随着高精度地图资质监管收紧,地图采集成本、更新频率、覆盖范围等问题凸显,以及城市NOA的快速发展,2023年“轻地图”的智驾方案成为热门话题,该方案降低了对离线高精度地图的依赖,高精度地图的发展遇到挑战。
从自动驾驶的发展进程看,一段时间内将持续处于人机共驾阶段,这个阶段对地图的需求并不一定是要高精度地图,针对不同地图互补特性整合的多源地图可能更适合该阶段的自动驾驶需求。
新一代自动驾驶地图发展情况下,各方如何应对?
• 政府:收紧高精度地图测绘甲级资质的同时,积极推进高辅地图(高级辅助驾驶地图)的审图、乙级测绘资质等审查工作。
2023年6月国家自然资源部地图技术审查中心公布了全国城市普通道路高级辅助驾驶地图审图工作的阶段性进展,允许企业批量送审全国城市普通道路高级辅助驾驶地图。目前,四维图新过审全国城市高辅地图数据覆盖30个省份120个城市;百度地图过审134座城市的高级辅助驾驶地图。
主流图商高辅地图许可情况
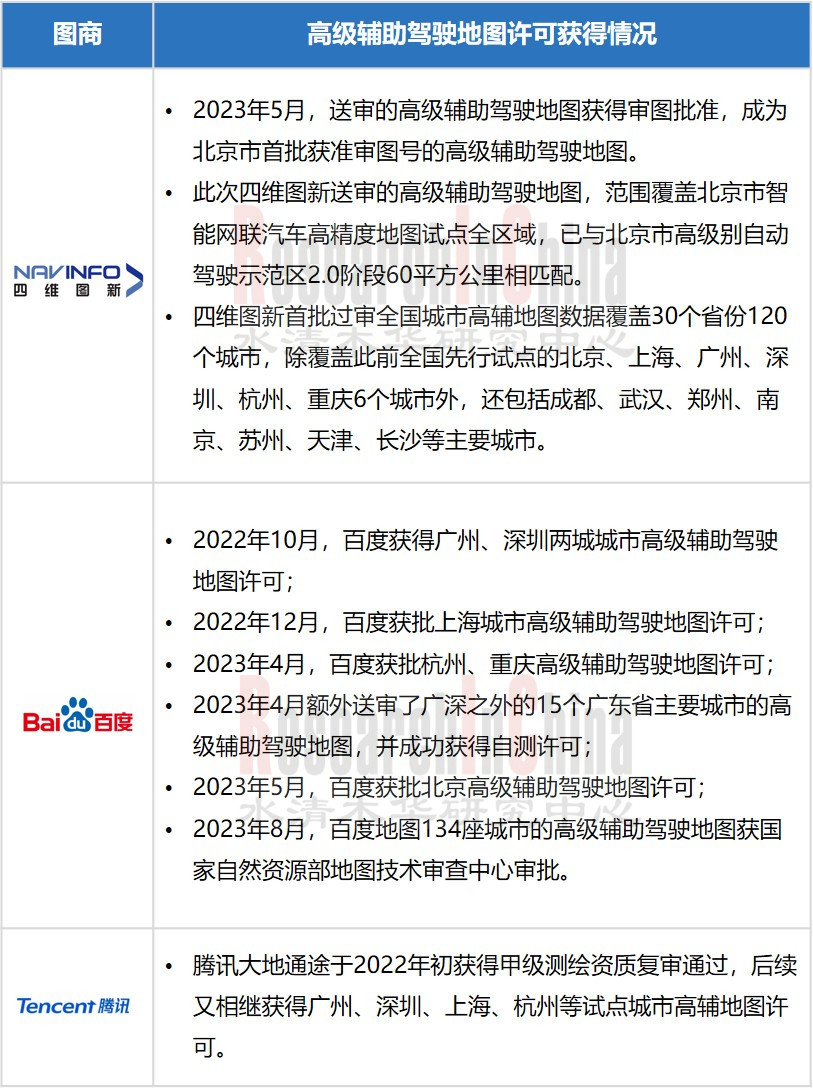
来源:佐思汽研《2024年自动驾驶地图行业研究报告》
• 主机厂:相关部门对导航电子地图测绘甲级资质的收紧,打击了主机厂布局地图测绘甲级资质的积极性。目前一部分主机厂通过神经网络大模型算法等实现实时建图,削弱对离线高精度地图的依赖,以特斯拉、理想、小鹏、华为ADS加持车型为代表;另一些主机厂则寻求稳健,通过申请乙级测绘资质或与图商合资成立新公司等形式来获取测绘资质,如广汽与南京市测绘勘察研究院股份有限公司等合作方共同投资设立“广东广祺舆图股权投资合伙企业(有限合伙)、蔚来下属公司安徽蔚来智行科技有限公司申请互联网地图服务甲级资质等。
• 图商:顺应市场需求推出“轻地图”方案,将SD数据、HD数据、LD数据等放到一张图上,保证导航的连贯性。此外以腾讯为例,在推出“三合一”智驾地图之后又进一步推出“智驾云图”, 支持图商、车企、自动驾驶公司等角色协同共建。
新势力车厂率先开启“轻地图”方案
