近年来,自动驾驶技术的发展路径逐步明朗,行业正加速从L2级别向L2.5/L2.9,甚至L3级别迈进。在这一进程中,推动高速NOA的普及,和城市NOA的快速发展已成为全行业的共识。自2023年下半年以来,城市领航辅助(城市NOA)的市场竞争愈发激烈。各大车企纷纷加速推进城市领航辅助技术的实施进度,并逐步公开其发展规划。进入2023年第三季度以来,乘用车领航辅助驾驶的发展步入了下半场,多家汽车制造商积极布局,利用端到端大模型与无图方案,推动全国智能驾驶进入新的发展阶段。
当前,乘用车NOA面临以下演进趋势:
趋势一 高速领航与城市领航渗透率不断提升
高速领航辅助(高速NOA)自2019年特斯拉首次引入中国,2022年开始快速落地,目前已覆盖国内多家自主、合资品牌。截至2023年底,L2.5级及以上的国内ADAS乘用车销量达到148.4万辆,渗透率为7.1%,其中销量同比增长78.3%。截至2024上半年底,国内乘用车新车L2.5级及以上ADAS车型销量为106万辆,渗透率为11%;其中,高速NOA车型销量为32.8万辆,渗透率为3.4%(不包含既具备高速NOA又具备城市NOA功能的车型)。城市NOA车型销量为73.2万辆,渗透率为7.6%。
国内乘用车高速NOA&城市NOA渗透率(2022-2024H1)
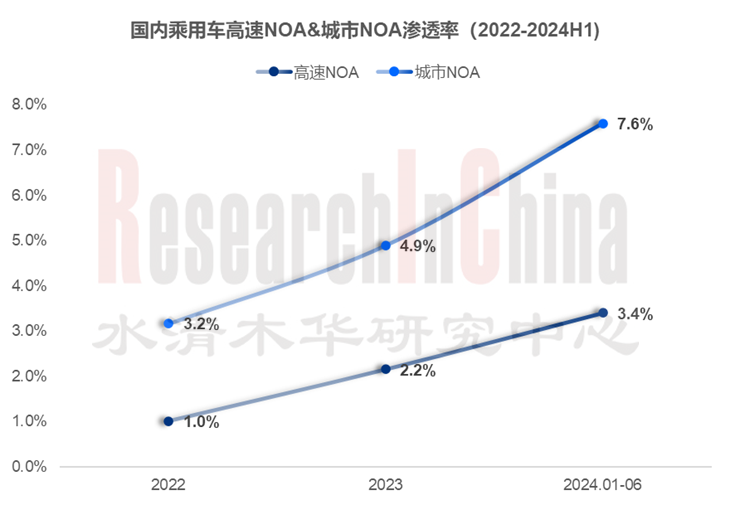
来源:佐思汽研
趋势二 2023~2024年,城市领航辅助进入军备竞赛时刻
在特斯拉、蔚小理、华为系等车企的领衔下,国内各大车企和方案商纷纷向城区领航进发,部分于2023年开始上车,2023~2024年,城市领航辅助进入军备竞赛时刻,多家车企L2.9已成功量产上车。
主机厂加速落地城市领航辅助
.png)
.png)
来源:佐思汽研
趋势三 2023年以来,合资车企加速跟进高速NOA
从主机厂类型来看,2022年,高速NOA企业集中在本土,尚未有外资进入。2023年以来,合资车企开始加速跟进高速NOA,截至2024H1,合资车企高速NOA车型国内销量达到5.4万辆,渗透率为0.6%。2022-2024H1,自主车企高速NOA的车型销量和渗透率持续走高。2023年底,其销量已达到45.4万辆,同比增长124.5%;渗透率达到2.2%,同比增加1.2个百分点。2024H1其销量达到27.5万辆,渗透率为2.8%。
高速NOA渗透率:合资品牌VS.自主品牌(2022-2024H1)
