摘要
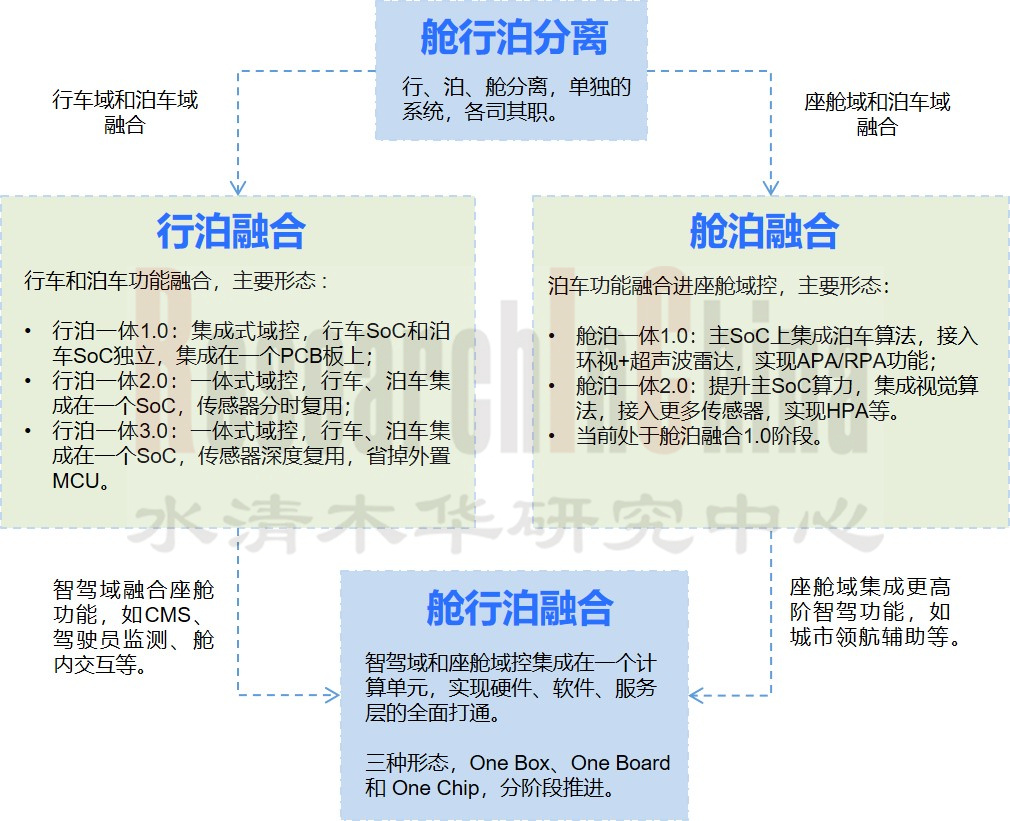
当前,E/E架构正从分布式向域集中式、跨域融合方向发展,域控制器内外部的融合趋势日渐明显,尤其是智驾域和座舱域两大核心域控制的融合。在此背景下,演变出行泊一体、舱泊一体,以及舱驾一体三种主要的融合形态。
基于此,推出《2024年智能汽车舱驾融合(舱行泊)产业研究报告》,旨在全面梳理舱行泊融合脉络,从整体上把握产业发展方向。
行泊一体:2023年迎来大规模落地,如今已有30多家厂商近70款车型搭载行泊一体方案。根据佐思汽研统计,2023年1-11月我国行泊一体装配量已超过140万辆,同比增长38.0%。预计2025年,行泊一体装配量将超过300万辆。
舱泊一体:进入商业化探索阶段,大算力芯片已率先落地,如高通8155/8295、芯擎“龍鹰一号”、芯驰X9SP等。基于此,博世、安波福、伟世通、德赛西威、亿咖通、远峰科技、北斗智联等陆续推出舱泊一体方案,部分已获得主机厂定点或量产,如领克08。2024-2025年,舱泊一体将进入批量上车阶段。
舱驾一体:已基本具备硬件基础,如英伟达的Drive Thor、Snapdragon Ride Flex平台等,其算力均达到2000TOPS,可单芯片实现智能驾驶和舱内算法融合,同时可支持多计算域间隔离。2023年下半年开始提速,有望2025年量产落地。
来源:《2024年智能汽车舱驾融合(舱行泊)产业研究报告》
01 行泊一体强攻“性价比”,市场进一步细化
行泊一体是将原本独立的行车、泊车控制器集成在一个域控里,在降本的同时,支持更丰富、高阶的智驾功能。
近两年,行泊一体迎来大爆发,主机厂、Tier1、智驾公司、算法公司、软件公司、芯片公司等纷纷布局。其主要原因有两点:一是成本驱动,通过将负责行车、泊车功能的 ECU,集成在同一个域控制器上,可大幅降低硬件成本;二是智能化需求提升,行泊一体可以实现计算资源共享、传感器深度复用,并能通过统一的 OTA 升级,提升用户的智驾体验。
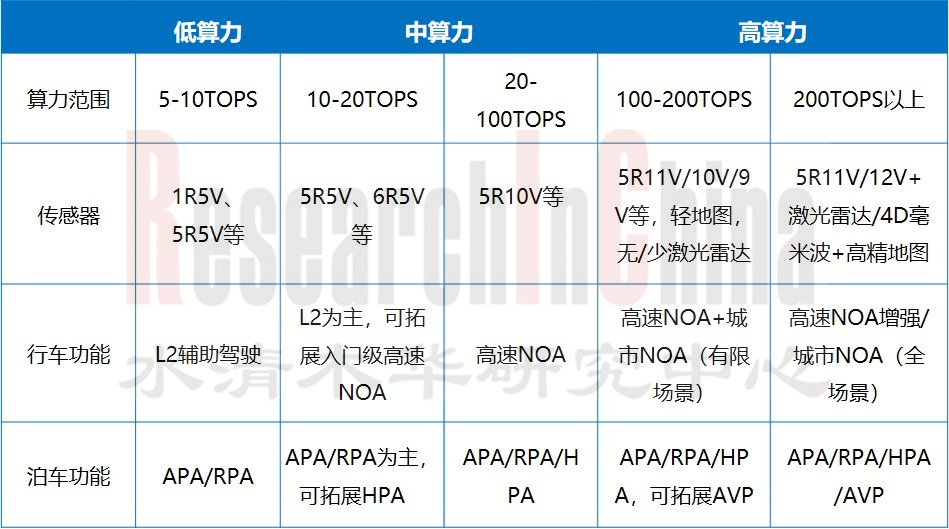
按照算力不同,行泊一体大致分为低(5-10TOPS)、中(10-100TOPS)、高(100TOPS以上)三类。2023年主机厂降本需求激增,行泊一体Tier1 纷纷打出“极致性价比”这张牌,推动市场分层。
主要表现有两种:一种是通过压榨芯片算力,猛攻算法等途径,向低算力(5-10TOPS)拓展。另一种是原来主要面向200TOPS以上高端市场的厂商,不再“堆料”,强化算法和软件技术,使高阶行泊一体实现性能和成本的平衡。
行泊一体分类(按算力)
来源:《2024年智能汽车舱驾融合(舱行泊)产业研究报告》
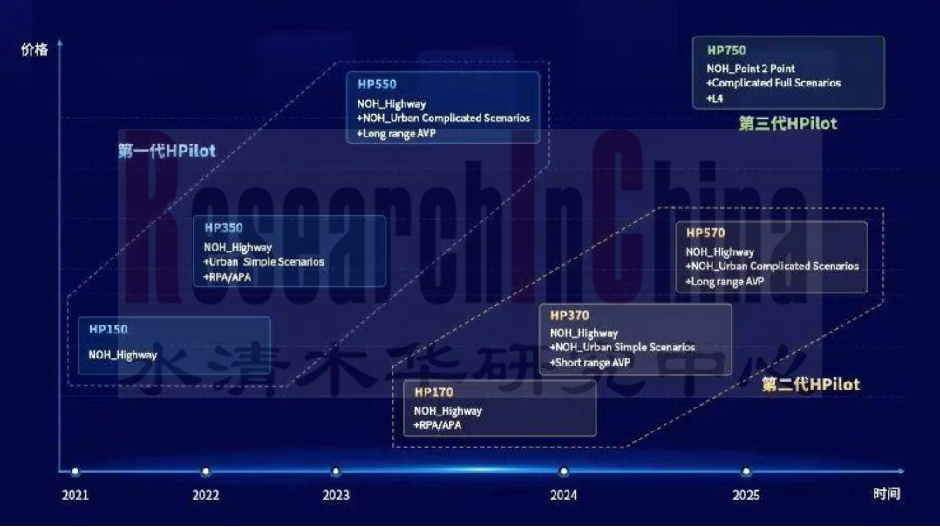
毫末智行2023年10月发布第二代 HPilot 系统,含HP170、HP370、HP570三款行泊一体方案,覆盖高中低多个场景,计划2024年陆续量产落地。
▪HP170:3000元级方案,可满足低算力行泊一体的市场需求。采用无图方案,芯片算力5TOPS ,行泊一体分时复用,支持5V2-5R传感器接入,可实现无图高速NOA。
▪HP370:5000元级方案,中算力平台方案。基于TDA4 VH(30TOPS)搭载,支持9V3-5R(可选装增加2个前角雷达),实现高速NOH、城市记忆行车、记忆泊车等
▪HP570:8000元级方案,可满足全场景城市无图NOH需求。算力可选 72TOPS 和 100TOPS 两款芯片;标配11V1R12U,可选配1颗激光雷达,可实现城市无图 NOH、全场景辅助泊车、全场景智能绕障、跨楼层免教学记忆泊车等功能。
