《2023-2024年全球与中国汽车操作系统研究报告》发布
国产化操作系统开始发力
2023年,华为、斑马智行、小米、蔚来等国产厂商纷纷在操作系统市场发力,推出具备竞争力优势的操作系统版本,适配了国产芯片方案并获得主机厂定点项目。
2023年汽车操作系统市场动态

图片来源:佐思汽研整理
譬如,小米、蔚来等推出了整车操作系统,普华和中兴等供应商加强了操作系统微内核的实时、安全等功能。
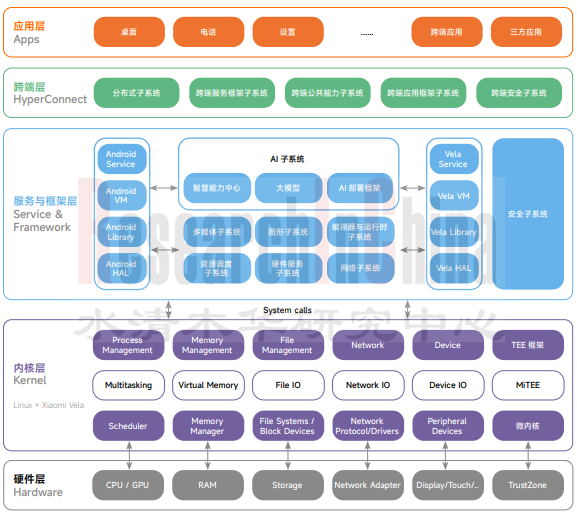
2023年10月,小米推出自研的HyperOS,底层采用Linux与Vela内核融合,中间件接入AI子系统,在多任务处理流程中设置优先级,采取分级调度的形式提升操作系统处理效率。
在生态上,小米打造了CarIoT生态,打通互联网IoT与汽车领域,实现“人车家全生态”理念。
小米HyperOS架构
图片来源:小米
在中间件方案中,Autosar 依然成为多数主机厂在车控、自动驾驶领域的选择之一,但其与国产芯片不能完全适配,且现场通信处理的反馈时间偏长,不能完全满足车企需求,导致部分供应商和主机厂自研微内核与中间件。2023年5月,中国汽车工业协会正式发布中国车用操作系统开源计划中首个微内核开源项目,该项目计划在2025年实现基于开源微内核的自主车用操作系统,并逐步替代QNX。其中,开源微内核由中电科普华基础软件提供,采用木兰公共许可证(第2版);芯片由芯驰科技提供,型号为G9X。
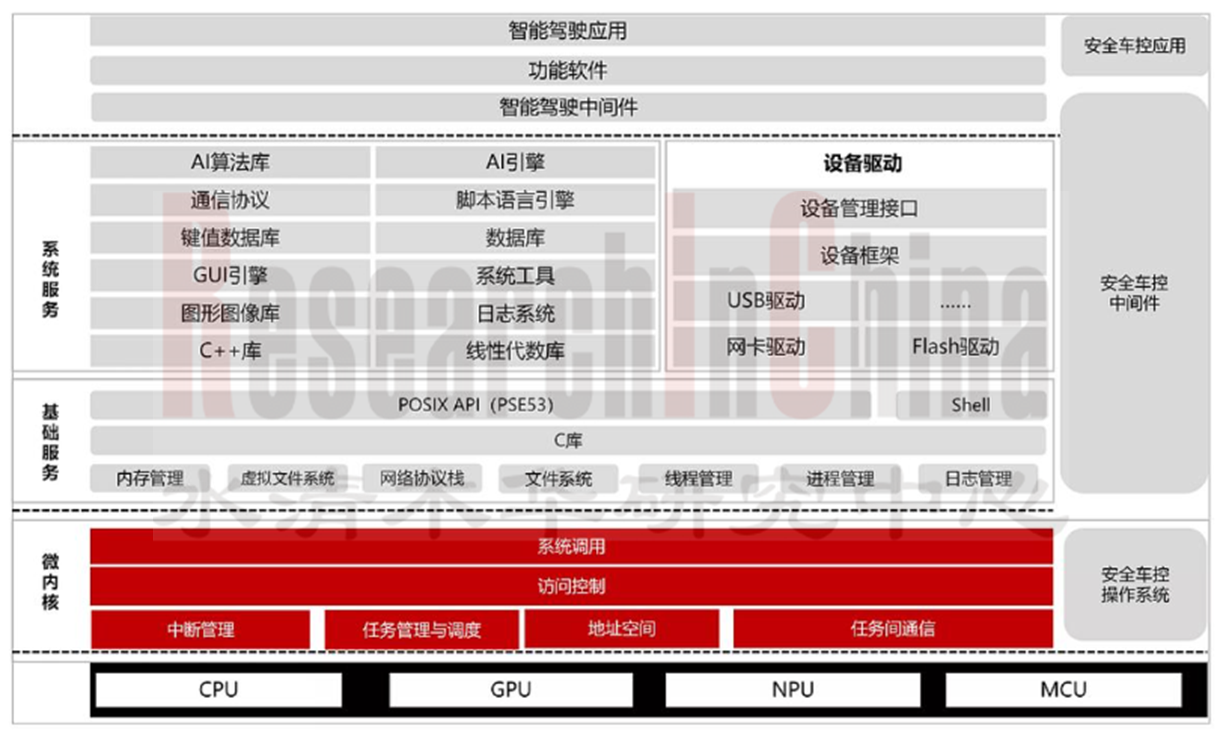
普华提供的“龘”(EasyAda)微内核可以实现面向各类芯片平台和应用场景提供安全内核;针对汽车领域,中电科普华基础软件对该微内核进行了相应的实时性改进机制,如面向自动驾驶大规模运算时,基于优先级的抢占机制,微内核的抢占调度策略,以及集成算法,中断、延时机制等技术手段,来改进微内核实时性方面的表现,以突破实时性和性能要求。
普华的“龘”微内核架构
图片来源:普华
主机厂:实现整车操作系统的三种方式
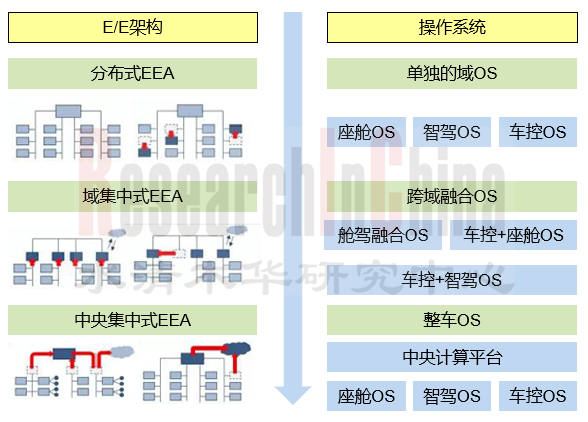
汽车操作系统演进路线
图片来源:佐思汽研
随着EE架构向中央计算架构发展的背景下,软件系统开始向SOA架构演变,其中操作系统开始由域操作系统向整车操作系统演进。
整车操作系统是基于SOA架构,通过中央计算平台融合座舱操作系统、智驾操作系统、安全车控操作系统的功能,从而提供同一套编程接口的整车级平台,特点是分层解耦、架构统一,通过提供统一接口,提升车企开发效率。整车操作系统通过集中调度硬件资源和算力,实现整车各域功能的调度和融合。
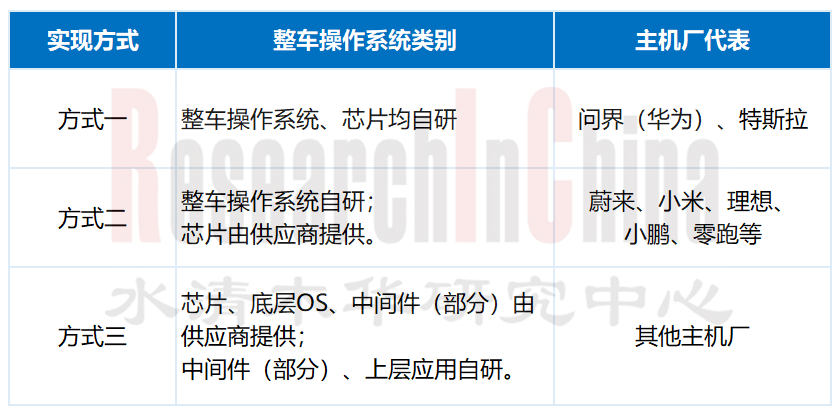