目前主机厂不依赖高精度地图的方案,不是真正意义上的完全不用地图,而是对高精度地图的地图元素做减法或者在导航地图上做加法。
在“轻地图”方案上布局比较积极的主要是新势力车厂,原因之一是新势力车厂城市NOA功能推进速度较快,而高精度地图无法匹配相关需求。
部分主机厂的“轻地图”方案
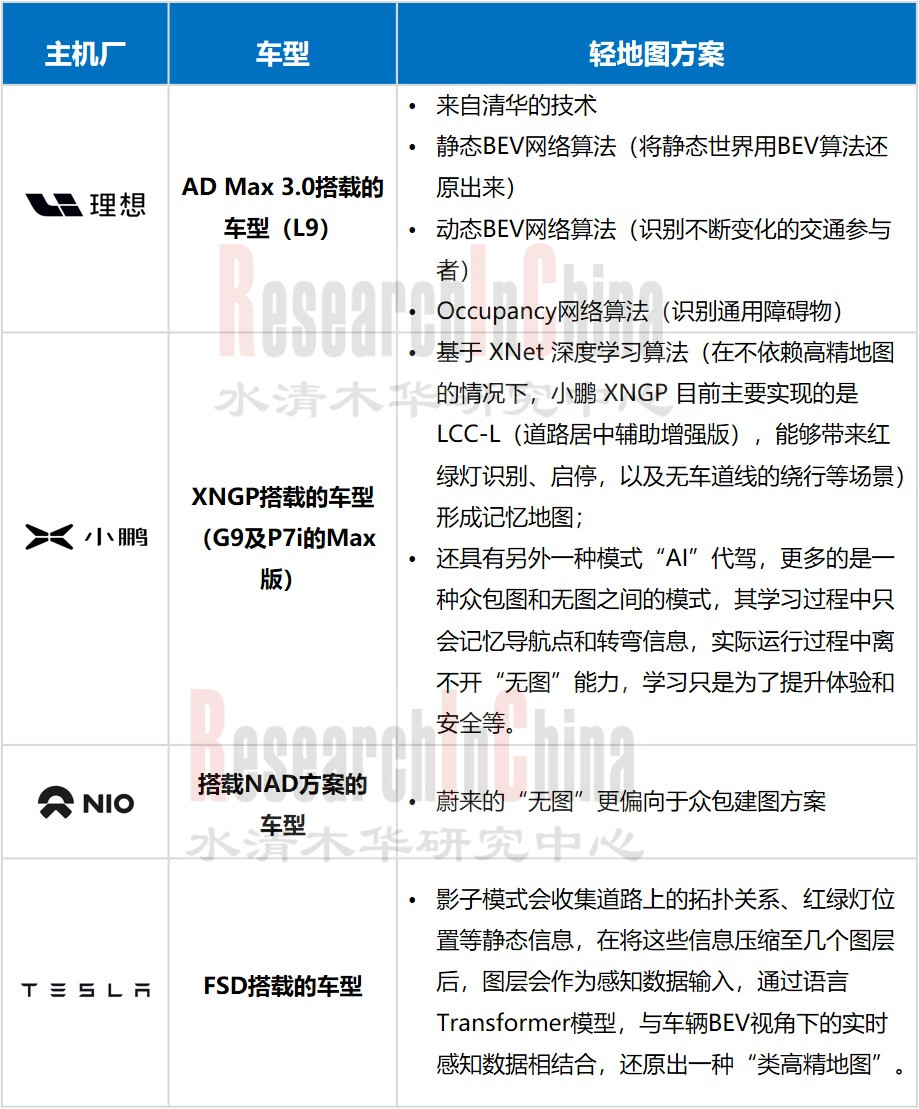
来源:佐思汽研《2024年自动驾驶地图行业研究报告》
小鹏
2023年上半年开始基于SD地图研发智驾方案,使用高精度地图的NGP和不使用高精度地图的NGP采用的是同一套技术栈,区别仅仅是把原先高精地图的输入,换成了导航地图的输入和实时感知对导航信息的理解。
小鹏不使用高精度地图的方案相比使用高精度地图的方案具有泛化速度快4~10倍,彻底解决数据鲜度,降低成本、普及智驾等优势。
小鹏实现的“无离线高精度地图”就是依靠XNet来实时构建“高精地图”。
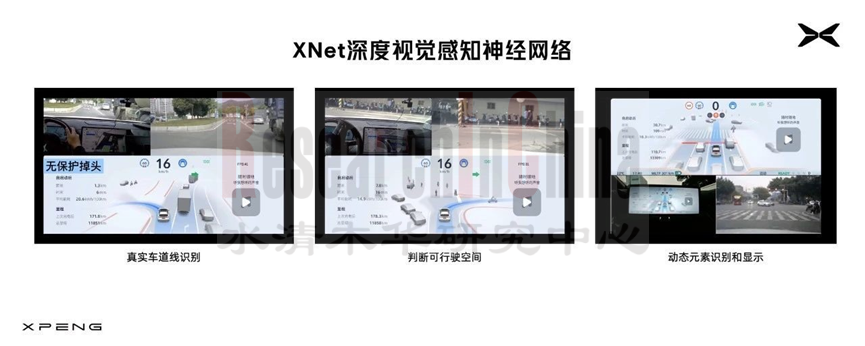
来源:小鹏
理想
理想在2023年开启城市NOA,该方案不依赖高精度地图,主要是构建路口的特征用于协助实时感知建图,概括来说就是路段“无图”,路口采用众包建图。
目前,理想在推进NPN方案,希望解决地图的在线更新问题。
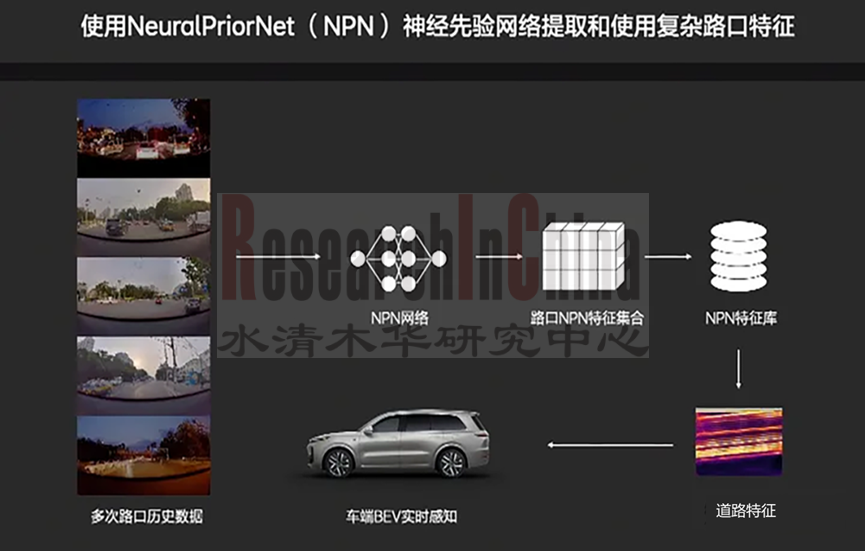
来源:理想
从主机厂的方案看,“轻地图”方案虽然对高精度地图的依赖度降低,但对车端感知和算法的要求变得更高。
传统图商顺应需求推出轻量化自动驾驶地图解决方案
主机厂“不依赖高精度地图”的呼声越来越高,传统图商也在顺应市场需求,做出改变,积极改善高精度地图的三大痛点:更新频率、覆盖面积、成本,推出更符合现阶段自动驾驶需求的地图产品。
主流图商智驾地图布局

来源:佐思汽研《2024年自动驾驶地图行业研究报告》
百度
2023年7月,推出人机共驾地图Baidu MapAuto 6.5,是全3D车道级地图、是全场景人机共驾地图,可以提供SD、LD和HD三种数据。其中,SD数据已覆盖全国,当前已在1000万车辆上搭载。LD百度轻地图数据服务由车道级拓扑、复杂场景几何、经验图层、动态信息图层组成,实现了天级更新。
