一、OEM主机厂跨域融合的几种思路和策略探讨
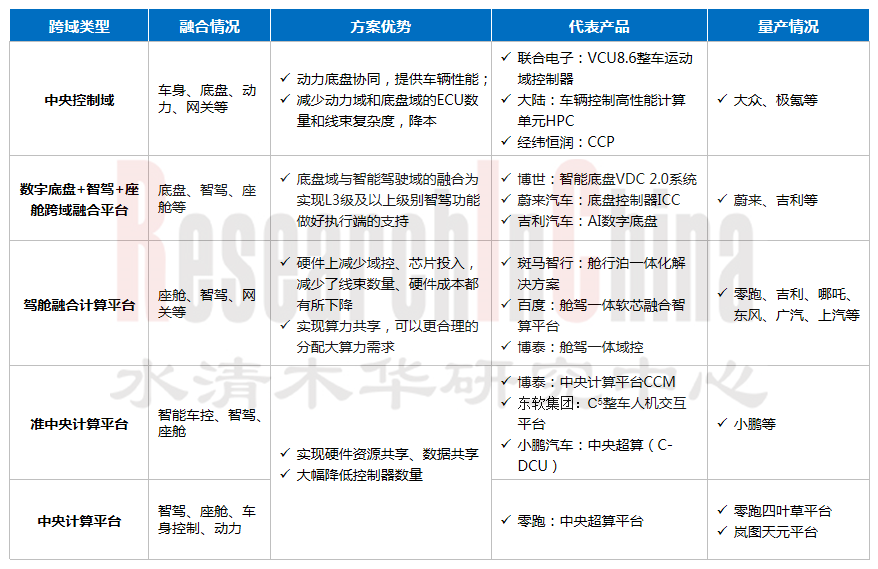
随着高级自动驾驶对算力、通讯带宽、软件、安全等方面的要求越来越严,汽车电子电气架构从域集中架构逐步向多域融合,再向中央计算架构演进。目前,汽车多域计算的主要融合思路主要有以下几种:
•中央控制域集成车身、底盘、动力、网关等;
•数字底盘集成智驾、座舱等;
•驾舱融合计算平台;
•准中央计算平台(One Box,多采用多板、多芯);
•中央计算平台(One Box,多采用单板,搭载单颗或多颗高性能芯片,采用板级互联技术)。
目前市场上,零跑汽车和岚图汽车已经演进到中央计算平台,小鹏进入准中央计算平台,大部分厂商也进入域融合阶段,其中驾舱融合计算平台发展较为火热。
部分主机厂和Tier1跨域融合思路
来源:佐思汽研《2024年智能汽车多域融合计算行业研究报告》
随着自动驾驶的发展,跨域融合势在必行,主机厂正加速落地跨域融合车型。
部分主机厂跨域融合量产车型总结
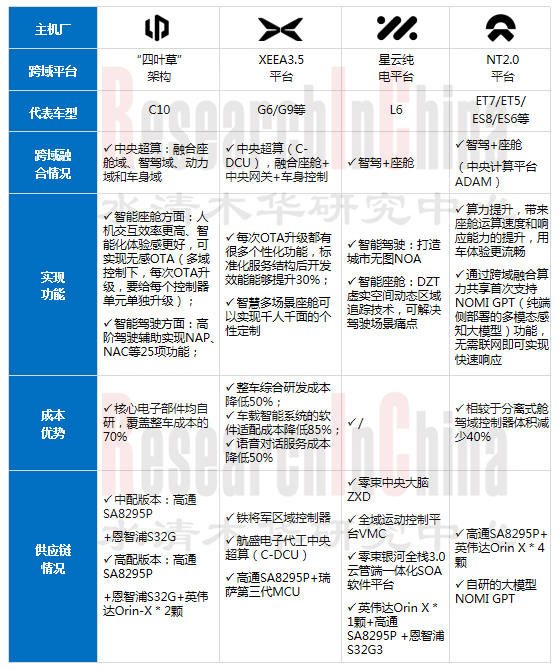
来源:佐思汽研《2024年智能汽车多域融合计算行业研究报告》
•蔚来中央计算平台ADAM
蔚来中央计算平台ADAM跨域方案为两颗芯片集成在同一块电路板上。中央计算平台ADAM可以让车内不同域之间不再需要编码解码,省去了编码和解码的芯片、电源、散热、线束等,通过电路板上的蚀刻电路直接取代千兆以太网,智驾和座舱之间跨域数据带宽从千兆大幅提升到16Gbps,实现10倍以上的传输速率提升。
此外,通过跨域算力共享可以更合理分配各个大算力需求,让智能驾驶芯片英伟达Orin X与智能座舱的8295芯片来解决各自擅长的任务。
来源:蔚来汽车
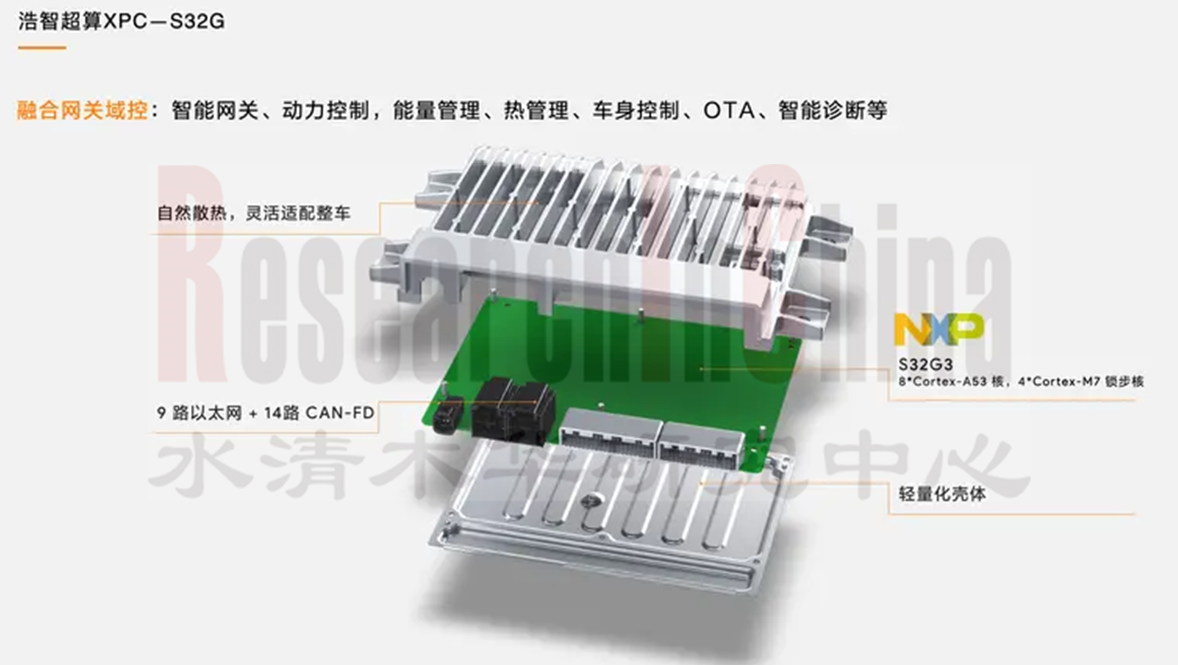
•哪吒汽车浩智超算XPC-S32G
2024年6月,哪吒汽车与NXP、经纬恒润、Wind River联合发布了首个融合网关域控产品:浩智超算XPC-S32G,该产品将首搭哪吒S新款车型于2024年下半年上市。
浩智超算XPC-S32G基于哪吒汽车山海平台可成长式电子电气EEI架构打造:
•搭载基于Arm Cortex-M7和 Cortex-A53的恩智浦高性能S32G3汽车网络处理器;
•搭载风河先进的RT-Linux操作系统解决方案;
•搭载基于强大的集成开发环境所打造面向服务的SOA软件架构。
哪吒汽车规划将浩智超算XPC-S32G作为整车网络中枢系统、面向服务SOA体系架构的基础。该系统可理解为车内通信主干网络的“中枢”,具备中央网关、整车热管理、电池能量管理、动力扭矩管理、远程诊断、标定、全量数据采集、SOA型服务网关、边缘计算及OTA Master九大功能,能够实现高安全跨域功能数据的互联,以及汽车网络安全防御,并负责车辆控制管理,保障信息以极低延迟输出,更拥有面向未来的整车功能迭代能力。
来源:哪吒汽车
二、Tier1 供应商跨域融合产品:从舱泊一体、舱驾融合平台、中央域控平台、准中央计算平台、中央计算平台等多个维度布局
产品开发方向(1):舱泊、舱驾域+功能域(网关、网联、车身、底盘等)融合
多域融合计算是汽车智能化发展的必然趋势,它可以简化整车电子电气架构,提高计算效率,大幅降低方案成本。2024年以来,主机厂已经陆续落地跨域融合架构,并逐步迭代至中央计算平台。而Tier 1供应商也在跨域融合解决方案上布局了众多产品,这些方案多采用以下三种方式,即单芯片(One SoC)融合方案、整机(One Box)融合方案、单板(One Board)融合方案,从目前供应商的布局看,做单芯片座舱+智驾融合的方案居多。
然而,中国市场对ADAS能力的要求较高,且自动驾驶技术迭代非常迅猛,所以为了保障高阶自动驾驶的落地,在方案中往往需要同时配置高性能座舱SoC与高性能的智能驾驶SoC,即单板或One box融合两个SoC。在这个方向上,Tier 1也纷纷加大跨域产品方案的研发,如亿咖通、均联智行、车联天下、博泰、大陆、德赛西威等供应商,纷纷推出了相关跨域融合解决方案。
部分供应商跨域融合方案

来源:佐思汽研《2024年智能汽车多域融合计算行业研究报告》
亿咖通的跨域融合方案分为“舱泊”、“舱驾”两个类型,其中基于“龍鹰一号”芯片的单芯片“舱泊一体”方案已经搭载于银河E5车型量产上市,实现了智能座舱、自动泊车功能的整合。

来源:亿咖通
而舱驾融合解决方案则计划于2025年在车型上量产,分为两个系列:
•其一为面向基础“舱行泊”功能的高性价比方案,如“汽车大脑®安托拉系列”,采用了AI算力较强的座舱SoC龍鹰一号,在原座舱能力的基础上,额外装配2MP的双目摄像头,即可支持“舱行泊”功能的开发,包括HWA(高速公路辅助)、ALC(自动变道辅助)、APA(自动泊车辅助)、RPA(遥控泊车),以及DMS(驾驶员监控系统)、全场景语音交互、HMI(人机界面)等功能。