佐思汽研认为, 整车操作系统的实现方式可分为三个层级,如下表所示:
整车操作系统的三种实现方式
图片来源:佐思汽研
方式一,以华为为例:
2023年4月,华为推出iDVP智能数字底座(即整车操作系统),该平台为基于SOA架构设计的数字底座,融合了华为各个域操作系统(智驾操作系统AOS,座舱操作系统HOS、车控操作系统VOS)的功能,通过原子服务层实现软硬件解耦,从而实现跨车型开发的快速适配。
华为iDVP智能数字底座方案

图片来源:华为
2023年,搭载iDVP平台的代表车型为智界S7,该车型的途灵底盘基于iDVP智能数字底座开发,并通过iDVP智能数字底座配置的HUAWEI xMotion等原生应用,实现对车辆的驱动、制动、转向、悬架进行中央协同控制。2024年,iDVP平台计划有7款车上市。
方式二,以蔚来为例:
2023年9月,蔚来发布整车操作系统“天枢Sky OS”,采用自研的微内核与虚拟机取代了QNX内核服务。该整车操作系统分为四个模块,其中SkyOS-M模块基于自研微内核构建,具备强实时性与安全性,该微内核架构上配置舱驾一体的虚拟机体系,搭载于蔚来NT 3.0平台;SkyOS-L模块则采用自研的中间件平台,代替Autosar方案。
天枢SkyOS架构
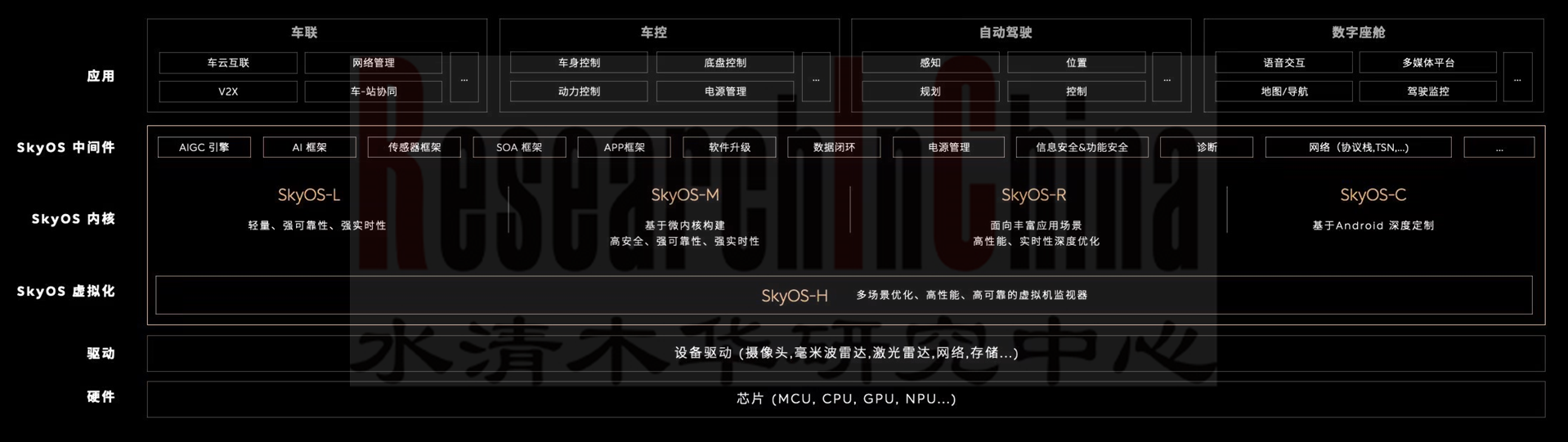
图片来源:蔚来汽车
在操作系统研发的过程中,蔚来发布多项技术,包括用于实现多核处理系统上的任务调度和提升任务调度效率等技术。其中,在多核处理系统上调度目标任务采用了多层调度模型,并搭载公平轮询算法/最空闲优先算法等,整车操作系统能够通过感知功能群,协调不同的工况下的硬件资源(算力、传感器)。
用于在多核处理系统上调度目标任务的流程
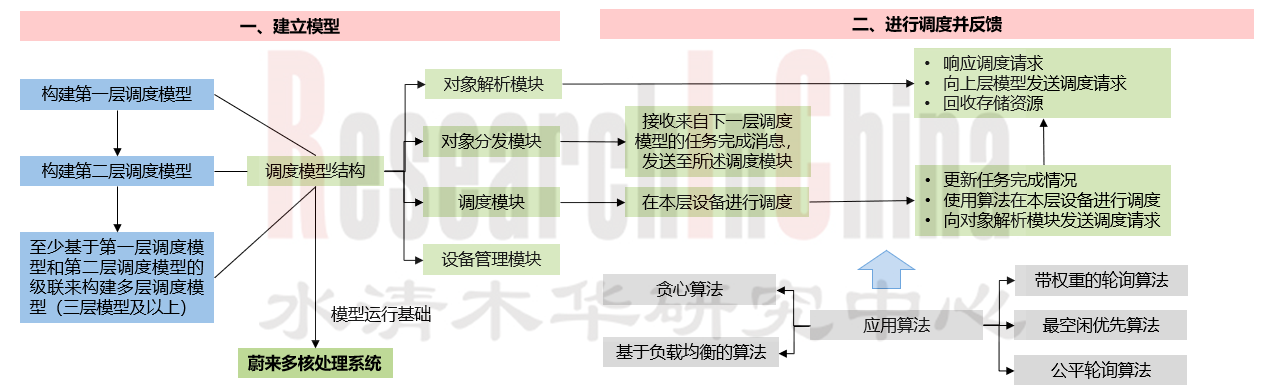
图片来源:蔚来汽车
Linux、鸿蒙、天枢等操作系统对多任务采用了不同的调度方式,并由最初的统一调度演化到了多层调度,提升了处理效率,同时提升了安全性能。
Linux、鸿蒙、天枢的多任务调度方式对比

图片来源:佐思汽研整理
方式三,以大众为例:
大众VW.OS由SDK(软件开发工具包)、参考应用程序、软件组件和用于嵌入式软件和云连接的配置工具组成,通过与VW.AC(大众汽车云)、大循环数据聚合系统(BigLoop)联合工作,形成整车软件开发平台,实现分布式处理向集中式处理方式的转换,达到核心架构减少到三个车载中央处理器。
截至2023年2月,保时捷与奥迪的部分车型已经搭载该软件平台的1.2高级版本的部分组件(包括软件更新、云端数据传输、诊断和数据积累),大众计划将完整的软件平台作为2.0版本在2025年推出,合作伙伴包括黑莓和微软等。
