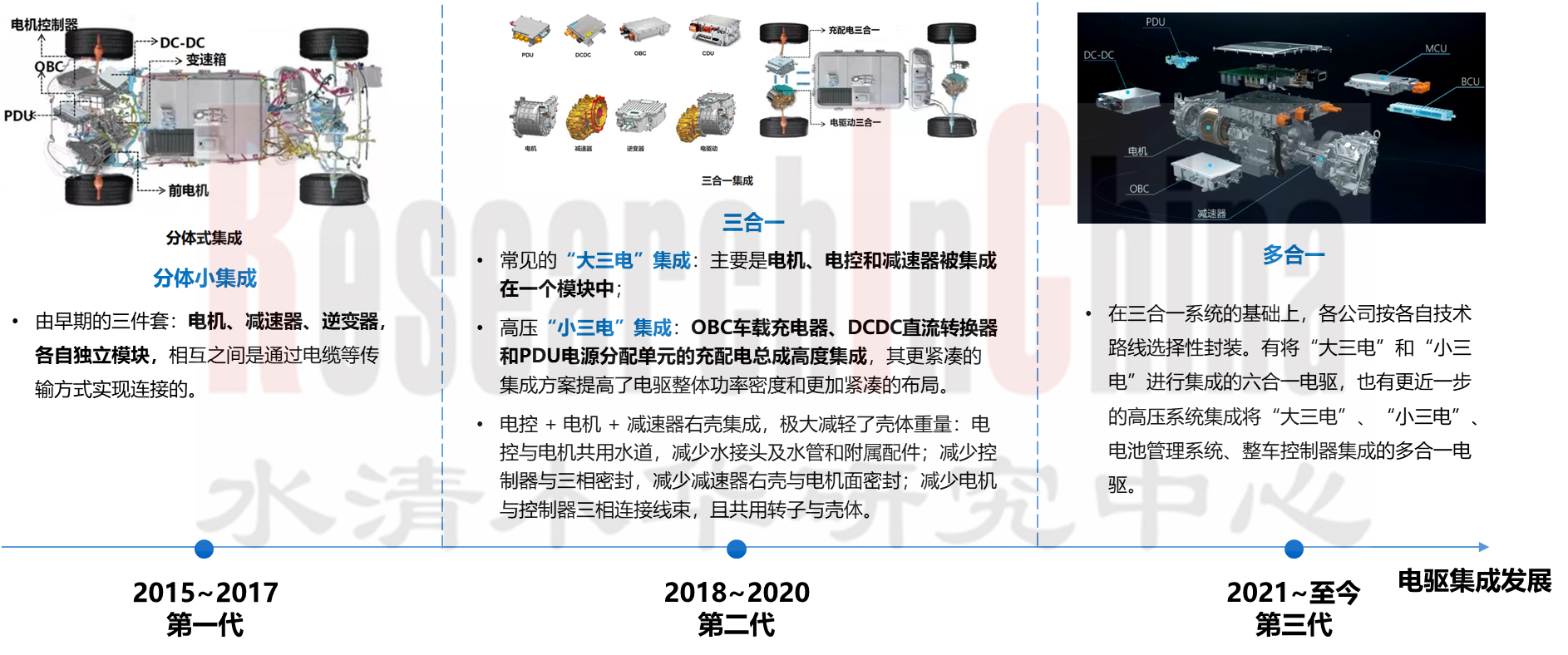
为迎合汽车电动化、轻量化的发展趋势,新能源汽车的电驱动总成也向着高度集成化的方向发展。目前,电驱系统的集成以三合一技术路线为主流,将电机、电控与减速器集成,整体技术已经较为成熟。
从纯电驱动总成发展趋势来看,电控系统的集成在未来则更倾向于多合一深度集成,整体向着“3+3+X平台”演进(电驱三合一+充配电三合一+BMS/VCU/PTC/TMM等)。在“六合一”产品的基础上进一步与BMS、VCU等集成,形成“七合一”或“八合一”,再进一步与整车热管理系统联动融合,形成“九合一”或“十合一”产品,实现机械部件和功率部件的深度融合。
电驱系统的集成思路
来源:佐思汽研《2023年新能源汽车电驱动与动力域行业研究报告》
主机厂加强电驱动系统自研自制
目前,电驱动总成市场上主要由汽车主机厂自制和第三方厂商提供。汽车主机厂自制的代表有特斯拉、蔚来、比亚迪、大众等,有的主机厂也正加大自供比例,比如长城汽车初期主要采用联合电子的电驱系统,现在正转向蜂巢动力自制;吉利初期主要采用日电产的电驱系统,现正转向威睿电动自制。而电驱系统供应商主要有博世、麦格纳、博格华纳、日电产、采埃孚等国际大厂,及国内的汇川技术、精进电机、华为、巨一动力等众多供应商。
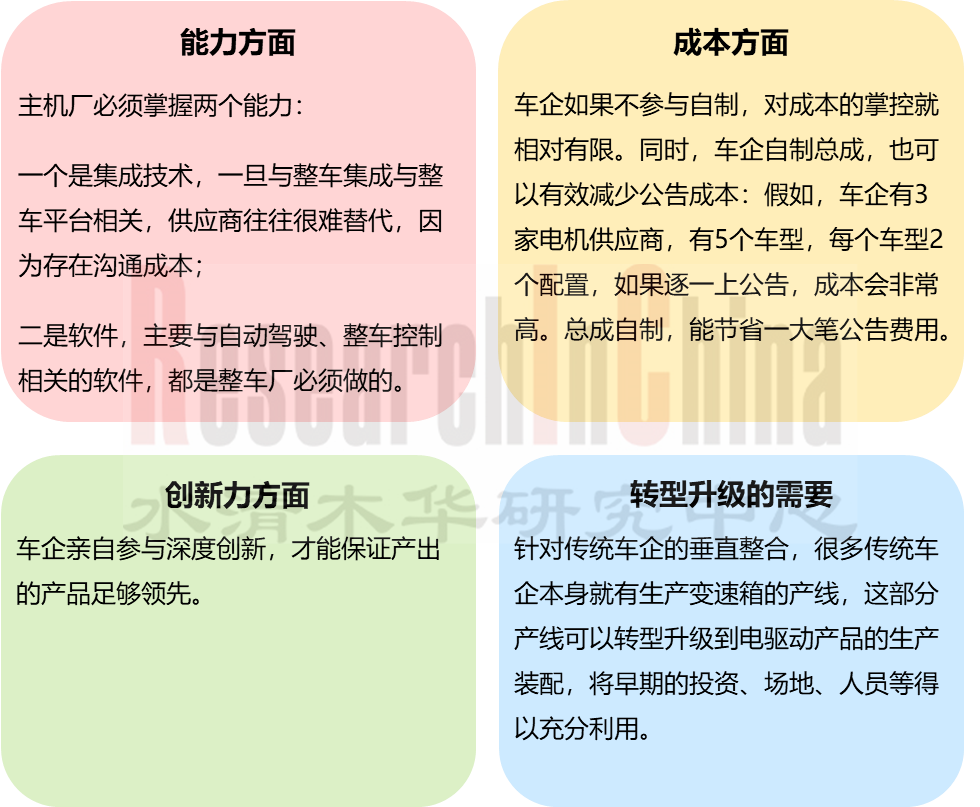
主机厂对于电驱系统自研自制的考量
来源:佐思汽研《2023年新能源汽车电驱动与动力域行业研究报告》
主机厂自研需求的加强,对传统的电驱总成供需关系带来变革。
•从主机厂角度来看,电驱系统是非常强的定制化产品,各车企对于自家车型的定位、动力和性能要求各不相同,需要配合整车系统。因此,对于主机厂自制电驱,能够节省上下游的沟通成本和投资成本,提高车型的迭代速度;
•从第三方供应商角度来看,成本优势较为明显。不管是针对生产领域的降本、提升节拍、降低废品率等,还是平台化的产线利用率,第三方厂商可以通过供应多家车厂,实现成本均摊,拥有规模化的成本优势。
主机厂的电驱总成方案

来源:佐思汽研《2023年新能源汽车电驱动与动力域行业研究报告》
但考虑到各车企对于自家车型的定位不同,对于整车动力的技术路线和性能需求也不相同。如中高端车型对于成本的敏感性就较低,更多地会优先考虑电驱动产品性能、可靠性要求,因此主机厂会更倾向于采用自供体系;而中低端车型因其整车价值量本来就较低,会更注重采购成本,通常主机厂自制成本较高,相较于第三方供应不具备性价比优势,因此主机厂可能会优先考虑第三方配套。未来,电驱动系统市场整车厂与第三方供应商将长期并存,由整车厂主导中高端车型市场,第三方供应商主导中低端车型市场。
电驱系统的域控化:从独立动力域向跨域融合、中央集成演进
从多合一控制器到动力域控制器的演进过程,最初是将所有的动力总成控制模块集成到一个PCB板上(多个主控芯片/单个控制板),紧接着是共用一个控制器芯片、进行软件算法融合(单个主控芯片/单个控制板)。
在多合一集成化的趋势下,以原有的VCU为基础,将VCU、BMS、MCU、DC/DC等动力总成控制模块的软硬件通过芯片集成、算法融合到一个控制器内,形成动力域控制平台,用更高性能的芯片来支持整车实现面向SOA服务架构。动力域控制器将实现动力总成控制决策端的集中,而传感器和执行器的功能将下放至各ECU。
如易鼎丰推出的整车动力域控制器DCU3000,就集成了VCU、BMS和热管理等控制功能,该产品符合AUTOSAR 4.2标准,应用层支持RTE和非RTE接口,支持UDS故障诊断、百兆车载以太网通信等功能,可定制Bootloader的刷写流程和参数,支持FOTA备份刷新功能,适用于供电系统为12V 的纯电动汽车和混合动力汽车。
易鼎丰动力域控制器DCU3000
来源:易鼎丰官网
随着主机厂陆续公布下一代电子电气架构,整车的控制器将进一步融合减少,最终形成“中央计算+区域控制”的终极架构。在汽车EEA演进趋势下,动力域也将进一步与其他功能域实现跨域整合,包括动力域+车身域+底盘的三域融合、动力域+底盘域融合等方案,以便能顺利演进到中央集成式架构。如采埃孚的车辆运动域控制器VMD、联合电子的整车运动域控制器VCU8.5、芯驰智能车控单元VHPC等。