来源:亿咖通
•其二为面向高阶“舱行泊”功能的高性能方案 ,如“汽车大脑系列”,通过单板融合智能座舱+智能驾驶两颗高性能SoC,实现舱驾一体,通过亿咖通云山跨域软件平台,算力可以合理分配到各需求模块,采用PCIe高速数据传输,传输效率比传统提升10倍以上。在两颗SoC高算力加持下,支持L2+及以上的高阶自动驾驶功能,以匹配主流市场对高阶自动驾驶的需求。同时整体架构的可拓展设计也为未来芯片算力分配提供了更好的灵活性。融合后的软硬件大幅提升了方案的开发效率同时显著降低了方案的BOM成本。

来源:亿咖通
产品开发方向(2):车身电子向中央控制延伸,融合数字底盘、动力、新能源系统等
传统车身电子产品逐步发展跨域中央控制器产品,进一步和底盘、动力、新能源系统一起集成。
以联合电子为例,为适应未来汽车全新E/E架构方面客户对硬件和软件的需求,联合电子于2021年4月成立了跨域控制业务部(先进网联业务部),该部门由原电子控制器业务部和车身电子业务部门整合而来。2024年开始,组织架构进一步整合,所有低压控制器业务也将合并到跨域控制业务部。
联合电子跨域业务单元推出了车载计算平台(VCP)、区域控制器(ZECU)、车身域控制器和智能电网管理模块(PNG)等硬件产品,以及服务化的软件架构(SOA)推出USP软件开发平台。
2023年联合电子已获取并同步为8家客户开发新架构上的“中央计算+区域控制器+SOA”平台,并在2023年6月实现中国市场首个区域控制器产品的量产,通过区域化的架构可以实现近20个独立ECU的集成,通信速率从2M提升至最高1000M。
联合电子跨域融合产品部署

来源:佐思汽研《2024年智能汽车多域融合计算行业研究报告》
三、跨域融合软件平台:实现跨域计算的能力基座
单芯片融合部署多个功能集合时,软件复杂度会明显增加,由此为OEM带来了新的担心,也是亟需要解决的问题,亿咖通、均联智及(NESINEXT)、中科创达、诚迈科技等推出相应跨域软件解决方案。
亿咖通·云山(ECARX Cloudpeak)跨域软件平台
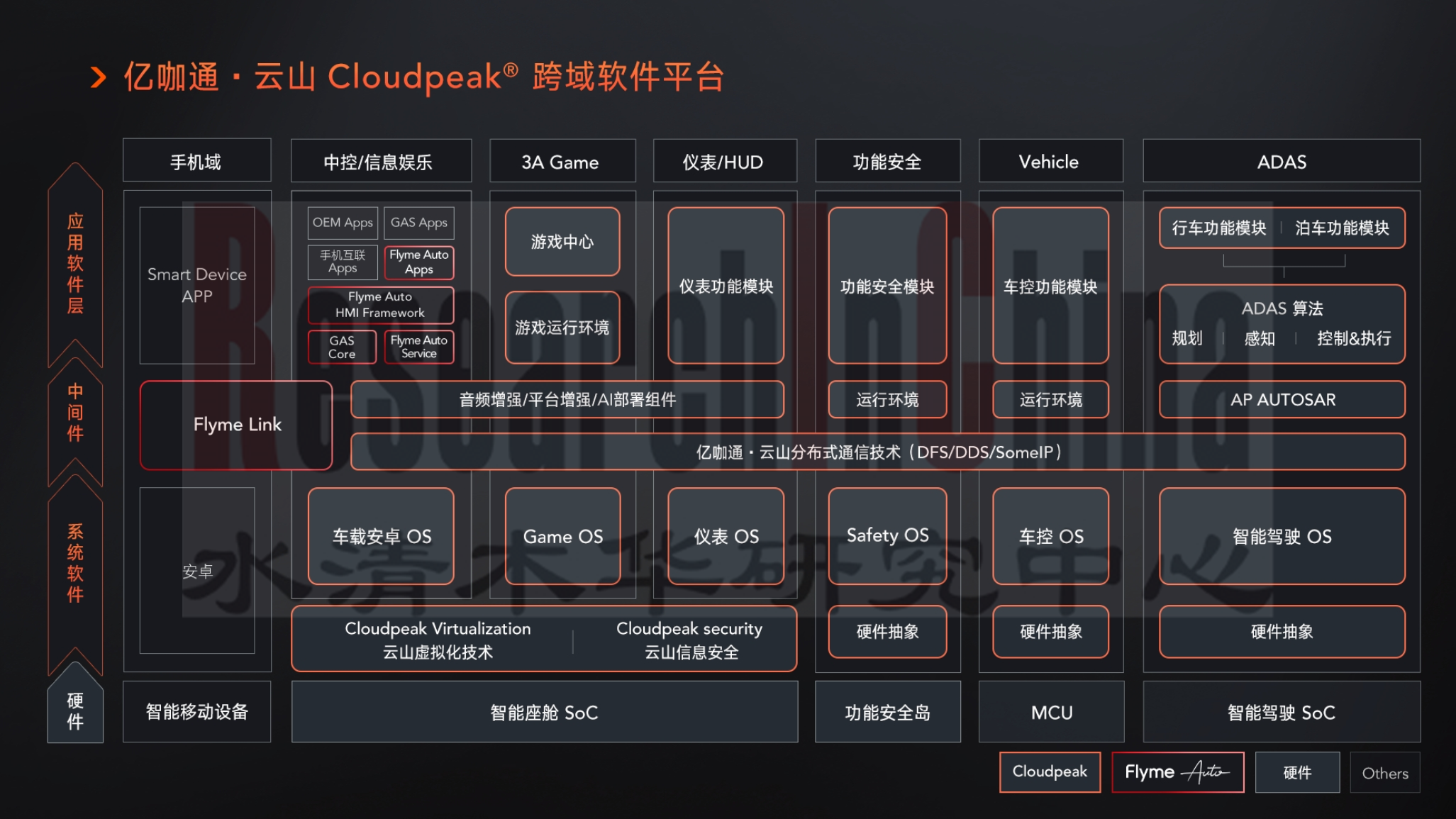
针对跨域融合、中央计算的发展趋势以及全球交付的实际量产需求,亿咖通推出了面向全球智能汽车市场打造的云山(ECARX Cloudpeak)跨域软件平台,采用SOA(面向服务的架构)理念设计,确保了组件的标准化和模块化,涵盖了底层系统软件(Cloudpeak Virtualization)、多操作系统、中间件、上层应用模块以及全球应用生态,可与旗下不同计算平台结合构成完整解决方案,轻松实现功能跨域,目前已在多个量产车型上实现部署。
来源:亿咖通
在即将量产发布的领克Z10智能座舱方案中,得益于ECARX Cloupeak对于座舱、智驾系统的互联互通,将与智驾关联的传感器感知到的图像信息通过处理后实时呈现在中控屏,同时融合了座舱域的车道级导航和智驾域的NOA功能,完美呈现了一个“人机共驾”界面,实现了还原真实物理世界的沉浸式交互体验。

来源:亿咖通
均联智及(NESINEXT)CoreFusion舱驾一体软件开放平台
均联智及(NESINEXT)与黑芝麻智能联合打造舱驾一体软件开放平台,基于武当C1296芯片开发,可以很好的解决了单SoC跨域融合功能部署的难点和痛点,可为主机厂以及生态合作伙伴提供全栈、高效、低成本开发的操作系统级软件底座、开发工具链及生态体系。
均联智行具备成熟的工具链,打造了可支撑C1200系列芯片平台的智能座舱框架、智能驾驶AP/CP中间件以及自动化适配工具。且均联智行与黑芝麻智能已合作多年,在舱驾融合操作系统级的软件底座、开发工具链及完整的生态系统等领域已经展开了深入的合作。
在中央计算架构趋势下,车载操作系统开始由域操作系统向整车操作系统演进,通过中央计算平台融合座舱操作系统、智驾操作系统、安全车控操作系统的功能,可提升车企开发效率。
均联智及(NESINEXT)CoreFusion舱驾一体软件开放平台

来源:佐思汽研《2024年智能汽车多域融合计算行业研究报告》
蔚来汽车全域操作系统天枢SkyOS
蔚来智能电动汽车整车全域操作系统天枢SkyOS,是蔚来整车底层操作系统,为整车研发建立全方位、立体的技术体系,使各种设备能够有机地融合在一起,实现高效协同工作。
天枢SkyOS构建起了“1+4+N”技术集群,涵盖车控、智驾、座舱、移动互联等多个领域,成为全面且领先的智能数字技术基座。蔚来全栈自研了四个子内核系统,包括「SkyOS - M」、「SkyOS-L」、「SkyOS-R」和「SkyOS-C」。
•SkyOS-L:首个实现AutoSAR的国产替代并规模化商用的实时操作系统。在与 AUTOSAR 的对比中,无论是高优先级、中优先级还是低优先级的指令,SkyOS-L 都能稳定执行,AUTOSAR 在中优先级和低优先级的指令中,准确送达能力就不如 SkyOS-L。