大众VW.OS架构
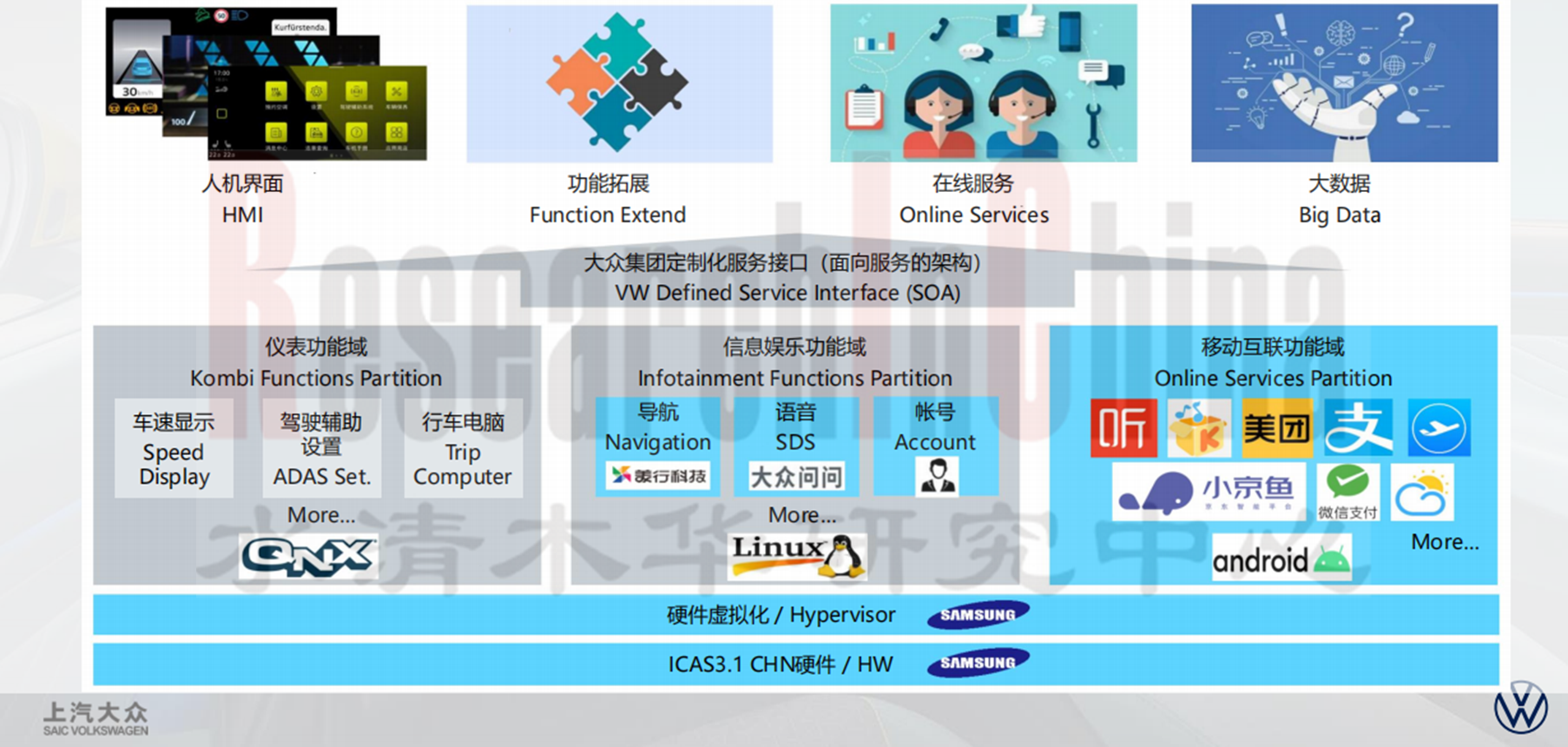
图片来源:大众
供应商:构建操作系统生态圈
操作系统的规模化应用,需要强大生态系统的支持。2023年,汽车OS供应商在积极落地整车操作系统的同时,加大对操作系统生态的拓展,包括适配更多国产化芯片、建立更多的上下游合作伙伴等。
上下游合作:
中科创达:由子公司滴水智行和中国(上海)自由贸易试验区临港新片区密切合作,建立整车研发基地;
与大众旗下Cariad公司合资成立Carthunder公司,在智能网联、智能座舱、操作系统等领域开展合作。
诚迈科技:与EB在Autosar领域建立战略合作关系。
芯片:
中科创达:中科创达与高通芯片深度绑定,如在搭载了高通 8 系列芯片平台的边缘设备上实现了 LLaMA-2 130 亿参数模型的稳定运行,通过 AI 大模型提升整车平台产品的竞争力。
诚迈科技:2023年,诚迈科技基于地平线TogetheROS.Auto平台,构建了面向J5、J6平台的Hesper OS软件平台产品方案,该方案以FusionDrive的功能为基础,增加SOA服务功能;此外,诚迈科技与英伟达签订合作协议,成为其生态系统软件合作伙伴,为智能驾驶相关企业提供基于Orin及Xavier芯片的智能驾驶视觉方案。
构建开发者生态:
如华为,推出HarmonyOS NEXT,并提供面向开发者的中间件和工具链。
中科创达整车操作系统发展历程

图片来源:中科创达
01 汽车操作系统趋势分析
1.1 趋势一:底层OS竞争格局变动
1.1.1 市场现状
1.1.2 底层OS市场最新动态
1.1.3 WinCE正式退出市场
1.1.4 Linux潜在竞争性加强
1.1.5 国产化现状
1.2 趋势二:操作系统迈向开源整合阶段
1.2.1 中国车用操作系统开源计划
1.2.2 开源整合关键
1.3 趋势三:SOA架构下的整车操作系统
1.3.1 整车操作系统定义
1.3.2 软件层架构
1.3.3 整车操作系统特点
1.3.4 整车OS开发模式演变
1.3.5 整车OS商业模式演变
1.3.6 主机厂整车OS布局方式
1.3.7 供应商整车OS布局方式
1.3.8 整车OS跨域调动:算法调用/芯片适配
1.3.9 整车OS与AI大模型的结合
1.4 趋势四:主机厂自研操作系统
1.4.1 主机厂自研操作系统的优势与风险
1.4.2 主机厂自研操作系统的梯度现状
1.4.3 主机厂自研操作系统方案对比
1.5 趋势五:车机系统
1.5.1 映射软件功能弱化
1.5.2 头部供应商市场份额变化情况
02 汽车操作系统综述
2.1 汽车操作系统简介
2.1.1 汽车操作系统的定义
2.1.2 操作系统上车历程
2.2 汽车操作系统分类