董事长张凯表示:“毫末全新发布的第二代 HPilot 乘用车辅助驾驶三款产品,价格打下来的同时性能都打了上去,让中阶智驾便宜更好用,让高阶智驾好用更便宜。” 例如HP570,与第一代HP550(基于高通骁龙Ride芯片,算力360TOPS,可接入激光雷达等,实现城市NOA)相比,在性能不打折扣的情况下,成本可下降三分之二。
来源:毫末智行
此外,宏景智驾、知行科技、福瑞泰克、四维图新等Tier 1 都在不遗余力地推动“极致性价比”产品的落地。其中,多数选择在低算力、中低端市场部署,以抓住规模化落地的红利。
2023年2月,福瑞泰克推出的单SOC低算力行泊一体方案(基于TDA4M,8TOPS,5V5R配置)将成本控制在3000元以内,包括传感器、域控、算法等。
2023年底,宏景智驾基于单颗地平线J3的行泊一体方案(分时复用)已进入量产状态,算力为5TOPS,搭载自研泊车感知、规控算法,可接入5R5V12U(支持8MP前视),实现自动变道、大车避让等功能。该方案总成本在3000元级别。
多家供应商部署单SOC “高性价比”行泊一体(部分)

来源:《2024年智能汽车舱驾融合(舱行泊)产业研究报告》
02 “降本增效”需求迫切,芯片厂商快速响应
为满足主机厂“降本增效”需求,行泊一体芯片厂商也开始调整产品线,开发出系列新产品。代表企业有英伟达、地平线、黑芝麻智能、TI等。
英伟达:为了满足主机厂“降本”需求,英伟达开发了新一代芯片Orin-N,2023年9月在腾势N7上首发上市。
Orin-N 是Orin X的低阶版本,在CPU 和 GPU 数量上有所缩减,算力达到84TOPS,支持高速NOA、AVP代客泊车等功能。
尽管在算力上Orin N略低于Orin X,但在开发工具、数据链等方面,与Orin-X相同。车企在开发中,可以移植算法,实现Orin-N与Orin X,以及其他Orin 版本的兼容。
Orin-N的量产上车,顺应了车企降本增效的大趋势,预计未来将有更多车型应用。当前,德赛西威正在IPU02 上开发基于Orin-N 的行泊一体产品。
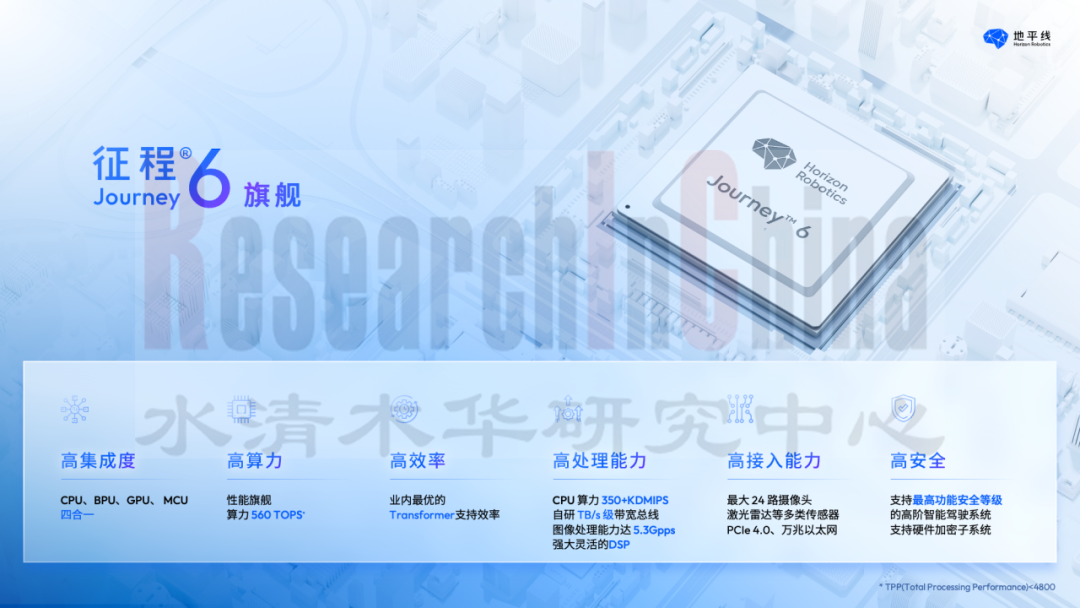
地平线:相继推出J3、J5、J6等系列芯片。其中,J6将于2024年4月发布,支持城市NOA等全场景智驾。J6并不是一款芯片,而是一个系列,覆盖低、中、高全阶智能驾驶需求。
J6 旗舰版于2023年11月率先亮相,最高算力可达560TOPS,实现了CPU、BPU、GPU、CU“四芯合一”,既可降低部署难度,也可提高系统性价比,支持感知、预测、规划、控制、座舱感知等全栈计算任务;支持24路摄像头,最高分辨率可达18MP,以及激光雷达、4D毫米波雷达等多类传感器接入。
J6首批合作伙伴包括比亚迪、广汽、博世、理想、大众Cariad等。
来源:地平线
黑芝麻智能:已推出“华山”和“武当”两个系列芯片,前者面向智驾,后者面向跨域计算。
▪华山系列含A1000L、A1000、A1000 Pro 三款产品,基于两大自研IP——车规级图像处理器NeuralIQ ISP以及车规级低功耗神经网络加速引擎DynamAI NN 打造,均已实现量产,可满足L2-L3智能驾驶需求。
▪武当系列C1200,于2023年4月推出,基于7nm工艺打造,采用最新的 ARM A78AE+G78AE 车规级 CPU+GPU 架构,单颗芯片满足CMS系统、行泊一体、整车计算、信息娱乐系统、智能大灯、舱内感知系统等跨域计算场景。