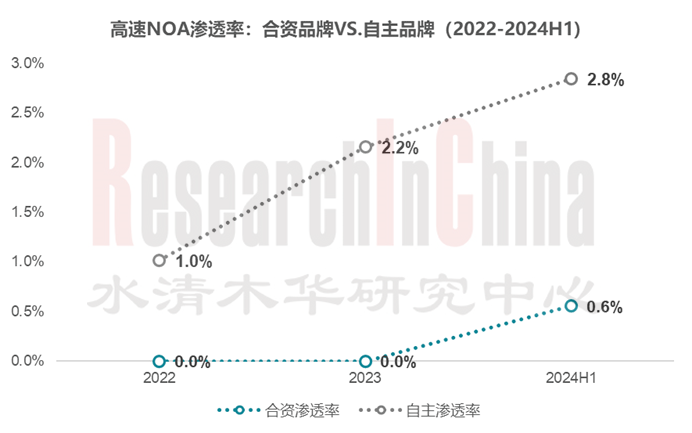
来源:佐思汽研
2023年,合资品牌城市NOA销量为60.4万辆,渗透率为5.9%,同比上升1.8个百分点;自主品牌车型销量为42.3万辆,渗透率为3.9%,同比增长1.8个百分点。2023-2024H1,自主品牌城市NOA车型渗透率进一步加速,截至2024H1,自主品牌城市NOA销量渗透率由2023年底的3.9%增长至8.3%,这一趋势显现出多家自主品牌在智能驾驶领域的快速布局以及国内消费者对于L2.9 ADAS产品力的接受度在不断攀升。
2022-2024H1国内自主/合资品牌乘用车城市NOA车型渗透率
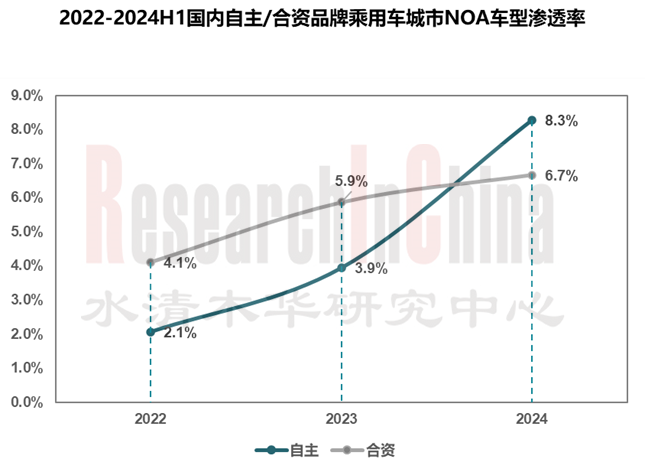
来源:佐思汽研
趋势四 L2.9与L2.5加速渗透至中低端市场,科技平权时代悄然来临
从价格维度分析,城市NOA功能在20-30万元价格区间的车型中增长最为显著。在2024年上半年,尤其是在“20-25万元”这一细分市场,城市NOA的装配量增速最快,科技平权时代已悄然到来。这一趋势表明,2024年,高级驾驶辅助技术正加速渗透至中低端市场,逐渐走向大众化,成为未来日常家用车的标准配置。
2022-2024H1国内乘用车城市NOA车型(分价格区间)销量(万辆)

来源:佐思汽研
在高速NOA领域,L2.5已下探至“10-15”万及“15-20”万两大价格区间的车型。据佐思汽研数据可知,国内乘用车高速NOA车型在“10-15”万及“15-20”万价格区间的渗透率分别由2023年底的0.02%、0.29%增长至2024H1的0.08%和1.39%。以奇瑞集团旗下新能源电动品牌iCAR03家族为例,2024年6月12日,iCAR 03推出了两款全新的智驾版,官方售价为14.98万元和15.98万元,iCAR 03智驾属于L2.5阶段,具备高速NOA功能。
趋势五 城市无图NOA元年已至,众多车企推出去高精地图全国智驾方案
目前,围绕“无图”化技术路线的争论也上升到史无前例的高度,而摆脱高精地图开始成为国内越来越多企业的重点研发方向。在众多国内车企中,目前已采用无图领航辅助驾驶方案的车企包括但不限于:理想、小鹏、华为系、广汽、长城、极氪等,采用轻地图方案的是小米。以华为为例,华为去年12月推出的NCA智驾领航辅助系统无需高精地图,覆盖全国各类公开道路。基于ADS2.0智驾平台,该系统整合了BEV和GOD网络,提升道路解析能力。