2.2.1 车用操作系统分类:狭义OS和广义OS
2.2.2 车用操作系统分类:实时、非实时
2.2.3 实时操作系统供应商和产品列表
2.2.4 非实时操作系统供应商和产品列表
2.2.5 车用操作系统分类:微内核、宏内核、混合内核
2.2.6 车用操作系统分类:车控和车载操作系统
2.2.7 车载操作系统产业图
2.2.8 车用操作系统市场规模预测
2.3 软件架构
2.3.1 智能汽车软件架构
2.3.2 智能汽车软件生态框架
2.3.3 内核是汽车软件架构的核心
2.4 业务模式
2.4.1 汽车操作系统业务模式类型
2.4.2 主要汽车操作系统企业业务模式
2.4.3 汽车操作系统发展趋势及业务模式探索
2.4.4 基础型汽车操作系统及业务模式
2.4.5 汽车RTOS操作系统及业务模式
2.4.6 供应商操作系统及业务模式
2.5 基础型汽车操作系统
2.5.1 基础型汽车操作系统简介
2.5.2 车载底层操作系统市场份额
2.6 定制型操作系统
2.6.1 定制型汽车操作系统简介
2.6.2 定制型汽车操作系统对比
2.6.3 芯片厂商及操作系统定制化合作伙伴
2.7 ROM型操作系统
2.8 Hypervisor
2.8.1 Hypervisor简介
2.8.2 Hypervisor成为必然选择
2.8.3 主要Hypervisor对比
2.9 OSEK
2.9.1 OSEK简介
2.9.2 OSEK架构与特点
2.10 开放组织Covesa
2.10.1 Covesa简介
2.10.2 Covesa成员
2.10.3 Covesa主要成果
2.10.4 Covesa成果示例
2.10.5 Covesa的主要作用
2.10.6 Covesa 发展动向
2.11 开放组织AUTOSAR
2.11.1 AUTOSAR简介
2.11.2 AUTOSAR分类
2.11.3 主要成员
2.11.4 经典AutoSAR
2.11.5 自适应AutoSAR1
2.11.6 经典AutoSAR和自适应AutoSAR的对比
2.11.7 自适应AutoSAR与ROS的融合使用
2.11.8 AutoSAR核心点
2.11.9 AutoSAR中国工作组架构
2.11.10 AutoSAR中国工作组项目案例
2.11.11 AUTOSAR相关软件工具供应商业务模式
2.11.12 Vector AUTOSAR解决方案业务模式
2.11.13 EB AUTOSAR解决方案业务模式
2.11.14 东软睿驰AUTOSAR解决方案业务模式
2.11.15 普华基础软件AUTOSAR解决方案业务模式
2.11.16 经纬恒润AUTOSAR解决方案业务模式
2.12 开放组织Autoware Foudation