2023年4月,黑芝麻智能表示已在A1000系列上,推出支持10V(摄像头)NOA功能的高性价比行泊一体智驾域控方案,BOM成本可控制在3000元以内。

来源:黑芝麻智能
03 多家企业布局舱泊一体,亿咖通抢先落地
2023年,行泊一体走热的同时,舱泊一体也悄然兴起。
舱泊一体是在满足座舱功能的同时,将泊车功能融合进来,利用座舱GPU资源,为AVM和APA提供渲染能力,以达到降本增效的需求。当前,博世、安波福、伟世通、亿咖通、德赛西威、远峰科技、北斗智联等陆续推出舱泊一体方案。
舱泊一体产品及方案(部分)

来源:《2024年智能汽车舱驾融合(舱行泊)产业研究报告》
亿咖通是吉利战略投资公司,2023年9月率先在领克08上落地安托拉1000 Pro计算平台。该平台是亿咖通首款舱泊一体融合计算平台,于2023年3月推出,集成两颗“龍鹰一号”,NPU算力达16TOPS,支撑座舱娱乐交互的同时,能提供L2级辅助驾驶和辅助泊车APA、远程泊车RPA功能等。
亿咖通舱泊一体融合计算平台:安托拉1000Pro

来源:亿咖通
安托拉1000 Pro 对标高通8155,CPU 200K DMIPS,GPU 1800G FLOPS,NPU 达16TOPS (INT8),SE-LINK 由芯擎科技定制。
亿咖通智能座舱主要算力模组/计算平台性能对比
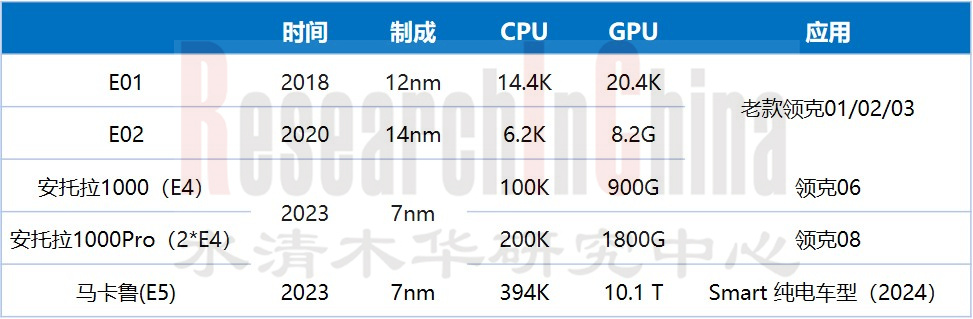
来源:《2024年智能汽车舱驾融合(舱行泊)产业研究报告》
芯擎科技是亿咖通和ARM中国的合资公司,于2018年成立。安托拉1000 Pro 采用的“龍鹰一号”,由芯擎科技自主开发,是国内首款7nm车规级芯片,于2023年3月发布。其内置8个CPU核心、14个GPU核心、8TOPS INT8 可编程NPU,以及ASIL-D安全岛、高性能加解密引擎等,支持7 屏 4K/2K 不同独立屏,以及12路 2/3MP摄像头的接入。
基于单颗“龍鹰一号”,芯擎科技还开发了舱泊一体解决方案,可支持4路 4K/2K全功能智能座舱,无需新增ECU和感知系统支持自动泊车扩展,如RPA/HPA等。与传统方案相比,该方案可节省700-1200人民币。
单龍鹰一号舱泊一体解决方案
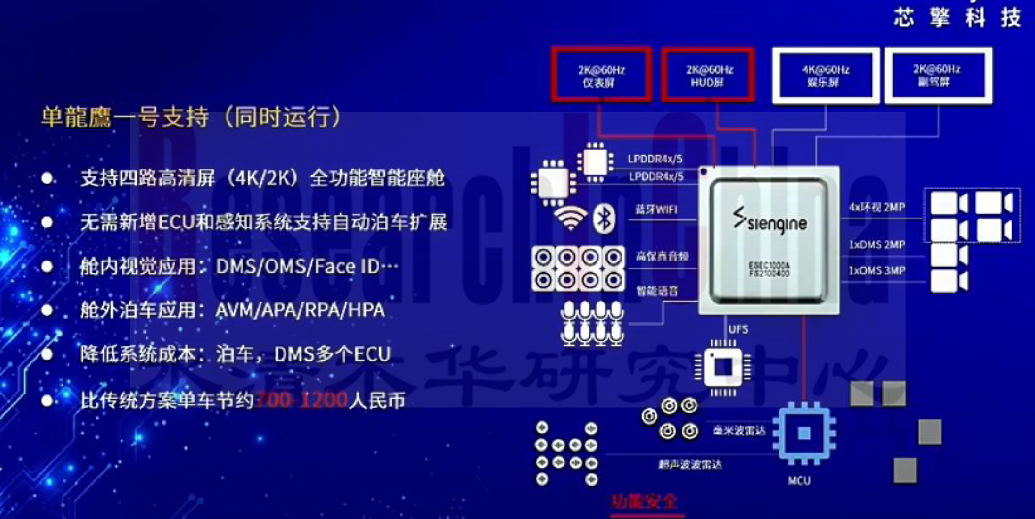
来源:芯擎科技
04 舱驾融合驶入快车道,2025年有望量产
舱驾一体是将整个智驾域和座舱域集成到一个高性能计算单元中,同时支持智能驾驶和智能座舱功能,被认为是未来发展的方向。
当前,英伟达、高通、黑芝麻智能等已经推出大算力芯片,支持智驾和智舱的跨域计算。
英伟达:Drive Thor芯片最高算力2000TOPS,单芯片实现智能驾驶和舱内算法融合,同时可支持多计算域间隔离,计划2025年在极氪车型上量产。2024CES上,理想也表示将使用DRIVE Thor。
高通:Snapdragon Ride Flex平台(8795芯片)最高算力2000TOPS,单芯片支持座舱和自动驾驶多域融合计算。当前畅行智驾、镁佳科技、车联天下等正基于该平台开发舱驾一体产品及方案。
2023年下半年以来,舱驾融合开发、落地速度加快,百度、畅行智驾、车联天下、博世、安波福等陆续推出单SoC舱驾融合产品或方案。这将助力舱驾融合的快速落地,预计2025年后将规模应用。
