.15 跨域/中央计算软件平台(6)
5.9.16 大陆集团:新E/E架构中,中间件扮演上下车身解耦功能
5.9.17 大陆集团:HPC及中间件架构框架(1)
5.9.18 大陆集团:HPC及中间件架构框架(2)
5.10 E/E架构开发工具链:供应链部署
5.10.1 ICV正向开发流程:系统架构、软件架构、EE架构
5.10.2 E/E架构开发工具链产品(1)
5.10.3 E/E架构开发工具链产品(2)
5.10.4 E/E架构开发工具链产品(3)
5.10.5 E/E架构开发工具链产品(4)
5.10.6 E/E架构开发工具链产品(5)
5.10.7 E/E架构开发工具链产品(6)
5.10.8 E/E架构开发工具链产品(7)
5.10.9 E/E架构开发工具链产品(8)
5.10.10 E/E架构开发工具链产品(9)
5.10.11 E/E架构开发工具链产品(10)