•SkyOS-M:是微内核架构,运行在中央大脑中,主要控制车身、底盘、悬架等,内核较传统Linux更稳定,服务隔离做的更好,同时在安全隔离的基础上,还有四层监控和三层恢复的安全机制。
•SkyOS-C:基于 Android 深度定制的操作系统,承载了智能座舱的功能,自研TOX协议栈,数据传输更稳定,还有包括NOMI在内的AI智能体验。
•SkyOS-R:提升系统的负载能力。
01 典型的多域计算架构思路
1.1 多域融合计算发展思路
1.1.1 多域融合发展趋势:横向融合、算力集中(1)
1.1.2 多域融合发展趋势:横向融合、算力集中(2)
1.1.3 多域计算最常见的演进逻辑
1.1.4 多域计算发展路径
1.1.5 多域计算五类设计思路
1.1.6 多域融合需要“集成式”开发
1.1.7 跨域融合发展带来开发、管理等诸多挑战
1.1.8 跨域融合可带来更多切实际的应用服务:预测性电池热管理
1.2 跨域计算产品及思路(Tier 1的视角)
1.2.1 国内Tier1多域计算产品及思路总结(1)
1.2.2 国内Tier1多域计算产品及思路总结(2)
1.2.3 国内Tier1多域计算产品及思路总结(3)
1.2.4 国内Tier1多域计算产品及思路总结(4)
1.2.5 国内Tier1多域计算产品及思路总结(5)
1.2.6 国内Tier1多域计算产品及思路总结(6)
1.2.7 国外Tier1多域计算合作思路总结(1)
1.2.8 国外Tier1多域计算合作思路总结(2)
1.3 跨域计算产品及思路(主机厂的视角)
1.3.1 2024年是跨域(中央计算+区域控制器)元年
1.3.2 多域融合发展可提升OEM竞争力
1.3.3 主机厂多域融合演进
1.3.4 OEM主机厂多域融合布局及观点(1)
1.3.5 OEM主机厂多域融合布局及观点(2)
1.3.6 跨域融合量产车型总结(1)
1.3.7 跨域融合量产车型总结(2)
1.3.8 跨域融合量产车型总结(3)
02 多域计算平台
2.1 中央控制域(车身、底盘、动力、网关)
2.1.1 Tier 1中央控制域(车身、底盘、动力、网关)产品选型总结(1)
2.1.2 Tier 1中央控制域(车身、底盘、动力、网关)产品选型总结(2)
2.1.3 主机厂中央控制域(车身、底盘、动力、网关)产品应用情况
2.1.4 中央控制域(基于NXP最新一代异构SOC):经纬恒润CCP
2.1.5 中央控制域:联合电子VCU8.6
2.1.6 中央控制域(基于NXP S32G)
2.1.7 中央控制域(基于NXP S32G399 )
2.1.8 中央控制域:比亚迪天璇跨域计算平台
2.1.9 中央控制域(基于NXP S32G ):广汽星灵架构中央计算机
2.1.10 中央控制域:极氪
2.1.11 中央控制域:极氪软件功能部署
2.1.12 中央控制域:极氪汽车行驶区域控制器
2.1.13 中央控制域(基于瑞萨的RCAR-M3)
2.2 数字底盘+智驾+座舱多域融合
2.2.1 底盘域融合的三条路线
2.2.2 智能底盘最终会走向软硬分离的跨域融合(1)
2.2.3 智能底盘最终会走向软硬分离的跨域融合(2)
2.2.4 智能底盘跨域融合处于2.0阶段
2.2.5 Tier 1底盘域+智驾域跨域融合装车情况
2.2.6 Tier 1底盘域+智驾域跨域融合装车情况
2.2.7 数字底盘+智驾+座舱多域融合(1)
2.2.8 数字底盘+智驾+座舱多域融合(2)
2.2.9 数字底盘+智驾+座舱多域融合(3)
2.3 舱驾融合计算平台
2.3.1 驾舱融合形态将是多样性的
2.3.2 驾舱融合市场从行泊一体/舱泊一体向驾舱融合演进
2.3.3 驾舱融合的技术演进路线
2.3.4 舱驾融合计算平台发展现状及趋势:舱泊一体方案
2.3.5 舱驾融合计算平台发展现状及趋势:舱行泊一体
2.3.6 舱驾融合计算平台发展现状及趋势:舱驾一体
2.3.7 驾舱融合的主要形式
2.3.8 国内厂商驾舱融合计算平台型号统计(1)
2.3.9 国内厂商驾舱融合计算平台型号统计(2)
2.3.10 国内厂商驾舱融合计算平台型号统计(3)
2.3.11 国内厂商驾舱融合计算平台型号统计(4)
2.3.12 国内厂商驾舱融合计算平台型号统计(5)
2.3.13 国内厂商驾舱融合计算平台型号统计(6)
2.3.14 国内厂商驾舱融合计算平台型号统计(7)
2.3.15 国外厂商驾舱融合计算平台型号统计(1)
2.3.16 国外厂商驾舱融合计算平台型号统计(2)
2.3.17 驾舱融合计算平台架构(1)
2.3.18 驾舱融合计算平台架构(2)
2.3.19 驾舱融合计算平台架构(3)
2.3.20 驾舱融合计算平台架构(4)
2.3.21 驾舱融合计算平台(基于芯驰科技X9SP):斑马智行一体域控制器