2023年10月,百度推出Apollo Robo-Cabin舱驾一体软芯融合智算平台,基于一块高通座舱芯片(兼容高通8295、8255、8775)同时实现包括AEB、LCC等基础智驾功能和座舱能力。该方案初级版本已率先在吉利银河E8、极越01等车型落地。此外,百度还与航盛电子合作,将打造新一代舱驾融合产品,计划2024年Q3推出。
2023年11月,畅行智驾推出单SoC 舱驾融合解决方案RazorDCX Tarkine ,基于高通 Snapdragon Ride Flex 打造,支持贯穿式8K分辨率长屏,搭载全场景、沉浸式、全3D界面,可实现360环视、驾驶员监测、游戏影音娱乐、互联等座舱功能;还支持自动泊车、L2++高速及城区智能驾驶功能。
2024年1月,车联天下基于高通 Snapdragon Ride Flex 推出最新舱驾融合域控制器,单SoC可实现高速NOA、记忆泊车等L2+级智能驾驶功能,以及集成摄像头监测系统(CMS)等。该产品将落地在哪吒汽车下一代车型上。
2024年1月,安波福推出首个基于单SoC的舱行泊融合系统——跨域融合计算平台。基于国产芯片和风河软件打造,覆盖智能座舱、智能辅助驾驶和自动泊车三大域,可同时支持多屏交互、在线视频、导航和语音助理、行车车道线和交通灯识别、泊车位置和障碍感知等多项功能。
2024年1月,博世推出新型座舱&智驾跨域集成平台,其核心是单个SoC,可同时处理信息娱乐和驾驶员辅助系统两个领域内的各种功能,包括自动泊车、车道检测、智能个性化导航和语音辅助等。
博世新型座舱&智驾跨域集成平台,单一SoC实现多域控
01 EE架构与舱行泊融合
1.1 汽车E/E架构演进路线
1.1.1 未来十年的汽车E/E架构演变趋势
1.1.2 建立下一代E/E架构的关键技术
1.1.3 主机厂新一代E/E架构及域集成方式(1)
1.1.4 主机厂新一代E/E架构及域集成方式(2)
1.2 E/E架构与舱行泊融合
1.2.1 E/E架构演进推动域控制器融合
1.2.2 行泊一体/舱泊一体/舱驾一体对比
1.2.3 泊车功能在域集成/融合中迭代历程
1.2.4 智驾功能在域集成/融合中迭代历程
1.2.5 座舱功能在域集成/融合中迭代历程
1.2.6 行泊/舱泊/舱驾融合落地时间预判
1.3 主机厂舱驾融合布局及最新动态
1.3.1 吉利汽车
1.3.2 长安汽车
1.3.3 哪吒汽车
1.3.4 零跑汽车
1.3.5 极越汽车
1.3.6 智己汽车
02 行泊一体集成方式及趋势研究
2.1 行泊一体简介
2.1.1 行泊一体及优势
2.1.2 行泊一体的四种形态
2.1.3 行泊一体主要玩家
2.1.4 行泊一体主要芯片及应用
2.1.5 行泊一体软件算法演进
2.2 行泊一体方案分析
2.2.1 单芯片与多芯片行泊一体方案对比
2.2.2 单SOC行泊一体方案的两种技术路径
2.2.3 轻量级与高阶行泊一体方案对比
2.2.4 轻量级行泊一体方案一览表(1)-(3)
2.2.5 高阶行泊一体方案一览表(1)-(4)
2.3 行泊一体上车情况
2.3.1 国内行泊一体装配量及装配率
2.3.2 自主/合资车企行泊一体装配量及装配率
2.3.3 行泊一体装配量TOP10 品牌/车型
2.3.4 不同算力行泊一体装配量及占比
2.3.5 不同价位行泊一体装配量及占比
2.3.6 行泊一体供应商TOP10
2.4 行泊一体发展趋势探讨
2.4.1 单SOC 行泊一体是必然趋势?(1)
2.4.2 单SOC 行泊一体是必然趋势?(2)
2.4.3 单SOC 行泊一体是必然趋势?(3)
2.4.4 高阶行泊一体发展方向?(1)
2.4.5 高阶行泊一体发展方向?(2)
2.4.6 行泊一体对芯片有哪些要求?