采埃孚车辆运动域控制器VMD

来源:采埃孚
采埃孚的车辆运动域控制器(VMD)是一种中央计算机,旨在整合车辆的跨域功能,包括车身和动力系统管理,并支持独立功能,同时利用单一控制单元协调底盘、车辆、车身控制等功能,而无需额外的电子控制单元,从而降低复杂性。该VMD适用于所有类型的底盘平台、车辆运动和车身功能,适合下一代的软件定义汽车、未来域及区域车辆电子电气架构。
芯驰SCCA2.0架构——智能车控单元VHPC

来源:芯驰
2023年4月,芯驰率先推出了面向未来中央计算的架构SCCA2.0,为主机厂提供底层参考。该架构包括了6个核心单元,6个单元之间采用10G/1Gbps高性能车载以太网实现互联,并采用冗余架构,既确保了低延迟高流量的数据交换,又能确保安全性。其中,智能车控单元(Vehicle HPC)是底盘域+动力域的集成控制器,主要负责实现底盘和动力的融合以及智能操控,硬件上,该单元采用芯驰的G9处理器和E3 MCU,CPU总算力达300KDMIPS。
经纬恒润基于下一代EEA的动力域融合方案
来源:经纬恒润
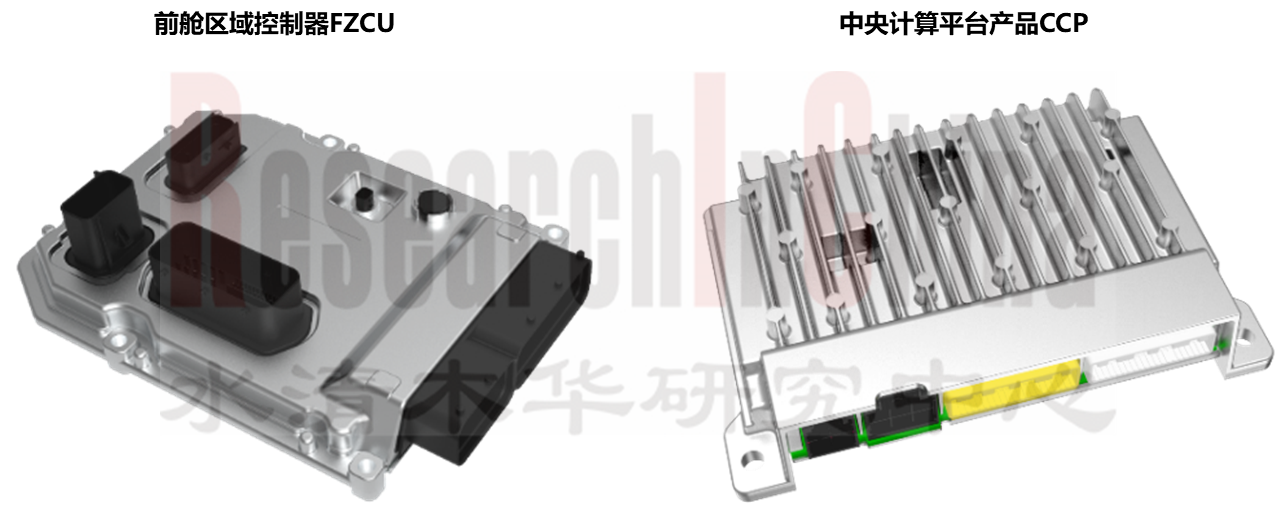
在汽车E/E架构演进下,经纬恒润设计研发了基于未来主流中央集成式架构的产品,并在2023新品发布会中发布了新产品:中央计算平台CCP和物理区域控制器ZCU。
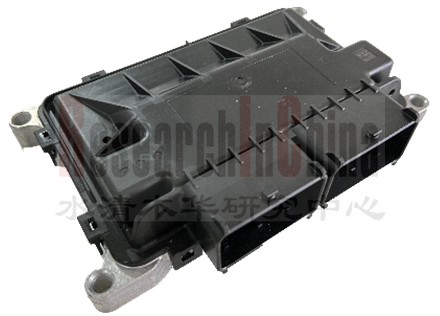
•区域控制器ZCU集成车身舒适域控制、动力系统控制、空调热管理、底盘控制、一级配电、二级配电、隔离开关、网关、OTA 等功能,分别位于前舱、左舱、右舱以及后舱。其中,前舱区域控制器FZCU负责车身舒适域、新能源动力域、部分底盘域和空调热管理的输入/输出信号采集控制,主要集成了VCU部分功能,如整车热管理、高压互锁等。
•中央计算平台产品CCP是车身域以及动力域的核心计算单元,集成了中央网关、车身舒适域控制、新能源整车动力控制、空调热管理、整车能源管理、全量数据采集、OTA升级、SOA服务等多项功能,符合ISO21434信息安全国际标准,可满足ASIL D功能安全等级要求。目前,该产品已完成研发、试验和小批量生产,已与4家国内主流车厂建立量产配套合作,并将于2023年底实现量产交付。
在动力域控制器开发方面,由于涉及到整车的控制策略及车型差异化、个性化的打造,一般来讲都是整车厂直接参与方案设计。对于域控开发,目前主要合作方式是主机厂自研核心软件程序、第三方供应硬件/底层驱动软件。
还有一种主机厂与第三方联合开发,主机厂可根据自身开发能力参与到控制板、软件底层、应用层、集成测试等方面的开发,如VCU、BMS的硬件、底层、应用层、集成的开发和测试。
动力域控开发合作模式

来源:佐思汽研《2023年新能源汽车电驱动与动力域行业研究报告》
整体而言,电驱动系统的多合一集成化带动了原本独立分散的动力总成控制模块朝着动力域控制器的集中融合演进,促进了动力总成系统控制从模块到系统、再到整体方案的融合。未来,不管是电驱动总成市场还是动力域控市场,或者是向着下一代EEA演进过程中的跨域融合以及未来的中央计算+区域控制的模式,整个产业链上下游多方都应共同推进中国汽车市场电驱动总成及动力域控的快速发展,实现合作共赢。
01 电驱动系统的集成方案
1.1 主流电驱集成方案:三合一
1.1.1 电驱动系统简介
1.1.2 电驱系统的集成思路
1.1.3 主流电驱系统集成方案:三合一驱动总成
1.1.4 三合一电驱集成方案(1):日电产三合一电驱系统
1.1.5 三合一电驱集成方案(1):Ni200Ex拆解图
1.1.6 三合一电驱集成方案(2)
1.1.7 三合一电驱供应商及新产品总结(1)
1.1.8 三合一电驱供应商及新产品总结(2)
1.1.9 三合一电驱供应商及新产品总结(3)
1.2 未来电驱集成趋势:多合一深度集成
1.2.1 未来电驱系统集成方案
1.2.2 多合一电驱开发的关键技术
1.2.3 多合一的优势及技术挑战
1.2.4 主机厂自研多合一的需求加强,导致供需关系发生变化
1.2.5 Tier 1厂商布局多合一的核心竞争力