2.3.22 驾舱融合计算平台(基于高通SA8295+NXPS32G):零束跨域融合中央大脑ZXD1
2.3.23 驾舱融合计算平台(基于NXP S32G):哪吒汽车驾舱一体域
2.3.24 驾舱融合计算平台(基于高通SA8775)(1)
2.3.25 驾舱融合计算平台(基于高通SA8775)(2)
2.3.26 驾舱融合计算平台(基于高通SA8775)(3)
2.3.27 驾舱融合计算平台(高通8155+地平线J3):博泰车联网+纵目“舱行泊一体”域控
2.3.28 驾舱融合计算平台(基于高通SA8775)(4)
2.3.29 驾舱融合计算平台(基于高通SA8775)(5)
2.3.30 驾舱融合计算平台(基于芯驰科技X9U+地平线J5):上海金脉MADC 3.5
2.3.31 驾舱融合计算平台(芯驰科技X9U+地平线J3/J5):禾多科技&斑马智行
2.4 准中央计算平台(驾舱、车身、网关、5G、VCU等)平台
2.4.1 Tier 1准计算平台( 驾舱、车身、网关、5G、VCU等)型号统计(1)
2.4.2 Tier 1准计算平台( 驾舱、车身、网关、5G、VCU等)型号统计(2)
2.4.3 准中央计算平台(基于高通8295+地平线J5)
2.4.4 准中央计算平台(基于SA8295+NXPS32G)
2.4.5 准中央计算平台(基于英伟达Orin+高通SA8295 +黑芝麻A1000 )
2.5 单芯片(One chip)中央计算平台
2.5.1 中央计算平台:单芯片(one chip)产品选型
2.5.2 One chip跨域计算平台(基于黑芝麻武当C1296):均联智行中央计算单元技术路线
2.5.3 One chip跨域计算平台(基于黑芝麻武当C1296):均联智行基于SOA的人机共驾系统设计
2.5.4 One chip跨域计算平台(基于X9系列):东软睿驰X-Center 2.0
2.5.5 单芯片(One chip)中央计算 SoC选型(1)
2.5.6 单芯片(One chip)中央计算 SoC选型(2)
2.5.7 单芯片(One chip)中央计算 SoC选型(3)
2.5.8 单芯片(One chip)中央计算 SoC :Thor中央计算方案布局
2.5.9 单芯片(One chip)中央计算 SoC :芯驰科技X9系列
2.5.10 单芯片(One chip)中央计算 SoC :面向中央计算的多核异构X9CC
2.5.11 单芯片(One chip)中央计算 SoC :基于X9系列的中央计算架构方案
03 多域计算平台供应链
3.1 多域计算对软件的影响:OEM主机厂的视角
3.1.1 跨域融合计算促进软硬件解耦(1)
3.1.2 跨域融合计算促进软硬件解耦(2)
3.1.3 跨域融合计算需要统一的软件架构平台( 以ARMSOAFEE架构为例)
3.1.4 软件架构升级
3.1.5 整车OS核心软件层
3.1.6 主机厂整车OS主要布局方式
3.1.7 主机厂自研整车OS主要限制因素
3.1.8 主机厂跨域软件总结:OS系统
3.1.9 主机厂跨域操作系统(基于高通第三代骁龙座舱平台):银河OS
3.1.10 主机厂OS布局模式典型案例(1)
3.1.11 主机厂OS布局模式典型案例(2)
3.1.12 主机厂OS布局模式典型案例(3)
3.1.13 主机厂OS布局模式典型案例(4)
3.1.14 主机厂OS布局模式典型案例(5)
3.1.15 主机厂OS布局模式典型案例:蔚来自研全域OS
3.1.16 主机厂OS布局模式典型案例:奔驰MB.OS
3.2 多域计算对软件的影响:Tier1供应商的视角
3.2.1 跨域融合软件开发技术:虚拟化、云原生开发、容器化
3.2.2 跨域融合软件开发平台:USP平台
3.2.3 跨域软件发展趋势:向整车级OS演进
3.2.4 整车OS开发模式的演变
3.2.5 供应商整车OS市场机会
3.2.6 汽车OS软件供应商角色演变
3.2.7 整车OS趋势下,商业模式的演变
3.2.8 整车OS业务模式市场变化:软件OS供应商与硬件芯片商绑定,深度合作
3.2.9 Tier 1跨域软件总结:整车OS系统
3.2.10 跨域操作系统(基于高通SA8775):中科创达滴水OS(1)
3.2.11 跨域操作系统(基于高通SA8775):中科创达滴水OS(2)
3.2.12 跨域操作系统(基于高通SA8775):诚迈科技Fusion OS(1)
3.2.13 跨域操作系统(基于高通SA8775):诚迈科技Fusion OS(2)
3.2.14 跨域操作系统:斑马Alios向整车OS发展
3.2.15 跨域操作系统:斑马整车OS业务模式
3.2.16 跨域操作系统:斑马与智己汽车深度合作模式
3.2.17 跨域操作系统:易特驰端到端的整车OS解决方案
3.2.18 跨域操作系统:光庭信息Kcar-OS