2.4.7 行泊一体产业链合作模式如何变化?
2.4.8 行泊一体产业链合作模式一
2.4.9 行泊一体产业链合作模式二
2.4.10 行泊一体产业链合作模式三
2.4.11 芯片厂商如何助力主机厂落地行泊一体方案?(1)
2.4.12 芯片厂商如何助力主机厂落地行泊一体方案?(2)
2.4.13 如何从行泊一体向舱驾融合过渡?
03 舱泊一体集成方式及趋势研究
3.1 舱泊一体简介
3.1.1 舱泊一体及优劣
3.1.2 舱泊一体推动因素(1)
3.1.3 舱泊一体推动因素(2)
3.1.4 舱泊一体推动因素(3)
3.1.5 舱泊一体推动因素(4)
3.1.6 舱泊一体 VS 行泊一体
3.1.7 舱泊一体集成方式
3.2 舱泊一体趋势探索
3.2.1 舱泊一体应用在哪些车型?
3.2.2 哪些企业布局舱泊一体?(1)
3.2.3 哪些企业布局舱泊一体?(2)
3.2.4 舱泊一体对芯片的要求?
3.2.5 舱泊一体芯片厂商有哪些?
3.2.6 高通在舱泊一体/舱驾一体中的优势突出(1)
3.2.7 高通在舱泊一体/舱驾一体中的优势突出(2)
3.2.8 舱泊一体面临的挑战
04 舱驾一体集成方式及趋势研究
4.1 舱驾一体简介
4.1.1 舱驾融合及优劣
4.1.2 舱驾融合的需求和优势
4.1.3 舱驾融合技术体系架构
4.2 舱驾融合主要方式
4.2.1 舱驾融合三种实现方式
4.2.2 多芯片软硬件舱驾融合方案
4.2.3 单芯片软硬件舱驾融合方式
4.2.4 舱驾融合对芯片的需求
4.2.5 舱驾融合主要芯片及进展
4.3 舱驾融合趋势探索
4.3.1 舱驾融合是必然趋势吗?
4.3.2 舱驾融合如何推进?
4.3.3 舱驾融合形态走向?
4.3.4 哪些企业布局舱驾融合?(1)
4.3.5 哪些企业布局舱驾融合?(2)
4.3.6 舱驾融合企业格局探索
4.3.7 主机厂舱驾融合诉求及购买需求?
4.3.8 舱驾融合面临的挑战
4.3.9 挑战1
4.3.10 挑战2
4.3.11 挑战3
4.3.12 挑战4
05 主要供应商产品及方案研究
5.1 博世
5.1.1 博世XC简介
5.1.2 博世舱驾融合发展路径
5.1.3 博世舱泊融合方案
5.1.4 博世舱泊融合方案(1)
5.1.5 博世舱驾融合方案(2)
5.1.6 博世新型智驾与座舱跨域集成平台
5.2 大陆
5.2.1 公司简介
5.2.2 大陆跨域融合业务布局(1)
5.2.3 大陆跨域融合业务布局(2)
5.2.4 大陆芯智驾行泊一体方案
5.2.5 大陆Elektrobit HPC 软件
5.3 安波福
5.3.1 企业简介
5.3.2 安波福SVA硬件平台
5.3.3 安波福Wind River软件平台
5.3.4 安波福新一代智能座舱平台及迭代趋势(1)
5.3.5 安波福新一代智能座舱平台及迭代趋势(2)
5.3.6 安波福行泊一体解决方案
5.3.7 安波福舱行泊系统
5.3.8 安波福合作动态
5.4 采埃孚
5.4.1 公司简介
5.4.2 采埃孚计算平台
5.4.3 采埃孚“采睿星”计算平台(1)
5.4.4 采埃孚“采睿星”计算平台(2)
5.5 伟世通
5.5.1 伟世通简介
5.5.2 伟世通座舱域控制器
5.5.3 伟世通舱泊一体产品及方案(1)
5.5.4 伟世通舱泊一体产品及方案(2)
5.6 德赛西威
5.6.1 公司简介
5.6.2 德赛西威舱行泊业务布局
5.6.3 德赛西威行泊一体产品及方案(1)
5.6.4 德赛西威行泊一体产品及方案(2)
5.6.5 德赛西威行泊一体产品及方案(3)
5.6.6 德赛西威舱泊一体产品及方案(1)
5.6.7 德赛西威舱泊一体产品及方案(2)
5.6.8 德赛西威舱泊一体产品及方案(3)
5.6.9 德赛西威舱泊一体产品及方案(4)
5.6.10 德赛西威舱驾融合产品及方案(1)
5.6.11 德赛西威舱驾融合产品及方案(2)
5.7 畅行智驾
5.7.1 畅行智驾简介
5.7.2 畅行智驾发展历程
5.7.3 畅行智驾域控制器规划
5.7.4 畅行智驾行泊一体解决方案
5.7.5 畅行智驾舱驾融合解决方案
5.7.6 畅行智驾中间件产品方案
5.7.7 畅行智驾合作模式及合作动态
5.8 百度Apollo
5.8.1 百度Apollo简介
5.8.2 百度Apollo智能化产品矩阵
5.8.3 百度行泊一体迭代历程
5.8.4 百度行泊一体方案(1)
5.8.5 百度行泊一体方案(2)
5.8.6 百度Apollo Robo-Cabin舱驾一体软芯融合智算平台
5.8.7 百度舱驾一体解决方案
5.8.8 百度合作模式及合作动态
5.9 亿咖通
5.9.1 亿咖通简介
5.9.2 亿咖通子公司——吉咖智能
5.9.3 亿咖通发展历程及规划
5.9.4 亿咖通计算平台产品
5.9.5 亿咖通行泊一体产品
5.9.6 亿咖通舱泊一体产品
5.9.7 亿咖通舱驾融合产品
5.9.8 亿咖通“云山”跨域能力底座
5.9.9 亿咖通合作动态
5.10 零束科技
5.10.1 零束E/E架构迭代
5.10.2 零束全栈3.0解决方案
5.10.3 零束智驾计算平台ZPD
5.10.4 零束舱驾融合计算平台ZXD(1)
5.10.5 零束舱驾融合计算平台ZXD(2)
5.10.6 零束第一代中央大脑ZXD1
5.10.7 零束舱驾融合数字化体验产品
5.11 纵目科技
5.11.1 公司简介
5.11.2 舱驾融合产品及方案布局
5.11.3 纵目科技行泊一体产品及方案
5.11.4 纵目科技行泊一体产品及方案(1)
5.11.5 纵目科技行泊一体产品及方案(2)