2.12.1 Autoware基金会简介
2.12.2 Autoware Core 特点
03 基础操作系统
3.1 QNX
3.1.1 QNX简介
3.1.2 QNX业务
3.1.3 QNX实时操作系统(Neutrino RTOS)
3.1.4 QNX Neutrino RTOS支持平台
3.1.5 QNX车端应用
3.1.6 QNX座舱软件平台解决方案
3.1.7 QNX Platform for ADAS
3.1.8 QNX安全等级
3.1.9 QNX OS for Safety
3.1.10 QNX舱驾一体控制器
3.1.11 QNX合作伙伴
3.1.12 QNX最新动向
3.2 Linux&AGL
3.2.1 AGL简介
3.2.2 AGL架构
3.2.3 Linux架构
3.2.4 AGL迭代历程
3.2.5 AGL合作主机厂
3.2.6 RT-Linux
3.2.7 AGL成员单位
3.2.8 AGL动态
3.3 Android
3.3.1 Android & Andriod Automotive OS简介
3.3.2 Android Automotive OS特点
3.3.3 底层架构
3.3.4 用户发展情况
3.3.5 最新动态
3.4 VxWorks
3.4.1 VxWorks简介
3.4.2 WindRiver产品:VxWorks
3.4.2 WindRiver产品:WindRiver Linux与风河AUTOSAR Adaptive软件平台
3.4.2 WindRiver产品:Helix虚拟化平台
3.4.3 风河软件VxWorks微内核架构
3.4.4 汽车相关领域主要合作伙伴
3.4.5 风河在汽车领域的动向
3.4.6 最新应用:安波福在汽车业中引入Wind River Studio“云原生”
3.5 AliOS
3.5.1 AliOS 简介
3.5.2 AliOS操作系统架构
3.5.3 AliOS应用层解析
3.5.4 AliOS解决方案
3.5.5 AliOS Drive智能驾驶操作系统
3.5.6 斑马智行AliOS Drive合作
3.5.7 AliOS接入大模型
3.5.8 AliOS搭载车型
3.5.9 AliOS最新动态
3.6 鸿蒙OS
3.6.1 鸿蒙OS简介
3.6.2 鸿蒙OS发展历程
3.6.3 鸿蒙OS技术特点
3.6.4 鸿蒙OS与车企合作模式
3.6.5 鸿蒙OS座舱操作系统HOS
3.6.6 智能驾驶操作系统AOS
3.6.7 智能车控操作系统VOS
3.6.8 华为跨域集成软件框架
3.6.9 CCA架构:VCU中央计算+3-5个VIU
3.6.9 CCA架构:系统框架和全栈解决方案
3.6.10 鸿蒙接入大模型