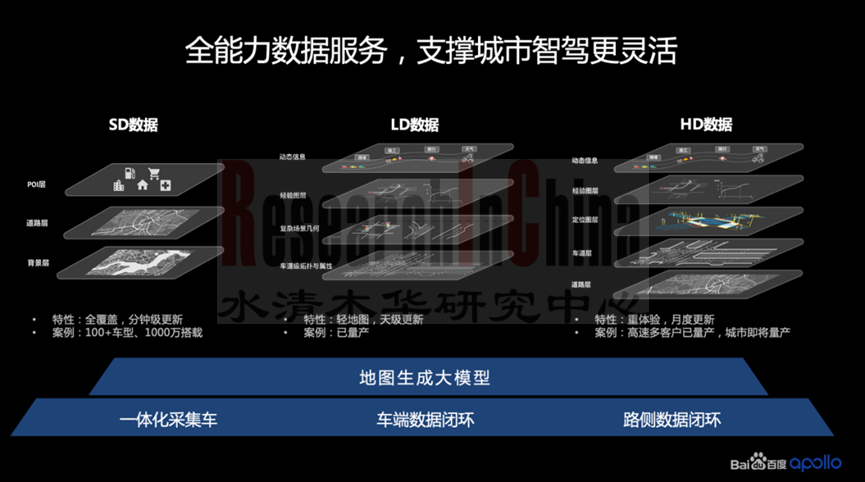
来源:百度
高德
2023年6月推出全新的HQ Live MAP,融合了HD MAP和SD MAP的优点。HQ Live MAP虽在精度方面无法达到HD MAP(绝对精度50cm,相对精度10cm)的细致程度,但对于高级辅助驾驶的场景来说也已足够(高速和城市快速路场景:绝对精度1m,相对精度30cm;城区普通路场景:相对精度1m),同时还简化了城区普通路场景中不必要的地图元素,进一步降低了制作和部署成本。
腾讯
2023年9月发布最新的智驾云图,实现自动驾驶地图的全面云化,支持要素级、分钟级在线更新,并且支持图商、车企、自动驾驶公司等角色协同共建。
腾讯智驾云图拥有可扩展的多图层形态,包含基础地图图层、更新要素图层、ODD动态图层、驾驶经验图层、运营图层等,车企可根据自身需求灵活配置并管理图层,并通过与车企自身数据图层结合,搭建适合自身的数据驱动运营平台。

来源:腾讯
佐思汽研《2024年自动驾驶地图行业研究报告》主要研究内容如下:
•自动驾驶地图相关政策、法规、标准等制定情况研究;
•城市NOA发展下车载地图的发展方向、传统图商应对策略,城市NOA用的主要地图种类等情况研究;
•高精度地图市场现状、市场规模、企业格局、商业模式、发展难点等情况研究;
•智驾地图不同的应用场景,包括乘用车高速自动驾驶、低速泊车、无人驾驶载人、无人驾驶载物等情况研究;
•国内外主要图商的地图产品系列、新产品布局、产品应用合作等情况研究;
•高精度地图相关技术支持公司主要技术布局、新技术研发等情况研究。
1 自动驾驶用地图政策标准及法规现状
1.1 自动驾驶地图相关政策
1.1.1 2023年最新政策:《智能汽车基础地图标准体系建设指南(2023版)》发布(1)