3.2.19 Tier 1跨域软件总结:软件平台
3.2.20 跨域软件平台:亿咖通ECARX Cloudpeak(1)
3.2.21 跨域软件平台:亿咖通ECARX Cloudpeak(2)
3.2.22 跨域软件平台:均联智行CoreFusion
3.2.23 跨域软件平台:东软睿驰NeuSAR 4.0
3.2.24 跨域软件平台:华为iDVP
3.3 多域计算对MCU的影响
3.3.1 传统架构下MCU的使用
3.3.2 跨域融合布局可以省掉一部分MCU
3.3.3 跨域融合架构中MCU应用灵活部署
3.3.4 跨域高速MCU产品总结(1)
3.3.5 跨域高速MCU产品总结(2)
3.3.6 跨域高速MCU产品总结(3)
3.3.7 跨域高速MCU产品总结(4)
3.3.8 跨域MCU:芯驰科技车身+底盘+动力跨域融合芯片E3650
3.3.9 跨域MCU:芯驰科技面向下一代跨域架构的网关芯片产品G9H(1)
3.3.10 跨域MCU:芯驰科技面向下一代跨域架构的网关芯片产品G9H(2)
3.3.11 跨域MCU:NXP S32N55
3.3.12 跨域MCU:NXP S32G399
3.3.13 跨域MCU:德州仪器Zonal EEA网关芯片Jacinto™ DRA821
3.4 多域计算对VCU的影响
3.4.1 传统架构下独立VCU的结构(1)
3.4.2 传统架构下独立VCU的结构(2)
3.4.3 跨域计算趋势下VCU的集成方向(1)
3.4.4 跨域计算趋势下VCU的集成方向(2)
3.4.5 VCU被集成到域控制器
3.4.6 VCU集成到整车控制域
3.4.7 跨域融合趋势下VCU市场格局发生变化
3.5 多域计算对ECU的影响
3.5.1 传统架构下ECU分布广泛
3.5.2 多域计算趋势下,大量ECU将被集成至HPC或跨域计算平台
3.5.3 主机厂集成ECU的规划
04 主机厂多域计算技术布局
4.1 吉利汽车
4.1.1 极氪中央超算平台架构
4.1.2 极氪跨域通信标准
4.1.3 吉利多域计算软件布局:ZEEKR EE 3.0中央计算平台
4.1.4 吉利多域计算软件布局:SOA软件服务架构
4.1.5 吉利多域计算软件布局:吉利银河OS跨域融合操作系统
4.2 上汽
4.2.1 上汽多域融合计算系统总结:第一代
4.2.2 上汽多域融合计算系统总结:第二代
4.2.3 上汽多域计算布局:全域运动控制平台VMC(1)
4.2.4 上汽多域计算技术布局:全域运动控制平台VMC(2)
4.2.5 上汽零束多域计算布局:SOA软件平台(1)
4.2.6 上汽零束多域计算布局:SOA软件平台(2)
4.2.7 上汽多域计算布局:零束中央大脑ZXD1
4.2.8 上汽多域计算布局:零束中央大脑ZXD2
4.2.9 上汽多域计算布局:智己L6舱驾融合计算平台
4.3 广汽
4.3.1 广汽多域融合计算系统总结
4.3.2 广汽多域计算布局:GA3.0“星灵架构”
4.3.3 广汽多域计算布局:SOA软件平台
4.4 长城汽车
4.4.1 长城多域融合计算系统总结
4.4.2 长城多域计算布局:舱驾一体中央计算+SOA软件拓扑
4.4.3 长城多域计算布局:长城GEEP 4.0准中央多域计算布局
4.4.4 长城多域计算布局:长城GEEP 5.0中央计算平台
4.5 一汽红旗
4.5.1 一汽红旗多域融合计算系统总结
4.5.2 一汽红旗多域计算布局:基于中央计算平台的HIS架构
4.5.3 一汽红旗多域计算布局:2025年量产车控平台
4.5.4 一汽红旗多域计算布局:TSN以太网多域控制器
4.6 比亚迪
4.6.1 比亚迪多域融合计算系统总结
4.6.2 比亚迪跨域计算平台:天璇
4.6.3 比亚迪多域计算布局:“易四方”系统
4.7 长安
4.7.1 长安多域融合计算系统总结
4.7.2 长安多域融合架构优势
4.7.3 长安CIIA 2.0多域计算布局:SDA架构
4.8 理想
4.8.1 理想多域融合计算系统总结:LEEA2.0 & LEEA3.0 功能模块和供应链总结(1)
4.8.2 理想多域融合计算系统总结:LEEA2.0 & LEEA3.0 功能模块和供应链总结(2)
4.8.3 理想多域融合计算向中央集中架构迭代
4.8.4 理想LEEA 2.0多域计算布局:中央域控制器(XCU)
4.8.5 理想LEEA 3.0中央集中计算布局(1)
4.8.6 理想LEEA 3.0中央集中计算布局(2)
4.8.7 理想LEEA3.0中央计算布局:通信网络架构
4.9 小鹏
4.9.1 小鹏多域融合计算系统及供应链总结:XEEA3.5(1)
4.9.2 小鹏多域融合计算系统及供应链总结:XEEA3.5(2)
4.9.3 小鹏汽车多域计算布局:构建跨域融合智能底座
4.9.4 小鹏构建跨域融合智能底座:实现软硬件解耦,硬件资源最优分配
4.9.5 小鹏汽车多域计算布局:中央计算架构