5.11.6 纵目科技行泊一体产品及方案(3)
5.11.7 纵目科技行泊一体产品及方案(4)
5.11.8 纵目科技行泊一体产品及方案(5)
5.11.9 纵目科技舱驾一体产品及方案
5.11.10 合作伙伴及合作动态
5.12 禾多科技
5.12.1 公司简介
5.12.2 禾多科技行舱泊产品迭代历程
5.12.3 禾多科技行泊一体产品及方案
5.12.4 禾多科技行泊一体方案应用车型
5.12.5 禾多科技软硬一体域控制器产品及方案
5.12.6 禾多科技舱驾一体产品及方案(1)
5.12.7 禾多科技舱驾一体产品及方案(2)
5.12.8 禾多科技合作伙伴及动态
5.13 博泰车联网
5.13.1 公司简介
5.13.2 博泰智能座舱迭代历程
5.13.3 博泰中央计算平台(1)
5.13.4 博泰中央计算平台(2)
5.13.5 博泰舱驾一体解决方案
5.14 映驰科技
5.14.1 公司简介
5.14.2 映驰科技主要产品
5.14.3 映驰科技行泊一体解决方案DCU3.0
5.14.4 映驰科技行泊一体解决方案XCG Cen1
5.14.5 映驰科技舱泊一体解决方案(1)
5.14.6 映驰科技舱泊一体解决方案(2)
5.14.7 映驰科技舱泊一体解决方案(3)
5.14.8 映驰科技舱泊一体解决方案(4)
5.14.9 映驰科技舱泊一体解决方案(5)
5.14.10 映驰科技行泊舱一体方案
5.14.11 映驰科技发展动态
5.15 远峰科技
5.15.1 公司简介
5.15.2 远峰科技舱行泊一体产品路线
5.15.3 远峰科技舱泊一体1.0
5.15.4 远峰科技舱泊一体2.0
5.15.5 远峰科技舱驾一体及应用场景
5.15.6 远峰科技舱驾一体合作模式
5.15.7 舱驾一体解决方案合作客户
5.15.8 主要客户及合作伙伴
5.16 华阳集团
5.16.1 公司简介
5.16.2 华阳智能化布局
5.16.3 华阳行泊一体域控制器
5.16.4 华阳舱泊一体域控制器
5.17 北斗智联
5.17.1 公司简介
5.17.2 行舱泊业务布局
5.17.3 基于地平线的舱泊一体产品
5.17.4 基于高通的舱泊一体产品
5.18 四维图新
5.18.1 四维图新简介
5.18.2 四维图新智能驾驶产品布局
5.18.3 四维图新行泊一体方案 (1)
5.18.4 四维图新行泊一体方案 (2)
5.18.5 四维图新行泊一体方案 (3)
5.18.6 四维图新舱驾融合布局
5.18.7 四维图新芯片布局
5.19 经纬恒润
5.19.1 经纬恒润简介
5.19.2 经纬恒润智能驾驶布局
5.19.3 经纬恒润行泊一体产品及方案 (1)
5.19.4 经纬恒润行泊一体产品及方案 (2)
5.19.5 经纬恒润合作动态
5.20 福瑞泰克
5.20.1 公司简介
5.20.2 福瑞泰克核心智驾能力(1)
5.20.3 福瑞泰克核心智驾能力(2)
5.20.4 福瑞泰克智驾解决方案路线图
5.20.5 福瑞泰克行泊一体域控制器产品
5.20.6 福瑞泰克L2 行泊一体方案
5.20.7 福瑞泰克L2+ 行泊一体方案
5.20.8 福瑞泰克L2.5 行泊一体方案
5.20.9 福瑞泰克L2.9 行泊一体方案
5.20.10 福瑞泰克L3/L3+ 行泊一体方案
5.20.11 福瑞泰克智能驾驶合作伙伴
5.21 毫末智行
5.21.1 公司简介
5.21.2 毫末智行HPilot系统迭代图
5.21.3 毫末智行第一代HPilot系统 (1)
5.21.4 毫末智行第一代HPilot系统 (2)
5.21.5 毫末智行行泊一体方案HP350
5.21.6 毫末智行行泊一体方案HP550(1)
5.21.7 毫末智行行泊一体方案HP550(2)
5.21.8 毫末智行第二代HPilot系统(1)
5.21.9 毫末智行第二代HPilot系统(2)
5.21.10 毫末智行智能驾驶落地车型
5.21.11 毫末智行客户及合作伙伴
5.22 易航智能
5.22.1 公司简介
5.22.2 易航智能业务模式
5.22.3 自动驾驶解决方案
5.22.4 行泊一体Lite版(单SoC)(1)
5.22.5 行泊一体Lite版(单SoC)(2)
5.22.6 行泊一体旗舰版(双SoC)(1)
5.22.7 行泊一体旗舰版(双SoC)(2)
5.22.8 行泊一体旗舰版(双SoC)(3)
5.22.9 全场景自动驾驶FSD解决方案
5.22.10 全场景自动驾驶解决方案
5.22.11 合作伙伴及动态
5.23 宏景智驾
5.23.1 宏景智驾简介
5.23.2 宏景智驾业务布局
5.23.3 宏景智驾商业模式
5.23.4 自动驾驶核心技术
5.23.5 宏景智驾产品及方案
5.23.6 宏景智驾单芯片行泊一体方案(1)
5.23.7 宏景智驾单芯片行泊一体方案(2)
5.23.8 宏景智驾高阶行泊一体方案
5.23.9 宏景智驾舱泊一体布局
5.23.10 主要合作伙伴
5.24 大疆车载
5.24.1 大疆车载(卓驭科技)简介
5.24.2 大疆车载研发与生产
5.24.3 大疆车载智驾业务发展策略(1)
5.24.4 大疆车载智驾业务发展策略(2)
5.24.5 大疆车载全场景智能驾驶解决方案
5.24.6 大疆车载灵犀智驾技术路线
5.24.7 大疆车载灵犀智驾系统2.0(1)
5.24.8 大疆车载灵犀智驾系统2.0(2)
5.24.9 大疆车载灵犀智驾系统2.0(3)
5.24.10 大疆车载灵犀智驾系统2.0(4)
5.24.11 大疆车载灵犀智驾系统2.0(5)
5.24.12 大疆车载灵犀智驾系统2.0(6)