1.1.2 2023年最新政策:《智能汽车基础地图标准体系建设指南(2023版)》发布(2)
1.1.3 2023年最新政策:《北京市智能网联汽车高精度地图试点工作指导意见》
1.1.4 2023年最新政策:《杭州市智能网联汽车高精度地图管理规定》
1.2 自动驾驶地图相关法规
1.2.1 国外高精度地图相关法规
1.2.2 国内高精度地图相关法规
1.2.3 2023年最新法规:国家监管部门允许全国城市级道路送审
1.2.4 2023年最新法规:提高高精地图的审图效率
1.3 自动驾驶地图相关标准
1.3.1 国外高精度地图标准制定现状
1.3.2 中国高精度地图标准定制现状(发布)
1.3.3 中国高精度地图标准定制现状(预研)
1.3.4 2023年高精地图标准建设情况:《智能网联汽车自动驾驶地图增量更新》立项(1)
1.3.5 2023年高精地图标准建设情况:《智能网联汽车自动驾驶地图增量更新》立项(2)
2 自动驾驶地图市场发展现状
2.1 自动驾驶地图发展方向
2.1.1 车载地图分类:导航地图、ADAS地图、高精度地图
2.1.2 自动驾驶目前处于人机共驾阶段
2.1.3 人机共驾阶段对车载地图产业带来的挑战
2.1.4 人机共驾阶段车载地图的框架
2.1.5 车载地图装配率趋势:导航地图、ADAS地图、高精度地图
2.2 自动驾驶地图分类:导航地图(SD Map)
2.2.1 车载导航地图由2D向3D升级
2.2.2 3D导航地图布局案例:腾讯
2.2.3 “无图”智驾方案下导航地图提供基础数据(1)
2.2.4 “无图”智驾方案下导航地图提供基础数据(2)
2.2.5 主流导航地图的装车情况
2.2.6 中国乘用车导航地图装配量与装配率
2.2.7 中国乘用车导航地图装配量与装配率(分价格)
2.2.8 中国乘用车导航地图装配量与装配量(TOP20车型)
2.2.9 中国乘用车导航地图装配量与装配量(TOP20品牌)
2.3 自动驾驶地图分类:ADAS地图(SD Pro MAP 高辅地图)
2.3.1 ADAS(高辅)地图的类别