1.2.6 多合一产品Tier1供应商及产品总结(1)
1.2.7 多合一产品Tier1供应商及产品总结(2)
1.2.8 多合一产品Tier1供应商及产品总结(3)
1.2.9 多合一产品Tier1供应商及产品总结(4)
1.2.10 多合一产品Tier1供应商及产品总结(5)
1.2.11 多合一电驱集成方案(1)
1.2.12 多合一电驱集成方案(2)
1.2.13 电驱动系统由机械电子集成向动力域解决方向发展
1.3 电驱系统市场概况及供应模式分析
1.3.1 电驱动系统市场概况(1)
1.3.2 电驱动系统市场概况(2)
1.3.3 电驱动系统市场概况(3)
1.3.4 电驱动系统市场份额(1):电机配套TOP10企业
1.3.5 电驱动系统市场份额(2):电控配套TOP10企业
1.3.6 电驱动系统市场份额(3):电驱动系统配套TOP10企业
1.3.7 电驱动系统的主要供货模式
1.3.8 OEM电驱系统自制还是外购?(1):主机厂角度
1.3.9 OEM电驱系统自制还是外购?(2):第三方厂商角度
1.3.10 OEM电驱系统自制还是外购?(3):总结
1.3.11 主机厂电驱动系统供应链信息总结(1)
1.3.12 主机厂电驱动系统供应链信息总结(2)
1.3.13 主机厂的动力控制方案
1.4 动力总成核心控制部件-VCU
1.4.1 电驱总成控制系统——整车控制器VCU
1.4.2 VCU电控开发标准
1.4.3 VCU的基本功能
1.4.4 VCU的基本功能清单
1.4.5 VCU的车辆驱动控制策略
1.4.6 联合电子VCU软件核心功能(1):支持Reset后可自动恢复行驶状态的电管理功能
1.4.7 联合电子VCU软件核心功能(2):支持多种协议的VCU充电主控功能
1.4.8 联合电子VCU软件核心功能(3):支持充电预热的中低温回路热管理控制
1.4.9 国内VCU主要开发及合作模式(1)
1.4.10 国内VCU主要开发及合作模式(2)
02 动力总成的域融合方案
2.1 功能域架构-动力域控制器
2.1.1 动力域控制器概述
2.1.1.1 动力域的诞生背景
2.1.1.2 多合一控制器向芯片级集成、动力域控制器的演进趋势
2.1.1.3 动力域控制器与多合一控制器的区别
2.1.1.4 动力域控实现动力总成控制决策端集中
2.1.1.5 动力域控的主流集成方案:VCU+BMS+“XCU”
2.1.1.6 动力域控提升各控制器通信的实时性
2.1.1.7 动力域控制器产品的开发技术要求
2.1.1.8 动力域控制器的功能安全开发架构
2.1.1.9 动力域将VCU、BMS等集成到多核芯片架构的域控制器中
2.1.1.10 电动汽车动力域控制系统方案(1)
2.1.1.11 电动汽车动力域控制系统方案(2)
2.1.1.12 什么样的功能可以域控?(1):时间尺度
2.1.1.13 什么样的功能可以域控?(2):基于时间尺度的功能集中
2.1.1.14 什么样的功能可以域控?(3):实时控制的拆解分析
2.1.1.15 什么样的功能可以域控?(4):车云一体(1)
2.1.1.16 什么样的功能可以域控?(5):车云一体(2)
2.1.1.17 以电机控制器为例,电控厂商如何向动力域控转型?(1)
2.1.1.18 以电机控制器为例,电控厂商如何向动力域控转型?(2)
2.1.1.19 以电机控制器为例,电控厂商如何向动力域控转型?(3)
2.1.1.20 动力域控制器的开发优势
2.1.2 商用车的动力域解决方案
2.1.2.1 商用车域架构
2.1.2.2 碳化硅控制器在商用车应用的优劣势
2.1.2.3 商用车智能动力系统解决方案(1):一汽解放智慧动力域(1)——四大解决方案平台
2.1.2.4 商用车智能动力系统解决方案(1):一汽解放智慧动力域(2)——智慧动力域产品
2.1.2.5 商用车智能动力系统解决方案(1):一汽解放智慧动力域(3)——智慧动力域产品评价标准
2.1.2.6 商用车智能动力系统解决方案(2):宇通软硬件一体化电动专属平台——睿控E平台
2.1.2.7 商用车智能动力系统解决方案(2):宇通软硬件一体化电动专属平台——多合一动力域控制器