5.24.13 大疆车载灵犀智驾系统2.0(7)
5.24.14 大疆车载行泊一体方案应用案例(1)
5.24.15 大疆车载行泊一体方案应用案例(2)
5.24.16 大疆车载合作伙伴及动态
5.25 华为
5.25.1 华为车BU业务布局(1)
5.25.2 华为车BU业务布局(2)
5.25.3 华为车BU业务布局(3)
5.25.4 华为智能汽车全栈解决方案
5.25.5 华为CCA架构
5.25.6 华为CCA架构+VehicleStack(1)
5.25.7 华为CCA架构+VehicleStack(2)
5.25.8 华为MDC系列计算平台
5.25.9 华为MDC 610
5.25.10 华为MDC 810
5.25.11 华为ADS系统解决方案
5.25.12 华为ADS 2.0系统特点及功能(1)
5.25.13 华为ADS 2.0系统特点及功能(2)
5.25.14 华为ADS 2.0系统特点及功能(3)
5.25.15 华为ADS 2.0系统特点及功能(4)
5.25.16 华为合作动态
5.26 知行科技
5.26.1 知行科技简介
5.26.2 知行科技发展历程
5.26.3 知行科技收入及构成(1)
5.26.4 知行科技收入及构成(2)
5.26.5 知行科技产品路线图
5.26.6 知行科技智驾产品解决方案
5.26.7 知行科技行泊一体域控制器(1)
5.26.8 知行科技行泊一体域控制器(2)
5.26.9 行泊一体域控制器iDC系列解决方案(1)
5.26.10 行泊一体域控制器iDC系列解决方案(2)
5.26.11 行泊一体域控制器iDC系列解决方案(3)
5.26.12 行泊一体域控制器SuperVision 解决方案
5.26.13 知行科技行泊一体核心技术
5.26.14 知行科技主要量产项目
5.27 东软睿驰
5.27.1 公司简介
5.27.2 东软睿驰基于SOA架构系列产品
5.27.3 东软睿驰行泊一体域控制器
5.27.4 东软睿驰行泊一体域控制器X-Box 4.0
5.27.5 东软睿驰X-Center 2.0 中央计算单元
5.27.6 东软睿驰FBB架构
5.27.7 东软睿驰openVOC 开放技术框架(1)
5.27.8 东软睿驰openVOC 开放技术框架(2)
5.27.9 东软睿驰openVOC 开放技术框架(3)
5.27.10 东软睿驰openVOC 开放技术框架(4)
5.27.11 东软睿驰openVOC 开放技术框架(5)
5.27.12 东软睿驰发展动态
5.28 智驾科技
5.28.1 公司简介
5.28.2 智驾科技MAXIPILOT 2.0方案
5.28.3 行泊一体MAXIPILOT 2.0 Pro 方案
5.28.4 智驾科技BEV平台架构(1)
5.28.5 智驾科技BEV平台架构(2)
5.28.6 智驾科技海市MAXI-DI数据智能架构
5.28.7 主要量产项目
5.29 商汤科技
5.29.1 公司简介
5.29.2 商汤绝影行泊一体解决方案
5.29.3 商汤绝影行泊一体低配方案
5.29.4 商汤绝影行泊一体中配方案
5.29.5 商汤绝影行泊一体高配方案
5.29.6 商汤绝影智驾能力(1)
5.29.7 商汤绝影智驾能力(2)
5.29.8 商汤汽车合作伙伴
5.30 魔视智能
5.30.1 公司简介
5.30.2 魔视智能产品布局及规划
5.30.3 魔视智能行泊一体解决方案
5.30.4 魔视智能行泊一体域控制器Magic Pilot 1.0
5.30.5 魔视智能行泊一体域控制器Magic Pilot 2.0
5.30.6 魔视智能行泊一体核心技术
5.30.7 核心优势及合作伙伴
5.31 佑驾创新
5.31.1 MINIEYE简介
5.31.2 MINIEYE行泊一体产品阵容
5.31.3 MINIEYE基于征程系列行泊一体产品
5.31.4 MINIEYE基于TI系列行泊一体产品
5.31.5 主要客户及发展动态
5.32 AutoBrain
5.32.1 公司简介
5.32.2 AutoBrain单SoC行泊一体域控产品
5.32.3 Autobrain行泊一体主要优势(1)
5.32.4 Autobrain行泊一体主要优势(2)
5.32.5 Autobrain 合作动态
5.33 Nullmax
5.33.1 公司简介
5.33.2 纽劢科技主要产品
5.33.3 纽劢科技MaxDrive 智驾解决方案
5.33.4 纽劢科技智驾核心能力(1)
5.33.5 纽劢科技智驾核心能力(2)
5.33.6 纽劢科技智驾核心能力(3)
5.33.7 合作伙伴及动态
5.34 智行者
5.34.1 智行者简介
5.34.2 智行者智能驾驶解决方案
5.34.3 智行者大算力行泊一体方案(1)
5.34.4 智行者大算力行泊一体方案(2)
5.34.5 智行者大算力行泊一体方案(3)
5.34.6 智行者核心技术(1)
5.34.7 智行者核心技术(2)
5.34.8 智行者核心技术(3)
5.34.9 智行者核心技术(4)
5.34.10 智行者合作动态
5.35 创时智驾
5.35.1 公司简介
5.35.2 创时智驾行泊一体域控制器产品阵容
5.35.3 创时智驾行泊一体域控制器iECU 1.5
5.35.4 创时智驾行泊一体域控制器iECU 3.1
5.35.5 创时智驾行泊一体域控制器iECU 3.5
5.35.6 创时智驾行泊一体域控制器软件平台
5.35.7 合作模式及动态
5.36 寅家科技
5.36.1 公司简介
5.36.2 寅家科技智能驾驶解决方案VT-Pilot 迭代