2.3.2 高辅地图生产流程
2.3.3 高辅地图生产流程一
2.3.4 高辅地图生产流程二
2.3.5 高辅地图生产流程三
2.3.6 高辅地图关键技术点:大模型技术
2.3.7 ADAS(高辅)地图方案:主流图商提前建图
2.3.8 ADAS(高辅)地图方案:部分厂商通过算法在线建图(1)
2.3.9 ADAS(高辅)地图方案:部分厂商通过算法在线建图(2)
2.3.10 Tier 1高辅地图方案:百度智驾方案建图技术(1)
2.3.11 Tier 1高辅地图方案:百度智驾方案建图技术(2)
2.3.12 Tier 1高辅地图方案:元戎启行Driver 3.0(1)
2.3.13 Tier 1高辅地图方案:元戎启行Driver 3.0(2)
2.3.14 Tier 1高辅地图方案:智驾科技青云架构
2.3.15 Tier 1高辅地图方案:智驾科技自动化建图记忆
2.3.16 Tier 1高辅地图方案:觉非科技+地平线
2.3.17 Tier 1高辅地图方案:华为
2.3.18 Tier 1高辅地图方案:Momenta无图智能驾驶算法方案(1)
2.3.19 Tier 1高辅地图方案:Momenta无图智能驾驶算法方案(2)
2.3.20 Tier 1高辅地图方案:Momenta无图智能驾驶算法路径图
2.3.21 ADAS地图(高辅地图)装车情况(1)
2.3.22 ADAS地图(高辅地图)装车情况(2)
2.3.23 主机厂高辅地图方案:特斯拉FSD(1)
2.3.24 主机厂高辅地图方案:特斯拉FSD(2)
2.3.25 主机厂高辅地图方案:岚图城市道路高精度定位方案
2.3.26 高辅地图发展趋势:SD/HD地图一体化生产
2.4 自动驾驶地图分类:高精地图(HD MAP)
2.4.1 高精地图(HD MAP)
2.4.2 感知与高精地图互补提升城市NOA安全性
2.4.3 三大量产图商对比
2.4.4 主机厂对于高精地图的态度
2.4.5 高精度地图发展路线
2.5 城市NOA驱动下传统图商如何布局?