2024年,华为发布乾崑ADS3.0智驾系统,通过仿生神经网络和AI算法,使驾驶行为更加拟人化。2024年5月,小鹏汽车宣布XNGP城区智驾实现100%无图化,在市县级城市,优先开放核心路段以确保使用体验的连续性。即使在无高精度地图区域,通过“导航地图 + XNet感知能力 + 行驶策略”的组合,XNGP的功能表现接近有图区域。
小鹏城市领航“无图化”发展历程
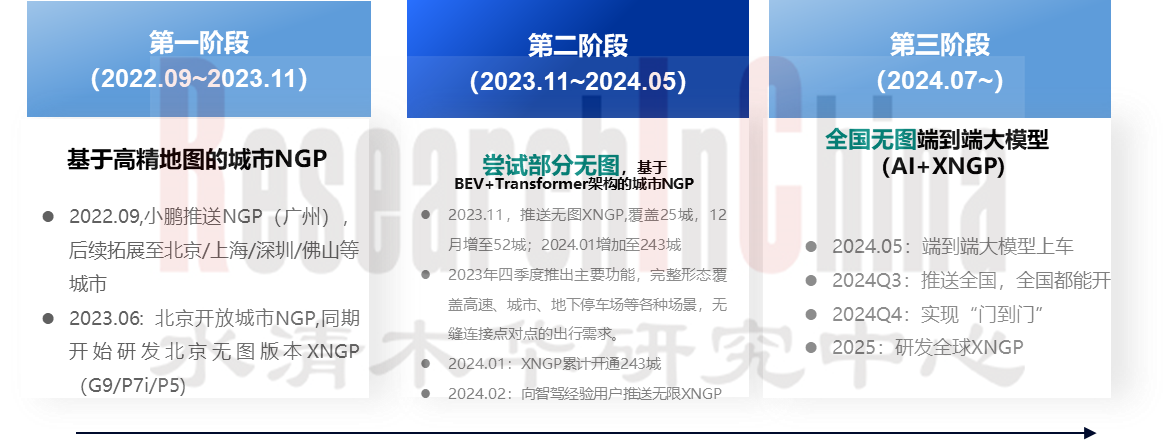
来源:佐思汽研
趋势六 端到端大模型纷纷上车,助力智驾升级
2024年,新势力车企宣布自研大模型开始应用上车,大模型的引入使得系统在处理复杂环境和动态变化时表现得更加精准和高效。通过深度学习和实时数据处理,大模型能够实时解析路况信息,做出智能决策,为驾驶者提供更加安全和可靠的驾驶体验。随着这一方案的推广,自动驾驶系统能够在全国范围内实现更广泛的应用,提升了驾驶的灵活性和适应性。
理想汽车认为,仅依靠One Model端到端还无法实现L4级以上的自动驾驶。理想提出来一个全新的方案:“系统1+系统2”即,E2E(端到端大模型)+VLM(视觉语言模型)。目前系统1处在“第二代:无图、分段式端到端”中,即由两个模型组成,分别是感知和规划。最大的变化是去掉了NPN,不依赖先验信息。这一代技术让理想汽车真正实现了全国都能开、有导航就能开。
趋势七 纯视觉感知路线被更多国内车企视为技术发展新方向之一
在国内智驾技术的演进过程中,上半场的核心技术架构高度依赖激光雷达和高精度地图。这种模式通过复杂的传感器融合技术和地理信息系统的支持,确保了自动驾驶功能的稳定性和安全性,特别是在高精度地图的实时更新和精确匹配方面。
随着智驾竞赛的下半场序幕的拉开,技术路线呈现多元化发展态势,主要可以分为两大类:
第一类技术路线,以华为为代表,采用“激光雷达多融合感知+无图方案/轻量化地图方案+端到端大模型”的策略。在这一框架下,激光雷达提供高精度的感知数据,结合无图或轻量化地图方案,降低了系统对高精度地图的依赖性。同时,端到端大模型的应用,进一步提升了系统的自主学习和决策能力,使得自动驾驶系统在复杂环境中表现更加灵活和可靠。
第二类技术路线,以特斯拉、小鹏、极越等企业为代表,主要采用“纯视觉+无图方案/高精地图+端到端大模型”的技术组合。2024年8月,小鹏正式推出了AI鹰眼视觉方案,这是一个轻雷达(激光雷达在L3中从必选变为可选)的高阶智能驾驶方案。第一款搭载AI鹰眼视觉方案的车型是P7+,将在第四季度正式上市。