3.6.11 鸿蒙OS搭载车型
3.6.12 最新动态
3.7 Ubuntu
3.7.1 Ubuntu简介
3.7.2 Ubuntu历代版本
3.7.3 Ubuntu应用
3.7.4 Ubuntu汽车领域合作
3.8 ROS
3.8.1 ROS简介
3.8.2 ROS 2.0 简介
3.8.3 ROS 2.0 迭代历程
3.8.4 ROS 2.0 架构
3.8.5 ROS应用案例
3.9 webOS
3.9.1 webOS 发展历程
3.9.2 webOS OSE组件和发展路线图
3.9.3 webOS 可与AGL整合
3.9.4 webOS在汽车领域的动向
04 Hypervisor研究
4.1 Hypervisor简介
4.1.1 Hypervisor定义
4.1.2 主要Hypervisor对比
4.1.3 Hypervisor虚拟机产业发展现状
4.1.4 国内智能座舱虚拟机应用情况
4.1.5 全球汽车Hypervisor市场前景
4.1.6 全球Hypervisor供应商和产品列表
4.1.7 中国Hypervisor供应商和产品列表
4.1.8 汽车虚拟机管理系统业务模式
4.2 QNX Hypervisor
4.2.1 QNX Hypervisor简介
4.2.2 QNX Hypervisor架构
4.2.3 QNX Hypervisor解决方案
4.3 ACRN
4.3.1 ACRN简介
4.3.2 ACRN构成
4.4 COQOS Hypervisor
4.4.1 COQOS Hypervisor
4.4.2 COQOS Hypervisor SDK
4.4.3 Mixed VIRTIO / Non-VIRTIO 架构
4.4.4 “Next Gen COQOS” Heterogeneous Cores
4.5 PikeOS
4.6 EB Corbos Hypervisor
4.7 哈曼Device Virtualization
4.8 VOSYSmonitor
4.9 中瓴智行Hypervisor
05 广义汽车操作系统及企业研究
5.1 东软睿驰NeuSAR
5.1.1 东软智能网联汽车业务布局
5.1.2 NeuSAR简介
5.1.3 NeuSAR发展动向
5.1.4 主要产品
5.1.5 整车操作系统
5.1.6 东软睿驰域控制器软件开发平台NeuSAR DS
5.1.7 NeuSAR安全等级
5.2 中科创达
5.2.1 中科创达简介
5.2.2 业务简介
5.2.3 滴水OS整车操作系统
5.2.4 魔方大模型与操作系统结合
5.2.5 中科创达操作系统项目
5.2.6 SOA中间件
5.3 ETAS
5.3.1 整车解决方案
5.3.2 云原生软件平台
5.4 诚迈科技