2.5.1 城市NOA成为乘用车自动驾驶新战场
2.5.2 多源融合自动驾驶地图可有效解决城市NOA难题
2.5.3 城市NOA场景下,图商重点部署SD Pro MAP 高阶ADAS地图
2.5.4 SD Pro MAP 高阶ADAS地图基本要求
2.5.5 城市NOA驱动下图商的布局思路:打造一张图和轻地图模式
2.5.6 图商的布局策略 (1)
2.5.7 图商的布局策略 (2)
2.5.8 图商的布局策略 (3)
2.5.9 图商的布局策略 (4)
2.6 主机厂的自动驾驶地图选择
2.6.1 主机厂的自动驾驶地图选择(1)
2.6.2 主机厂的自动驾驶地图选择(2)
3 高精度地图市场现状
3.1 高精度地图市场规模
3.1.1 中国乘用车前装高精地图市场规模(1)
3.1.2 中国乘用车前装高精地图市场规模(2)
3.1.3 2022-2023年中国量产乘用车高精度地图车型销量TOP 10
3.1.4 2022-2023年中国量产乘用车高精度定位车型价格区间
3.2 高精度地图市场竞争格局
3.2.1 高精度地图市场主要玩家
3.2.2 高精度地图市场玩家一:国内图商(1)
3.2.3 高精度地图市场玩家一:国内图商(2)
3.2.4 高精度地图市场玩家二:主机厂高精度地图布局
3.2.5 高精度地图市场玩家二:主机厂高精度地图自研之路面临困境
3.2.6 主机厂地图困境解决方案 (1)
3.2.7 主机厂地图困境解决方案 (2)
3.2.8 高精度地图市场玩家三:国外图商
3.3 高精度地图落地的商业模式
3.3.1 高精度地图商业模式一:自动驾驶
3.3.2 高精度地图商业模式二:停车场
3.3.3 高精度地图盈利模式分类
3.3.4 高精度地图业务模式总结:国内图商(1)
3.3.5 高精度地图业务模式总结:国内图商(2)
3.3.6 高精度地图业务模式总结:国外图商
3.3.7 城市NOA发展下地图供应商业务模式变化
3.4 高精度地图发展难点
3.4.1 高精度地图面临发展瓶颈
3.4.2 高精度地图发展难点一
3.4.3 高精度地图发展难点二
3.4.4 高精度地图发展难点三
3.4.5 高精度地图发展难点四
3.5 高精度地图数据分发与融合
3.5.1 高精度地图数据分发与融合流程
3.5.2 流程一:高精度地图数据分发引擎架构
3.5.3 流程一:高精度地图数据分发引擎集成形态
3.5.4 流程一:高精数据分发引擎主要供应商
3.5.5 流程二:高精度地图数据格式转换(1)
3.5.6 流程二:高精度地图数据格式转换(2)
3.5.7 流程三:高精度地图数据分发与接收端的交互
3.5.8 流程四:高精度地图数据融合
3.5.9 高精度地图数据分发融合趋势
3.6 高精度地图应用于车道级定位
3.6.1 基于高精度地图的车道级定位方案结构
3.6.2 基于高精度地图的车道级定位方案供应商
3.6.3 案例
4 主机厂智驾地图应用布局
4.1 不同等级自动驾驶对地图要素的需求
4.1.1 自动驾驶对地图要素的要求:L2级NOA功能
4.1.2 自动驾驶对地图要素的要求:L2级Hands Free功能
4.1.3 自动驾驶对地图要素的要求:L3级
4.1.4 自动驾驶对地图要素的要求:L4级以上
4.2 主机厂乘用车智驾地图搭载分析
4.2.1 自主品牌量产乘用车智驾地图搭载情况(1)
4.2.2 自主品牌量产乘用车智驾地图搭载情况(2)
4.2.3 自主品牌量产乘用车智驾地图搭载情况(3)
4.2.4 自主品牌量产乘用车智驾地图搭载情况(4)
4.2.5 自主品牌量产乘用车智驾地图搭载情况(5)
4.2.6 自主品牌量产乘用车智驾地图搭载情况(6)
4.2.7 自主品牌量产乘用车智驾地图搭载情况(7)
4.2.8 自主品牌量产乘用车智驾地图搭载情况(8)
4.2.9 合资品牌量产乘用车智驾地图搭载情况