2.1.3 主机厂及Tier1动力域控产品总结
2.1.3.1 国内车企动力域控制器发展
2.1.3.2 主机厂动力域控产品总结
2.1.3.3 Tier1动力域控方案及产品总结(1)
2.1.3.4 Tier1动力域控方案及产品总结(2)
2.1.3.5 Tier1动力域控方案及产品总结(3)
2.2 跨域趋势下的动力域融合方案
2.2.1 方案一:底盘+车身+动力
2.2.1.1 动力域演进第二阶段(1)
2.2.1.2 三域融合案例(1):东软睿驰基于NXP S32G打造通用域控制器
2.2.1.3 三域融合案例(2):华为整车控制平台VDC
2.2.1.4 主机厂三域(中央控制域)融合方案总结(1)
2.2.1.5 主机厂三域(中央控制域)融合方案总结(2)
2.2.1.6 Tier 1厂商三域融合方案及产品(1)
2.2.1.7 Tier 1厂商三域融合方案及产品(2)
2.2.2 方案二:底盘域+动力域
2.2.2.1 动力域演进第二阶段(2)
2.2.2.2 “滑板底盘”为电驱总成带来变革:从软件融合到硬件融合
2.2.2.3 动力域与底盘域的融合路线:三轴一体的智能底盘
2.2.2.4 车辆运动域融合案例(1)
2.2.2.5 车辆运动域融合案例(2)
2.2.2.6 车辆运动域融合案例(3)
2.2.2.7 极氪汽车动力底盘域融合方案(1):电机控制功能融合
2.2.2.8 极氪汽车动力底盘域融合方案(2):电池管理功能融合
2.2.2.9 极氪汽车动力底盘域融合方案(3):充电控制功能融合
2.2.2.10 极氪汽车动力底盘域融合方案(4):三电功能融合
2.2.2.11 Tier 1厂商车辆运动域方案及产品(1)
2.2.2.12 Tier 1厂商车辆运动域方案及产品(2)
2.2.3 方案三:中央计算+区域控制器
2.2.3.1 动力域架构演进第三阶段:中央控制域+区域架构
2.2.3.2 区域控制器的定义
2.2.3.3 区域控制器的软硬件层
2.2.3.4 区域控制器PDC位置分布
2.2.3.5 金脉电子区域控制器(ZCU)解决方案
2.2.3.6 远峰科技区域控制器解决方案
03 动力域控系统的供应链
3.1 VCU/动力域控产业链介绍
3.2 动力域控制器的软硬件关键要素
3.3 动力域控系统上游-硬件
3.3.1 动力域控系统核心-主控MCU的需求
3.3.1.1 动力域控系统上游:硬件组成——主控MCU是核心
3.3.1.2 动力域控对于MCU芯片的性能需求
3.3.1.3 动力域控制系统的演进对主控MCU算力的要求
3.3.1.4 区域控制器进行主控芯片MCU选型应注意什么?(1)
3.3.1.5 区域控制器进行主控芯片MCU选型应注意什么?(2)
3.3.1.6 动力域融合的主控芯片:iECU域控制器硬件架构
3.3.2 动力域主控MCU芯片方案及案例分享
3.3.2.1 整车控制域的MCU芯片方案(1)——基于NXP S32K系列MCU芯片
3.3.2.2 动力域控制器MCU芯片方案(1):ST Stellar P 系列MCU
3.3.2.3 动力域控制器MCU芯片方案(2):基于英飞凌AURIX TC297TA的动力域控制器方案(1)
3.3.2.4 动力域控制器MCU芯片方案(2):基于英飞凌AURIX TC297TA的动力域控制器方案(2)
3.3.2.5 动力域控制器MCU芯片方案(3):基于NXP S32E系列MCU芯片(1)
3.3.2.6 动力域控制器MCU芯片方案(3):基于NXP S32E系列MCU芯片(2)
3.3.2.7 动力域控制器MCU芯片方案(4):云途半导体域控芯片YTM32B1H(1)
3.3.2.8 动力域控制器MCU芯片方案(4):云途半导体域控芯片YTM32B1H(2)
3.3.2.9 动力域MCU芯片方案设计(1):ST基于Stellar P的动力域控制器解决方案(1)
3.3.2.10 动力域MCU芯片方案设计(1):ST基于Stellar P的动力域控制器解决方案(2)
3.3.2.11 动力域MCU芯片方案设计(1):ST基于Stellar P的动力域控制器解决方案(3)