5.4.1 公司简介
5.4.2 主要产品
5.4.3 子公司智达诚远
5.4.4 操作系统FusionOS
5.4.5 与地平线合作智驾域操作系统平台
5.4.6 融合矩阵
5.4.7 FusionDrive:Some IP产品及智能网关
5.4.8 Some IP与TogetheROS.Auto融合的架构
5.4.9 基于J5的SomeIP融合架构
5.4.10 基于J5的FusionDrive诊断
5.4.11 合作伙伴
5.5 EB
5.5.1 公司与产品简介
5.5.2 EB基于J5的智驾域操作系统
5.6 国汽智控
5.6.1 国汽智控公司简介
5.6.2 国汽智控推动汽车操作系统标准工作
5.6.3 ICVOS: 智能网联汽车操作系统
5.6.4 ICVOS: 软件架构/开发架构/SDK架构
5.6.5 ICVOS: 车云协同
5.6.6 ICVOS: 信息安全基础平台
5.6.7 ICVOS: 与主机厂共同完成软件架构开发案例
5.7 英伟达DRIVE OS
5.7.1 英伟达:Drive OS简介
5.7.2 英伟达:Drive OS SDK架构
5.8 小度车载OS
5.8.1 简介
5.8.2 功能特点
5.8.3 应用场景及车载客户
5.8.4 软件架构
5.8.5 小度车载OS接入大模型
5.8.6 百度整车OS计划
5.9 Apex.AI
5.9.1 Apex.AI简介
5.9.2 Apex.AI动态
5.9.3 Apex.OS特点
5.9.4 Apex.OS拓展包
5.9.5 Apex.OS工具架构
5.10 普华
5.10.1 普华简介
5.10.2 普华发展历程
5.10.3 普华产品和服务
5.10.4 普华基础软件AUTOSAR CP+AP一体化解决方案
5.10.5 普华基础软件操作系统架构
5.10.6 普华整车操作系统架构
5.10.7 普华Orientais
5.10.8 普华开源微内核
5.11 中瓴智行
5.11.1 公司介绍
5.11.2 中瓴智行“RAITE OS”
5.12 中兴通讯GoldenOS
5.12.1 微内核和宏内核技术架构
5.12.2 车控OS解决方案
5.12.3 智能座舱OS解决方案
5.12.4 智驾OS解决方案
5.12.5 东软睿驰+中兴通讯+芯驰合作动态
5.12.6 新支点操作系统简介
5.12.7 新支点发展历程
5.12.8 新支点智能座舱操作系统解决方案
5.13 亿咖通
5.13.1 产品简介
5.13.2 生态合作
5.14 其他
5.14.1 睿赛德科技
5.14.2 映驰科技EMOS
5.14.3 光庭信息Kcar-OS
5.14.4 擎OS
5.14.5 足下科技
06 主机厂整车操作系统
6.1 Tesla OS