4.2.10 主机厂智驾地图装车案例一:广汽Aion高精度地图的解决方案
4.2.11 主机厂智驾地图装车案例一:广汽Aion电子视野线系统
4.2.12 主机厂智驾地图装车案例一:广汽Aion高精度地图曲率和坡度
4.2.13 主机厂智驾地图装车案例二:小鹏基于高精地图实现城市辅助驾驶
4.2.14 主机厂智驾地图装车案例二:小鹏XNGP升级“无图”方案(1)
4.2.15 主机厂智驾地图装车案例二:小鹏XNGP升级“无图”方案(2)
4.2.16 主机厂智驾地图装车案例二:小鹏XNGP升级“无图”方案(3)
4.2.17 主机厂智驾地图装车案例三:长城WEY借助高精度地图实现点对点自动驾驶
4.2.18 主机厂智驾地图装车案例四:理想搭载高精度地图
4.2.19 主机厂智驾地图装车案例四:理想AD Max 3.0升级“无图”方案
4.2.20 主机厂智驾地图装车案例四:理想使用在线建图技术(1)
4.2.21 主机厂智驾地图装车案例四:理想使用在线建图技术(2)
4.2.22 主机厂智驾地图装车案例五:蔚来融合高精度地图的NOP
4.2.23 主机厂智驾地图装车案例五:蔚来谨慎探索“无图”方案
4.2.24 主机厂智驾地图装车案例六
4.2.25 主机厂智驾地图装车案例七
4.2.26 主机厂智驾地图装车案例八
4.2.27 主机厂智驾地图装车案例九
4.3 细分场景智驾地图应用:乘用车低速泊车
4.3.1 AVP地图类别一:高精度地图
4.3.2 AVP地图类别一:SLAM实时地图
4.3.3 停车场泊车地图五大供应商
4.3.4 装车案例一:阿维塔泊车功能建图方式
4.4 细分场景智驾地图应用:无人驾驶载物
4.4.1 高精度地图对低速无人载物的重要性
4.4.2 低速无人载物用高精度地图建图方法
4.4.3 无人驾驶载物高精度地图供应商格局(1)
4.4.4 无人驾驶载物高精度地图供应商格局(2)
4.5 细分场景智驾地图应用:无人驾驶载人
4.5.1 高精度地图对高阶(无人)自动驾驶的重要性
4.5.2 无人驾驶载人应用场景 (1)
4.5.3 无人驾驶载人应用场景 (2)
4.5.4 无人驾驶载人应用场景 (3)
5 国内外图商研究
5.1 百度地图
5.1.1 百度自动驾驶架构调整:收敛L4/L2方案
5.1.2 百度致力于构建适合自动驾驶的地图
5.1.3 百度车载地图产品体系
5.1.4 百度车载地图产品一:导航地图
5.1.5 百度车载地图产品二:人机共驾地图Baidu MapAuto 6.5(1)
5.1.6 百度车载地图产品二:人机共驾地图Baidu MapAuto 6.5(2)
5.1.7 百度车载地图产品二:人机共驾地图Baidu MapAuto 6.5(3)
5.1.8 百度车载地图产品三:高精度地图(1)
5.1.9 百度车载地图产品三:高精度地图(2)
5.1.10 地图是百度自动驾驶系统的核心竞争力之一
5.1.11 百度“熟路”地图核心价值一:安全(1)
5.1.12 百度“熟路”地图核心价值一:安全(2)
5.1.13 百度“熟路”地图核心价值二:舒适
5.1.14 百度“熟路”地图核心价值三:高效
5.1.15 百度轻成本构建智驾地图技术一:建图
5.1.16 百度轻成本构建智驾地图技术二:自动化特征提取
5.1.17 相较高精地图,百度自动驾驶地图进行减负
5.2 四维图新
5.2.1 四维图新车载地图产品体系
5.2.2 四维图新车载地图产品一:导航地图
5.2.3 四维图新车载地图产品二:场景地图(1)
5.2.4 四维图新车载地图产品二:场景地图(2)
5.2.5 四维图新车载地图产品三:高精地图(1)
5.2.6 四维图新车载地图产品三:高精地图(2)
5.2.7 四维图新车载地图产品三:高精地图(3)
5.2.8 四维图新车载地图产品三:高精地图(4)
5.2.9 四维图新智驾地图应用案例一