5.36.3 寅家科技行泊一体产品路线
5.36.4 寅家科技行泊一体2.0
5.36.5 寅家科技行泊/舱泊一体域控制器
5.36.6 寅家科技合作模式及伙伴
5.37 保隆科技
5.37.1 保隆科技简介
5.37.2 保隆科技智能驾驶业务及模式
5.37.3 子公司保隆领目行泊一体域控方案(1)
5.37.4 子公司保隆领目行泊一体域控方案(2)
5.37.5 保隆科技行泊一体解决方案
5.37.6 保隆科技行泊一体方案V-SEE 1.0
5.37.7 保隆科技行泊一体方案V-SEE 2.0
5.37.8 保隆科技行泊一体方案V-SEE 3.0
5.38 均联智行
5.38.1 均联智行简介
5.38.2 均联智行域控制器产品规划
5.38.3 均联智行自动驾驶域控制器
5.38.4 均联智行nDrive M 自动驾驶域控制器
5.38.5 均联智行nDrive H 自动驾驶域控制器
5.38.6 均联智行中央计算单元及方案
5.38.7 均联智行舱驾融合布局
5.38.8 均联智行最新动态
5.39 小马智行
5.39.1 小马智行简介
5.39.2【方载】智驾域控制器
5.39.3 【苍穹】数据闭环工具链
5.39.4【小马识途】 行泊一体方案
5.39.5【小马识途】PonyClassic 行泊一体方案
5.39.6【小马识途】核心技术 (1)
5.39.7【小马识途】核心技术 (2)
5.40 轻舟智航
5.40.1 轻舟智航简介
5.40.2 轻舟智航行泊一体解决方案
5.40.3 轻舟智航行泊一体方案:城市NOA版
5.40.4 轻舟智航核心智驾技术 (1)
5.40.5 轻舟智航核心智驾技术 (2)
5.40.6 轻舟智航合作伙伴及动态
5.41 元戎启行
5.41.1 元戎启行简介
5.41.2 元戎启行业务布局
5.41.3 元戎启行DeepRoute-Driver 解决方案
5.41.4 元戎启行行泊一体解决方案
5.41.5 元戎启行行泊一体方案D-PRO
5.41.6 元戎启行行泊一体产品D-AIR
5.41.7 元戎启行智驾核心技术
5.41.8 元戎启行最新动态
5.42 车联天下
5.42.1 车联天下简介
5.42.2 车联天下座舱域控产品
5.42.3 车联天下舱泊一体产品布局
5.42.4 车联天下舱驾融合产品
5.43 诺博科技
5.43.1 诺博科技产品布局
5.43.2 诺博科技舱泊一体产品及方案
5.44 镁佳科技
5.44.1 镁佳科技简介
5.44.2 镁佳科技舱驾融合产品
06 主要芯片商产品及方案研究
6.1 芯片企业主要产品及舱行泊方案
6.2 英伟达
6.2.1 英伟达自动驾驶芯片迭代
6.2.2 英伟达行泊一体芯片
6.2.3 英伟达舱驾融合芯片
6.2.4 英伟达生态伙伴
6.3 高通
6.3.1 高通汽车解决方案
6.3.2 高通座舱芯片迭代
6.3.3 高通Ride 芯片及产品组合
6.3.4 高通舱驾融合芯片
6.3.5 高通舱行泊合作伙伴
6.4 TI
6.4.1 TI 简介
6.4.2 TI TDA4 芯片
6.4.3 行泊一体芯片TDA4VM
6.4.4 双TDA4行泊一体方案实现方式
6.4.5 单芯片TDA4行泊一体方案实现方式
6.4.6 TDA4系列芯片优势
6.4.7 德州仪器行泊一体合作动态
6.5 安霸
6.5.1 安霸简介
6.5.2 安霸车规级芯片布局
6.5.3 安霸CV72AQ 及行泊一体方案(1)
6.5.3 安霸CV72AQ 及行泊一体方案(2)
6.5.3 安霸CV72AQ 及行泊一体方案(3)
6.5.3 安霸CV72AQ 及行泊一体方案(4)
6.5.4 安霸 CV3-AD 及方案
6.5.5 安霸合作伙伴及量产项目
6.6 地平线
6.6.1 地平线芯片迭代
6.6.2 基于征程3、征程5的主流行泊一体域控解决方案
6.6.3 征程3及行泊一体方案
6.6.4 征程5及行泊一体方案
6.6.5 地平线征程6
6.6.6 地平线征程系列合作伙伴
6.7 黑芝麻智能
6.7.1 黑芝麻智能简介
6.7.2 黑芝麻智能车载芯片
6.7.3 黑芝麻智能A1000平台
6.7.4 A1000L单SoC轻量级行泊一体参考方案
6.7.5 A1000单SoC高阶行泊一体参考方案
6.7.6 黑芝麻智能Drive Sensing行泊一体方案
6.7.7 黑芝麻智能A1000软件架构体系
6.7.8 黑芝麻智能C1200平台
6.7.9 基于C1200的典型汽车应用
6.7.10 黑芝麻智能芯片优势
6.7.11 黑芝麻智能提供的工具链开发包及应用支持
6.7.12 黑芝麻智能“山海”人工智能工具平台
6.7.13 黑芝麻智能合作模式及生态合作伙伴
6.7.14 黑芝麻智能合作动态
6.8 芯驰科技
6.8.1 芯驰科技芯片布局
6.8.2 座舱芯片X9系列及应用场景
6.8.3 基于X9的舱泊一体方案
6.8.4 智驾芯片V9 系列及应用场景
6.8.5 基于V9 的行泊一体方案
6.8.6 中央计算架构及参考设计
6.8.7 生态伙伴及量产项目
6.9 芯擎科技
6.9.1 芯擎科技简介
6.9.2 芯擎科技芯片解决方案
6.9.3 芯擎科技“龍鹰一号”
6.9.4 芯擎科技舱泊一体方案
6.9.5 芯擎科技舱驾一体方案
6.9.6 芯擎科技舱驾泊融合单芯片方案算力分析
6.9.7 芯擎科技合作伙伴及动态
6.10 超星未来
6.10.1 公司简介
6.10.2 智能驾驶计算芯片惊蛰R1
6.10.3 超星未来智能驾驶参考方案
6.10.4 超星未来高阶行泊一体参考方案
6.10.5 超星未来轻量级行泊一体参考方案
6.10.6 合作模式