3.3.2.12 动力域MCU芯片方案设计(2):ST的VCU/PDCU硬件设计解决方案(1)
3.3.2.13 动力域MCU芯片方案设计(2):ST的VCU/PDCU硬件设计解决方案(2)
3.3.2.14 基于NXP S32E的动力域控制器参考设计(1):PDC应用程序分配
3.3.2.15 基于NXP S32E的动力域控制器参考设计(2):SMU系统管理
3.3.2.16 基于NXP S32E的动力域控制器参考设计(3):RTU0
3.3.2.17 基于NXP S32E的动力域控制器参考设计(4):RTU1(1)
3.3.2.18 基于NXP S32E的动力域控制器参考设计(5):RTU1(2)
3.3.2.19 基于NXP S32E的动力域控制器参考设计(6):RTU1(3)
3.3.2.20 基于NXP S32E的动力域控制器参考设计(7):RTU1(4)
3.3.2.21 基于NXP S32E的动力域控制器参考设计(8):CAN通信——FlexLLCE
3.3.2.22 基于NXP S32E的动力域控制器参考设计(9):多核通信
3.3.3 动力域MCU市场竞争格局及产品选型
3.3.3.1 动力域控MCU芯片的国产化替代进程
3.3.3.2 国外动力域控MCU芯片供应商列表及产品选型
3.3.3.3 国内动力域控MCU芯片供应商列表及产品选型(1)
3.3.3.4 国内动力域控MCU芯片供应商列表及产品选型(2)
3.3.3.5 国内动力域控MCU芯片供应商列表及产品选型(3)
3.3.3.6 国内动力域控MCU芯片供应商列表及产品选型(4)
3.4 动力域控系统上游-软件
3.4.1 动力域控系统上游:软件组成
3.4.2 动力域控制器的开发重点在于软件
3.4.3 ST的VCU/PDCU软件参考设计
3.4.4 ST的VCU/PDCU功能安全设计
3.4.5 NXP基于S32K3的软件解决方案(1)
3.4.6 NXP基于S32K3的软件解决方案(2)
3.4.7 动力域实现多域融合的软件方案(1)
3.4.8 动力域实现多域融合的软件方案(2)
3.4.9 动力域软件方案应用实例(1)
3.4.10 动力域软件方案应用实例(2)
3.4.11 从软件出发,第三方厂商如何向动力域控转型?(以电机控制器为例)
3.4.12 从软件出发,第三方厂商如何向动力域控转型?:动力域控下AUTOSAR的选择
04 动力域的市场情况及发展趋势
4.1 动力域控的合作开发模式
4.2 2022-2025年中国乘用车动力域控制器市场规模预测
4.3 动力域控系统的发展需求
4.4 动力域控制器未来发展的核心能力
4.5 动力域未来八大发展趋势(1)
4.6 动力域未来八大发展趋势(2)
4.7 动力总成技术趋势一
4.8 动力总成技术趋势二(1)
4.9 动力总成技术趋势二(2)
4.10 动力总成技术趋势二(3)
4.11 动力总成技术趋势三
05 主机厂动力总成及控制系统布局
5.1 比亚迪
5.1.1 比亚迪e平台演进:从e1.0到e3.0
5.1.2 比亚迪e平台3.0:智能动力域
5.1.3 比亚迪e平台3.0整车系统层级融合:八合一电动力总成
5.1.4 比亚迪整车控制功能融合方案:自研动力域控制器
5.1.5 比亚迪动力域控制器:融合驱动、制动和转向功能
5.1.6 比亚迪智能动力域发展趋势(1):智能控制
5.1.7 比亚迪智能动力域发展趋势(2):智能定制
5.1.8 比亚迪智能动力域发展趋势(3):智能监控
5.1.9 比亚迪智能动力域功能集成带来的挑战
5.1.10 比亚迪下一代EEA:易四方技术平台以四电机独立驱动为核心
5.1.11 比亚迪下一代EEA:“易四方”多域计算+区域控制架构
5.1.12 比亚迪海豚:动力域控制器(1)
5.1.13 比亚迪海豚:动力域控制器(2)
5.1.14 比亚迪元:八合一动力总成拆解(1)
5.1.15 比亚迪元:八合一动力总成拆解(2)
5.2 吉利/极氪
5.2.1 极氪汽车:VCU向整车行驶区域控制器演进
5.2.2 极氪汽车:整车行驶区域控制器的融合路径
5.2.3 极氪汽车:整车行驶区域控制器的融合策略