4.9.6 小鹏多域计算布局:中央超算平台架构
4.9.7 小鹏多域计算布局:中央计算域和智驾域软件架构
4.9.8 小鹏多域计算布局:整车通信中间件
4.9.9 小鹏多域计算布局:虚拟化技术
4.9.10 小鹏多域计算案例:智驾摄像头与座舱摄像头共享
4.10 蔚来
4.10.1 蔚来多域融合计算系统总结:NT2.0 & NT3.0 功能模块和供应链总结(1)
4.10.2 蔚来多域融合计算系统总结:NT2.0 & NT3.0 功能模块和供应链总结(2)
4.10.3 蔚来跨域方案实现降本
4.10.4 蔚来实现跨域算力融合
4.10.5 蔚来通过跨域算力共享带来车用创新的大模型——NOMI GPT
4.10.6 蔚来多域计算布局:中央计算平台ADAM
4.10.7 蔚来多域计算布局:互联中央网关LION融合车身域
4.10.8 蔚来多域计算布局:智能底盘域控制器ICC与智驾域跨域融合
4.10.9 蔚来多域计算布局:SKY OS整车级操作系统
4.11 哪吒
4.11.1 哪吒多域融合计算系统总结
4.11.2 哪吒多域计算布局:首个融合域控浩智超算XPC-S32G(1)
4.11.3 哪吒多域计算布局:首个融合域控浩智超算XPC-S32G(2)
4.11.4 哪吒多域计算布局:山海平台(Gen.2 EEI)中央超算系统
4.11.5 哪吒多域计算布局:走向多域融合和中央计算
4.11.6 哪吒多域计算布局:自研中央计算平台
4.11.7 哪吒多域计算布局:基于高通SA8255P、高通SA8775P的舱驾融合方案
4.12 零跑
4.12.1 零跑多域融合计算系统总结
4.12.2 零跑多域计算布局:用两颗芯片实现四域融合(1)
4.12.3 零跑多域计算布局:用两颗芯片实现四域融合(2)
4.12.4 零跑多域计算布局:中央集成式电子电气架构实现整车成本70%的自研自造能力
4.13 大众
4.13.1 大众多域融合计算系统总结
4.13.2 大众采用小鹏超算平台+区域控制架构
4.13.3 大众多域计算布局:ICAS3驾舱域控制器系统架构
4.13.4 大众多域计算布局:ICAS3驾舱域控制器域扩展与域融合
4.13.5 大众多域计算布局:大众ICAS3智能驾舱域控制器跨域通讯的安全机制
4.13.6 大众多域计算布局:大众ICAS1网络架构
4.14 岚图
4.14.1 岚图多域融合计算系统总结
4.14.2 岚图“天元”多域计算布局:中央控制器OIB
4.15 特斯拉
4.15.1 特斯拉CCM中央计算模块
4.16 OEM主机厂多域计算总结
4.16.1 零跑跨域融合路径
4.16.2 小鹏跨域融合路径
4.16.3 蔚来跨域融合路径
4.16.4 理想跨域融合路径
4.16.5 哪吒跨域融合路径
4.16.6 岚图跨域融合路径
4.16.7 上汽跨域融合路径
05 国内Tier1多域计算技术布局
5.1 亿咖通
5.1.1 亿咖通多域计算产品布局
5.1.2 亿咖通跨域布局(芯片):龍鹰一号
5.1.3 亿咖通跨域布局(芯片):龍鹰一号与高通8155的对比
5.1.4 亿咖通跨域布局(驾舱融合计算平台):基于高通SA8295P派克平台
5.1.5 亿咖通跨域布局(驾舱融合计算平台):基于龍鷹一号、A1000的ECARX Super Brain(1)
5.1.6 亿咖通跨域布局(驾舱融合计算平台):基于龍鷹一号、A1000的ECARX Super Brain(2)
5.1.7 亿咖通跨域布局(驾舱融合计算平台):基于高通SA8255P阿特拉斯平台
5.1.8 亿咖通跨域布局(驾舱融合计算平台):安托拉系列
5.1.9 亿咖通跨域布局(驾舱融合计算平台):基于芯擎龍鹰一号Antora 1000(1)
5.1.10 亿咖通跨域布局(驾舱融合计算平台):基于芯擎龍鹰一号Antora 1000(2)
5.1.11 亿咖通跨域布局(驾舱融合计算平台):基于芯擎龍鹰一号Antora 1000 Pro(1)
5.1.12 亿咖通跨域布局(驾舱融合计算平台):基于芯擎龍鹰一号Antora 1000 Pro(2)
5.1.13 亿咖通跨域布局(驾舱融合计算平台):基于芯擎龍鹰一号Antora 1000 Pro(3)
5.1.14 亿咖通跨域布局(软件):云山跨域软件平台量产沃尔沃EX30
5.1.15 亿咖通跨域布局(软件):舱驾一体大模型架构
5.2 东软睿驰
5.2.1 东软睿驰智能座舱向着多域计算演进
5.2.2 东软睿驰多域计算产品布局
5.2.3 东软睿驰跨域布局(驾舱融合计算平台):基于芯驰科技X9CC的X-Center 2.0
5.2.4 东软睿驰跨域布局(座舱车身网关融合):基于高通8295、NXP S32G的C5人机交互平台(1)
5.2.5 东软睿驰跨域布局(座舱车身网关融合):基于高通8295、NXP S32G的C5人机交互平台(2)