6.1.1 Tesla OS简介
6.1.2 特斯拉:云端的操作系统
6.2 蔚来天枢
6.2.1 天枢SkyOS
6.2.2 天枢SkyOS架构
6.2.3 蔚来整车操作系统调度算法
6.2.4 适配芯片
6.3 小米Hyper OS
6.3.1 HyperOS简介
6.3.2 小米操作系统发展历程
6.3.3 小米Hyper OS架构设计
6.3.4 小米Hyper OS车机功能
6.3.5 小米Hyper OS接入大模型
6.3.6 小米Hyper OS采用Nuttx内核
6.4 理想汽车
6.4.1 Li OS架构
6.4.2 芯片自研情况
6.5 小鹏XsmartOS
6.5.1 小鹏X-EEA2.0架构
6.5.2 小鹏X-EEA3.0 关键技术
6.5.3 下一步规划
6.6 零跑汽车
6.6.1 零跑四域融合架构
6.6.2 零跑智驾操作系统
07 其他主机厂操作系统
7.1 大众VW.OS
7.1.1 大众VW.OS简介
7.1.2 大众VW.OS发展历程
7.1.3 大众VW.OS特点
7.1.4 软件总体布局
7.1.5 大众VW.OS 路线图——硬件、软件将同步
7.1.6 大众E³ 2.0 EEA:CARIAD软件平台
7.2 丰田 Arene OS
7.2.1 丰田 Arene OS简介
7.2.2 丰田Arene OS生态资源
7.2.3 丰田Arene Os功能
7.3 宝马
7.3.1 宝马量产EEA:软件系统发展演变
7.3.2 宝马iDrive
7.4 奔驰MB OS
7.4.1 奔驰 MB OS功能简介
7.4.2 奔驰 MB OS架构
7.4.3 奔驰 MB OS开发近况
7.5 一汽FAW.OS
7.5.1 FAW.OS架构
7.5.2 FAW.OS特点
7.6 上汽零束智能车云管端全栈解决方案—SOA软件平台
7.7 广汽普赛OS
7.7.1 普赛OS架构
7.7.2 普赛OS应用
7.8 吉利汽车
7.8.1 VolvoCars.OS
7.8.2 Flyme OS
7.8.3 基于SOA的操作系统- GeelyOS
7.8.4 ZEEKR OS
7.9 长城
7.9.1 长城汽车GEEP 4.0准中央EEA:SOA软件框架
7.9.2 Coffee OS
7.9.3 长城汽车GEEP 5.0中央计算EEA
7.10 长安RTDriveOS
7.10.1 RTDriveOS架构
7.10.2 RTDriveOS下一步规划
7.11 奇瑞CHERY-OS
7.11.1 CHERY-OS架构
7.11.2 CHERY-OS应用
7.12 东风
7.12.1 东风整车操作系统架构
7.12.2 东风整车操作系统发展路径
7.13 比亚迪BYD OS