5.2.4 极氪汽车动力底盘域融合方案(1):选择High Level方案进行三电功能融合
5.2.5 极氪汽车动力底盘域融合方案(2):三电功能融合架构
5.2.6 极氪汽车:如何实现动力底盘域功能软件融合的分类部署逻辑?(1)
5.2.7 极氪汽车:如何实现动力底盘域功能软件融合的分类部署逻辑?(2)
5.2.8 极氪汽车行驶区域控制器PCMU(1):产品功能及特点
5.2.9 极氪汽车行驶区域控制器PCMU(2):功能层级
5.2.10 极氪汽车行驶区域控制器PCMU(3):未来演进路线
5.2.11 极氪汽车行驶区域控制器PCMU(4):共性问题及关键技术能力
5.2.12 极氪汽车行驶区域控制器的开发挑战及应对措施(1)
5.2.13 极氪汽车行驶区域控制器的开发挑战及应对措施(2)
5.2.14 吉利集成EDU和动力域控制器
5.2.15 吉利动力域控制器:网络测试项目供货范围(1)
5.2.16 吉利动力域控制器:网络测试项目供货范围(2)
5.2.17 吉利动力域控制器:网络测试项目供货范围(3)
5.2.18 吉利动力域控制器:网络测试项目供货范围(4)
5.3 特斯拉
5.3.1 特斯拉第一代域架构:Model S中的动力域
5.3.2 特斯拉第二代准中央架构:Model 3 区域控制器融合VCU功能
5.3.3 特斯拉Model 3:区域控制器位置分布
5.3.4 特斯拉Model 3动力域功能融合(1):BCM-FH集成热管理相关功能的配电控制
5.3.5 特斯拉Model 3动力域功能融合(2):BCM-FH控制器电路板拆解
5.3.6 特斯拉Model 3动力域功能融合(3):BCM-RH集成HVAC、扭矩控制等功能
5.3.7 特斯拉 Model Y:第四代电驱总成拆解(1)
5.3.8 特斯拉 Model Y:第四代电驱总成拆解(2)——电机控制器
5.3.9 特斯拉 Model Y:第四代电驱总成拆解(3)——电流传感器
5.3.10 特斯拉 Model Y:第四代电驱总成拆解(4)
5.3.11 特斯拉 Model Y:第四代电驱总成拆解(5)
5.3.12 特斯拉三电系统供应商及自制电池布局
5.4 长安
5.4.1 长安原力超集电驱产品
5.4.2 长安汽车“原力超集电驱”技术(1)
5.4.3 长安汽车“原力超集电驱”技术(2) :微核高频脉冲加热技术
5.4.4 长安汽车:VCU集成演进路线
5.4.5 长安汽车EPA 1 EEA:智能整车域控制器
5.4.6 长安汽车未来VCU功能融合方向:中央计算平台
5.4.7 长安汽车SDA“中央+环网”EEA:实现动力域等多个控制器的跨域集成
5.5 大众
5.5.1 大众MEB平台:双电机四驱(1)——前异步感应三合一电驱
5.5.2 大众MEB平台:双电机四驱(2)——后永磁三合一电驱
5.5.3 大众MEB平台电驱:上汽大众ID.4X量产案例及供应商信息
5.5.4 大众电驱技术演进方向
5.5.5 大众MEB平台:E(3)架构ICAS1车辆控制域集成动力域
5.5.6 大众:车辆控制域ICAS1与智能座舱域ICAS3之间的连接
5.5.7 大众ICAS1:车辆控制域架构及供应商
5.5.8 大众:车辆控制域ICAS1拆解图(1)
5.5.9 大众:车辆控制域ICAS1拆解图(2)
5.5.10 大众:车辆控制域ICAS1拆解图(3)
5.5.11 大众:车辆控制域ICAS1拆解图(4)
5.6 广汽
5.6.1 广汽埃安:AEP 3.0纯电平台
5.6.2 广汽埃安电驱动系统:自研自产策略
5.6.3 广汽埃安“夸克电驱”产品
5.6.4 广汽埃安“夸克电驱”三大前瞻技术(1):纳米晶-非晶电机
5.6.5 广汽埃安“夸克电驱”三大前瞻技术(2):X-PIN扁线绕组
5.6.6 广汽埃安“夸克电驱”三大前瞻技术(3):900V碳化硅功率模块
5.6.7 广汽埃安:高性能电驱技术路线(1)
5.6.8 广汽埃安:高性能电驱技术路线(2)——智能超融合电驱
5.6.9 广汽埃安:高性能电驱技术路线(3)——E-Drive 智能控制
5.6.10 广汽埃安:高性能电驱技术路线(4)——电驱功能安全设计