5.2.6 东软睿驰跨域布局(座舱车身网关融合):基于高通8295、NXP S32G的C5人机交互平台(3)
5.2.7 东软睿驰跨域布局(软件):跨域融合软件平台NeuSAR(1)
5.2.8 东软睿驰跨域布局(软件):跨域融合软件平台NeuSAR (2)
5.2.9 东软睿驰跨域布局(软件):跨域融合中间件NeuSAR SF(1)
5.2.10 东软睿驰跨域布局(软件):跨域融合中间件NeuSAR SF (2)
5.2.11 东软睿驰跨域布局(软件):面向多域融合时代的openVOC开放技术框架
5.2.12 东软睿驰跨域布局(软件):“软件先行”开发模式
5.3 德赛西威
5.3.1 德赛西威多域计算产品布局
5.3.2 德赛西威多域计算布局:向着中央计算平台演进
5.3.3 德赛西威跨域布局(舱驾融合计算平台):基于高通SA8775的ICPS01E中央计算平台
5.3.4 德赛西威跨域布局(舱驾融合计算平台):Gen1 ICP(Aurora)
5.3.5 德赛西威跨域布局(舱驾融合计算平台):第一代ICP(Aurora)设计思路(1)
5.3.6 德赛西威跨域布局(舱驾融合计算平台):第一代ICP(Aurora)设计思路(2)
5.3.7 德赛西威跨域布局(舱驾融合计算平台):第一代ICP(Aurora)软件架构
5.3.8 德赛西威跨域布局(舱驾融合计算平台):第一代ICP(Aurora)主要特点
5.3.9 德赛西威跨域布局(舱驾融合计算平台):第一代ICP(Aurora) 存算一体融合
5.3.10 德赛西威跨域布局(舱驾融合计算平台):基于高通SA8295P的G9PH
5.3.11 德赛西威联合英伟达、吴铂推动舱驾融合、中央计算平台落地
5.4 博泰车联网
5.4.1 博泰车联网多域融合布局:两条腿走路
5.4.2 博泰车联网多域计算产品布局
5.4.3 博泰跨域布局(中央计算平台):基于高通8295、地平线征程5的CCM
5.4.4 博泰跨域布局(驾舱融合计算平台):基于高通SA8295P平台舱驾一体域控
5.4.5 博泰跨域布局(驾舱融合计算平台):基于高通8155+地平线J3舱行泊一体域控(1)
5.4.6 博泰跨域布局(驾舱融合计算平台):基于高通8155+地平线J3舱行泊一体域控(2)
5.5 联合电子
5.5.1 联合电子产品供应模式
5.5.2 联合电子关于跨域融合的思考:应用服务创新
5.5.3 联合电子多域计算产品布局
5.5.4 联合电子跨域布局:基于NXP S32G的车载计算平台VCP 1.0
5.5.5 联合电子跨域布局:新一代车辆运动融合控制平台VCU8.6
5.5.6 联合电子跨域布局:车辆运动融合控制平台VCU8.5(1)
5.5.7 联合电子跨域布局:车辆运动融合控制平台VCU8.5(2)
5.5.8 联合电子跨域布局:车辆运动融合控制平台VCU8.5(3)
5.5.9 联合电子跨域布局:车辆运动融合控制平台VCU8.5(4)
5.5.10 联合电子跨域布局:VCU8.5四驱控制功能架构
5.5.11 联合电子跨域布局:VCU8.5复位后自动恢复可行驶状态
5.5.12 联合电子跨域布局:VCU8.5 充电控制软件架构
5.5.13 联合电子跨域布局:VCU8.5热管理需求
5.6 经纬恒润
5.6.1 经纬恒润多域融合布局
5.6.2 经纬恒润多域计算产品布局
5.6.3 经纬恒润跨域布局(中央计算平台):基于NXP S32G的CCP
5.6.4 经纬恒润跨域布局:中央架构SOA整车测试
5.7 中科创达
5.7.1 中科创达多域融合布局:2024年量产舱驾合一平台
5.7.2 中科创达多域融合布局:旗下畅行智驾由行泊一体向舱驾一体发展
5.7.3 中科创达多域计算产品布局
5.7.4 中科创达跨域融合布局(驾舱融合平台)(1)
5.7.5 中科创达跨域融合布局(驾舱融合平台)(2)
5.7.6 中科创达跨域融合布局(驾舱融合平台)(3)
5.7.7 中科创达跨域融合布局(驾舱融合平台)(4)
5.7.8 中科创达跨域融合布局(软件):中央计算平台软件架构
5.7.9 中科创达跨域融合布局(软件):基于高通8255的滴水OS
5.7.10 中科创达跨域融合布局(软件):SOA中间件平台
5.8 映驰科技
5.8.1 映驰科技多域计算产品布局
5.8.2 映驰科技跨域融合布局(驾舱融合计算平台)
5.8.3 映驰科技跨域融合布局(软件):EMOS平台(1)
5.8.4 映驰科技跨域融合布局(软件):EMOS平台(2)
5.8.5 映驰科技跨域融合布局(软件):EMOS平台(3)
5.8.6 映驰科技跨域融合布局(软件):EMOS平台(4)
5.8.7 映驰科技跨域融合布局(软件):TSN协议栈
5.8.8 映驰科技跨域融合布局(工具):中央计算开发套件
5.9 车联天下
5.9.1 车联天下跨域融合规划