5.2.10 四维图新智驾地图应用案例二
5.2.11 四维图新智驾地图应用案例三
5.3 高德地图
5.3.1 高德车载地图产品一
5.3.2 高德车载地图产品二
5.3.3 高德车载地图产品三
5.3.4 高德HD地图与SD地图的匹配
5.4 腾讯
5.4.1 腾讯“车云一体化”战略布局
5.4.2 腾讯车载地图产品一:导航地图
5.4.3 腾讯车载地图产品二:智驾云图(1)
5.4.4 腾讯车载地图产品二:智驾云图(2)
5.4.5 腾讯车载地图产品三
5.4.6 腾讯车载地图产品四
5.4.7 “轻地图”模式下腾讯应对策略:与Tier 1深度合作(1)
5.4.8 “轻地图”模式下腾讯应对策略:与Tier 1深度合作(2)
5.5 晶众地图
5.5.1 晶众地图车载地图业务介绍
5.5.2 晶众地图车载地图产品:AVP高精度地图(1)
5.5.3 晶众地图车载地图产品:AVP高精度地图(2)
5.6 美行科技
5.6.1 美行科技业务布局
5.6.2 美行科技车载地图产品一:众源地图技术
5.6.3 美行科技车载地图产品二:高精度地图数据
5.6.4 美行科技车载地图产品三:高精度地图融合平台
5.6.5 “轻地图”模式下美行科技应对策略
5.7 华为
5.7.1 华为车载地图产品(1)
5.7.2 华为车载地图产品(2)
5.7.3 华为车载地图产品(3)
5.7.4 华为车载地图应用:ADS高阶自动驾驶系统
5.8 中海庭
5.8.1 中海庭基于地图的产品线
5.8.2 中海庭车载地图产品(1)
5.8.3 中海庭车载地图产品(2)
5.8.4 中海庭高精度地图应用场景一:泊车
5.8.5 中海庭高精度地图应用场景二:高速/城区辅助驾驶
5.9 京东
5.9.1 京东物流打造“与图”平台(1)
5.9.2 京东物流打造“与图”平台(2)
5.10 立得空间
5.10.1 立得空间基于高精度地图的自动驾驶技术
5.10.2 立得空间停车场高精度地图应用
5.11 易图通
5.11.1 易图通车载地图产品:停车场高精地图(1)
5.11.2 易图通车载地图产品:停车场高精地图(2)
5.11.3 易图通车载地图产品:高精地图云平台
5.11.4 易图通车载地图应用:自动驾驶仿真测试
5.12 Momenta
5.12.1 “轻地图”模式下Momenta应对策略
5.12.2 Momenta无图方案算法:车道线识别
5.12.3 Momenta无图方案算法:定位
5.12.4 Momenta无图方案算法:规控
5.12.5 Momenta算法迭代路径
5.13 全道科技
5.13.1 全道科技轻高精地图自动化建图与更新
5.13.2 全道科技对轻高精地图要素的取舍
5.13.3 全道科技轻地图闭环解决方案(1)
5.13.4 全道科技轻地图闭环解决方案(2)
5.14 Here
5.14.1 Here地图演进方式
5.14.2 Here注重地图信息安全
5.14.3 Here推出UniMap制图平台
5.14.4 Here高精地图在华布局
6 高精度地图相关技术公司研究
6.1 Mobileye
6.1.1 Mobileye重点布局轻地图业务(1)
6.1.2 Mobileye重点布局轻地图业务(2)
6.1.3 Mobileye REM优势
6.2 英伟达
6.2.1 英伟达车载地图业务:DeepMap地图
6.2.2 英伟达车载地图产品:DRIVE Map(1)
6.2.3 英伟达车载地图产品:DRIVE Map(2)
6.3 DeepMotion
6.3.1 DeepMotion被小米收购
6.3.2 DeepMotion高精地图技术方案
6.3.3 DeepMotion高精地图特点
6.4 Mapbox
6.4.1 Mapbox车载地图产品:导航地图
6.4.2 Mapbox车载地图产品:高精度地图
6.4.3 Mapbox中国市场失利