5.6.11 广汽埃安:高性能电驱技术路线(5)——动力性/NVH优化提升
5.6.12 广汽埃安:高性能电驱技术路线(6)——仿真及测试验证
5.6.13 广汽下一代N合一电驱:实现动力域与温控域的跨域集成
5.6.14 广汽:新能源纯电动整车控制系统
5.6.15 广汽:混动整车智能控制策略
5.6.16 广汽下一代星灵架构:中央运算单元负责动力控制和车身控制
5.7 零跑
5.7.1 零跑CTC电池底盘一体化和智能动力域控
5.7.2 零跑C01可变架构油冷三合一电驱(1)
5.7.3 零跑C01可变架构油冷三合一电驱(2)
5.7.4 零跑汽车LEAP3.0架构(1):中央超算平台实现四域算力融合
5.7.5 零跑汽车LEAP3.0架构(2):四域融合功能
5.8 上汽
5.8.1 上汽纯电系统平台:星云平台
5.8.2 上汽星云平台:“绿芯”电驱系统
5.8.3 上汽“绿芯”电驱系统(1):H-pin扁线永磁同步电机
5.8.4 上汽“绿芯”电驱系统(2):机械传动设计和热管理策略
5.8.5 上汽:汽车E/E架构布局下的VCU融合方式
5.8.6 上汽eTAC边缘扭矩控制技术:VCU与MCU集成
5.9 北汽
5.9.1 北汽新能源的动力总成发展
5.9.2 北汽新能源动力总成:高功率密度
5.9.3 北汽EMD3.0超级电控技术
5.9.4 北汽EEA2.0平台:以功能域为导向开发动力域
5.9.5 北汽中央集成架构VDC+VIU
5.10 理想
5.10.1 理想汽车:纯电战略
5.10.2 理想汽车:800V SiC 高压电驱系统
5.10.3 理想LEEA2.0 :XCU中央域控制器(动力、底盘、车身)
5.11 小鹏
5.11.1 小鹏G9 XPower 3.0动力系统
5.11.2 小鹏G9高压动力架构设计(1):800V高压系统工作分析
5.11.3 小鹏G9高压动力架构设计(2):四驱系统
5.11.4 小鹏 X-EEA 3.0架构:动力域进入中央超算
5.12 蔚来
5.12.1 蔚来全栈自研自制电驱动系统
5.12.2 蔚来第二代电驱动系统(1)
5.12.3 蔚来第二代电驱动系统(2):SiC功率模块的应用
5.12.4 蔚来ET5T电驱系统:前感应+后永磁
5.12.5 蔚来ET5T电驱系统拆解(1):前辅驱电机拆解
5.12.6 蔚来ET5T电驱系统拆解(2) :后主驱电机拆解
5.13 东风
5.13.1 东风电驱电控领域自制能力及产线规划
5.13.2 东风汽车iD2电驱动总成
5.13.3 东风汽车新一代电驱动产品:iD3电驱动总成
5.13.4 东风汽车iD3电驱动总成:70kW十合一电驱动
5.14 哪吒
5.14.1 哪吒电驱动总成生产模式:自研自产+开放合作
5.14.2 哪吒汽车浩智战略 2.0(1):全栈自研中央计算平台
5.14.3 哪吒汽车浩智战略 2.0(2):浩智超算——融合域控形式
5.14.4 哪吒汽车动力域控:向融合网关域控HPC演进
5.14.5 哪吒汽车浩智战略 2.0(3):浩智电驱——800V SiC电驱系统
5.14.6 哪吒:三合一电驱总成
06 国外动力总成控制器及解决方案供应商
6.1 博世
6.1.1 博世简介
6.1.2 博世:智能驾驶与控制业务(XC事业部)布局
6.1.3 博世VCU产品(1)
6.1.4 博世VCU产品(2)
6.1.5 博世VCU产品(3)
6.1.6 博世跨域车辆控制单元
6.2 纬湃科技
6.2.1 纬湃科技简介
6.2.2 纬湃科技:纯电领域产品布局,拥抱电气化
6.2.3 纬湃科技:新能源汽车动力总成控制产品演进路线
6.2.4 纬湃科技:应用案例
6.2.5 纬湃科技:动力域控制器PDCU200
6.3 联合电子
6.3.1 联合电子简介
6.3.2 联合电子:整车控制器VCU产品演进路线
6.3.3 联合电子:整车控制器VCU8.1
6.3.4 联合电子:针对海外市场推出VCU8.2——集成三类主流充电协议
6.3.5 联合电子针对跨域融合的VCU集成方案:整车运动域控制器VCU8.5
6.3.6 联合电子:整车运动域控制器VCU8.5(1)——协调控制的高低压部件