5.9.2 车联天下多域计算产品布局
5.9.3 车联天下跨域布局(舱驾融合计算平台)(1)
5.9.4 车联天下跨域布局(舱驾融合计算平台)(2)
5.9.5 车联天下跨域布局(舱驾融合计算平台)(3)
5.10 航盛电子
5.10.1 航盛电子多域计算产品布局
5.10.2 航盛电子跨域布局(驾舱融合计算平台)(1)
5.10.3 航盛电子跨域布局(驾舱融合计算平台)(2)
5.10.4 航盛电子跨域布局(驾舱融合计算平台)(3)
5.11 均联智行
5.11.1 均联智行多域计算产品布局
5.11.2 均联智行跨域布局(驾舱融合计算平台)(1)
5.11.3 均联智行跨域布局(驾舱融合计算平台)(2)
5.11.4 均联智行跨域布局(驾舱融合计算平台)(3)
5.11.5 均联智行跨域布局(驾舱融合计算平台)(4)
5.11.6 均联智行跨域布局(驾舱融合计算平台)(5)
5.11.7 均联智行跨域布局(软件):基于黑芝麻C1200的CoreFusion舱驾一体软件开放平台(1)
5.11.8 均联智行跨域布局(软件):基于黑芝麻C1200的CoreFusion舱驾一体软件开放平台(2)
5.12 诺博汽车
5.12.1 诺博汽车多域计算产品布局
5.12.2 诺博汽车跨域布局(驾舱融合计算平台)
5.13 华阳通用
5.13.1 华阳通用多域计算产品布局
5.13.2 华阳集团跨域布局(驾舱融合计算单元)(1)
5.13.3 华阳集团跨域布局(驾舱融合计算单元)(2)
5.13.4 华阳集团跨域布局(驾舱融合计算单元)(3)
5.14 远峰科技
5.14.1 远峰科技多域计算产品布局
5.14.2 远峰科技跨域布局(1)
5.14.3 远峰科技跨域布局(2)
5.14.4 远峰科技跨域布局(3)
5.15 北斗星通智联
5.15.1 北斗智联多域计算产品布局
5.15.2 北斗智联跨域布局(1)
5.15.3 北斗智联跨域布局(2)
5.15.4 北斗智联跨域布局(3)
5.15.5 北斗智联跨域布局(4)
5.16 镁佳科技
5.16.1 镁佳科技多域计算产品布局
5.16.2 镁佳科技跨域布局(1)
5.16.3 镁佳科技跨域布局(2)
5.17 诚迈科技
5.17.1 诚迈科技跨域布局(软件):整车操作系统FusionOS
5.17.2 诚迈科技跨域布局(软件):中央控制域软件平台FusionWise3.0
5.17.3 诚迈科技跨域布局(软件):跨域融合整车软件计算平台
5.18 比博斯特
5.18.1 比博斯特跨域布局(智能底盘跨域):搭建完整的技术方案
5.18.2 比博斯特跨域布局(智能底盘跨域):跨域融合集成式线控底盘架构
5.19 百度
5.19.1 百度汽车舱驾一体软芯融合智算平台
5.19.2 百度整车OS一体化供应
06 海外Tier1多域计算技术布局
6.1 博世
6.1.1 博世多域融合计算布局:向着舱驾合一平台演进
6.1.2 博世多域融合计算布局:舱驾合一产品研发路线(1)
6.1.3 博世多域融合计算布局:舱驾合一产品研发路线(2)
6.1.4 博世多域计算产品布局
6.1.5 博世跨域布局(1)
6.1.6 博世跨域布局(2)
6.1.7 博世跨域布局(3)
6.1.8 博世跨域布局(4)
6.1.9 博世跨域布局(5)
6.1.10 博世跨域布局(6)
6.2 大陆
6.2.1 大陆多域融合计算布局:向着四域融合HPC演进
6.2.2 大陆多域计算产品布局
6.2.3 大陆跨域布局(1)
6.2.4 大陆跨域布局(2)
6.2.5 大陆跨域布局(3)
6.2.6 大陆跨域布局(4)
6.2.7 大陆跨域布局(5)
6.3 采埃孚
6.3.1 采埃孚多域融合计算布局
6.3.2 采埃孚跨域布局(1)
6.3.3 采埃孚跨域布局(2)
6.3.4 采埃孚跨域布局(3)
6.4 安波福
6.4.1 安波福多域计算产品布局
6.4.2 安波福跨域布局(1)
6.4.3 安波福跨域布局(2)
6.4.4 安波福跨域布局(3)
6.4.5 安波福跨域布局(4)
6.4.6 安波福跨域布局(5)
6.4.7 安波福跨域布局(6)
6.4.8 安波福多域融合计算产品
6.5 哈曼
6.5.1 哈曼跨域布局:舱驾集成发展规划
6.5.2 哈曼跨域布局:2024年推出多域混合架构
6.5.3 哈曼跨域布局:推出舱驾合一
6.5.4 哈曼跨域布局:舱驾合一底层硬件架构
6.6 伟世通
6.6.1 伟世通多域计算产品布局
6.6.2 伟世通跨域布局(1)
6.6.3 伟世通跨域布局(2)
6.6.4 伟世通跨域布局(3)
6.7 LG电子
6.7.1 G电子跨域布局:与麦格纳合作推出跨域平台(1)
6.7.2 LG电子跨域布局:与麦格纳合作推出跨域平台(2)
6.8 佛瑞亚
6.8.1 佛瑞亚多域计算产品布局
6.8.2 佛瑞亚跨域布局:集成高通8295的舱泊一体域控