6.3.7 联合电子:整车运动域控制器VCU8.5(2)——主要功能
6.3.8 联合电子:基于中央集成架构的VCU集成方案(1)——整车计算平台VCP
6.3.9 联合电子:基于中央集成架构的VCU集成方案(2)——区域控制器
6.4 Ecotron
6.4.1 Ecotron简介
6.4.2 Ecotron:合作伙伴
6.4.3 Ecotron:纯电汽车整车控制器VCU产品
6.4.4 Ecotron:VCU产品参数对比(1)
6.4.5 Ecotron:VCU产品参数对比(2)
6.4.6 Ecotron:混动汽车整车控制器HCU
6.4.7 Ecotron:HCU产品参数
6.5 采埃孚
6.5.1 采埃孚简介
6.5.2 采埃孚:车辆运动域控制器VMD
6.6 马瑞利
6.6.1 马瑞利简介
6.6.2 马瑞利:集成的多域控制器
6.6.3 马瑞利:行驶动力域控制器VDCM
07 国内动力总成控制器及解决方案供应商
7.1 经纬恒润
7.1.1 经纬恒润简介
7.1.2 经纬恒润:生产基地及生产模式
7.1.3 经纬恒润汽车电子产品线布局
7.1.4 经纬恒润新能源动力系统业务
7.1.5 经纬恒润:整车控制器VCU/HCU功能及配套客户
7.1.6 经纬恒润:乘用车EVCU产品演进路线
7.1.7 经纬恒润:商用车CVCU产品演进路线
7.1.8 经纬恒润:新能源动力总成控制系统集成路径
7.1.9 经纬恒润:基于下一代E/E架构的动力域集成方案(1)
7.1.10 经纬恒润:基于下一代E/E架构的动力域集成方案(2)——中央计算平台产品CCP
7.1.11 经纬恒润:基于下一代E/E架构的动力域集成方案(3)——前舱区域控制器FZCU
7.1.12 经纬恒润:各区域控制器ZCU可实现的功能
7.2 奥海科技
7.2.1 奥海科技简介
7.2.2 奥海科技:2022年经营状况及研发投入
7.2.3 奥海科技:全球生产基地布局
7.2.4 奥海科技:业务布局
7.2.5 奥海科技:新能源汽车业务领域布局情况
7.2.6 奥海科技:动力域控制器将成为第二增长曲线
7.3 东软睿驰
7.3.1 东软睿驰简介
7.3.2 东软睿驰:自定义控制单元——xCU产品解决方案
7.3.3 东软睿驰:EV动力域控制解决方案VBS
7.3.4 东软睿驰:基于动力域应用的整车通用域控制器
7.4 华夏龙晖
7.4.1 华夏龙晖简介
7.4.2 华夏龙晖:多域控制器平台方案(1)——模块化、积木化的开发方式
7.4.3 华夏龙晖:多域控制器平台方案(2)——多域控制器平台硬件架构
7.4.4 华夏龙晖:多域控制器在动力域中的应用(1)——底盘域上融合动力域
7.4.5 华夏龙晖:多域控制器在动力域中的应用(2)——基于变速箱的动力域控制器
7.5 易鼎丰
7.5.1 易鼎丰简介
7.5.2 易鼎丰:VCU产品演进路线
7.5.3 易鼎丰:VCU集成路线
7.5.4 易鼎丰:VCU4200实现全国产化替代
7.5.5 易鼎丰:整车动力域控制器DCU3000
7.6 金脉电子
7.6.1 金脉电子简介
7.6.2 金脉电子:汽车电子产品线
7.6.3 金脉电子:整车控制器VCU
7.6.4 金脉电子:多合一动力总成控制器
7.7 巨一动力
7.7.1 巨一动力简介
7.7.2 巨一动力:动力总成集成化技术发展三阶段
7.7.3 巨一动力:未来倾向于将动力系统相关控制器和芯片集成
7.7.4 巨一动力:800V碳化硅动力域控制器产品
7.8 峰智睿联
7.8.1 峰智睿联简介
7.8.2 峰智睿联:动力域开发核心技术及优势
7.8.3 峰智睿联:产品布局及客户群分析
7.8.4 峰智睿联智能动力域控制器i-PDCU
7.9 中科晶上
7.9.1 中科晶上简介
7.9.2 中科晶上:国产核心通用动力域控制器VCU
7.9.3 中科晶上:通用动力域控制器应用部署
7.10 航盛电子
7.10.1 航盛电子简介
7.10.2 航盛电子:客户群分析
7.10.3 航盛电子:新能源三电控制系统布局
7.10.4 航盛电子:整车控制器VCU
7.11 钧联电子
7.11.1 钧联电子简介
7.11.2 钧联电子:车用800V多融合碳化硅动力域控制器研发进展