小鹏AI鹰眼视觉方案
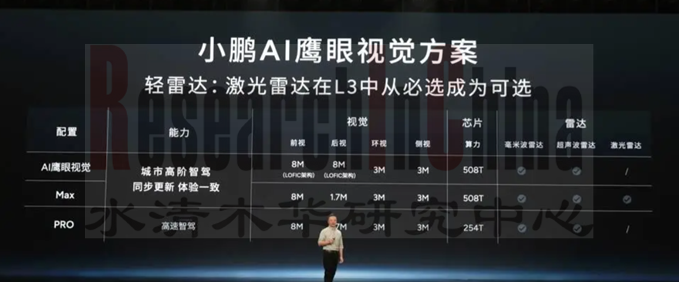
来源:小鹏
01 国内乘用车NOA车型销量及方案
1.1 NOA车型销量及渗透率
1.1.1 2022-2024H1国内乘用车NOA车型销量及渗透率
1.1.2 高速NOA车型销量及渗透率 (分OEM类型)
1.1.3 高速NOA车型销量及渗透率 (分价格区间)
1.1.4 高速NOA车型销量及渗透率 (分汽车品牌)
1.1.5 高速NOA车型销量及渗透率 (分能源类型)
1.1.6 高速NOA车型销量及渗透率 (分车型)
1.1.7 城市NOA车型销量及渗透率 (分OEM类型)
1.1.8 城市NOA车型销量及渗透率 (分价格区间)
1.1.9 城市NOA车型销量及渗透率 (分汽车品牌)
1.1.10 城市NOA车型销量及渗透率 (分能源类型)
1.1.11 城市NOA车型销量及渗透率 (分车型)
1.2 NOA车型传感器方案
1.2.1 2022-2024H1高速NOA车型传感器总体方案
1.2.2 2021-2023年城市NOA车型传感器总体方案
1.2.3 2024.01-2024.07高速NOA车型传感器方案:分汽车品牌/车型
1.3 NOA主要供应商方案
1.3.1 主要国内供应商NOA方案(1)
1.3.1 主要国内供应商NOA方案(2)
1.3.1 主要国内供应商NOA方案(3)
1.3.2 主要国内供应商高速NOA方案对比
1.3.3 主要国内供应商城市NOA方案对比
1.3.4 主要国外供应商NOA方案及在华布局
1.4 NOA主要供应商分析
1.4.1 高速NOA ADAS集成商市场占比分析(2023-2024H1)
1.4.2 高速NOA ADAS软件/算法供应商市场份额解析(2023-2024H1)
1.4.3 城市NOA ADAS集成商市场占比分析(2023-2024H1)
1.4.4 城市NOA ADAS软件/算法及域控供应商市场份额解析(2023-2024H1)
1.4.5 2024H1高速智驾与城市智驾SoC芯片主要供应商
02 乘用车NOA市场趋势及探讨
2.1 ADAS向高阶迈进
2.1.1 L2+以上ADAS渗透率快速提升
2.1.2 主机厂加速落地领航辅助(1)
2.1.2 主机厂加速落地领航辅助(2)
2.1.3 分层推进NOA是当前主流趋势
2.1.4 极致高性价比方案推动L2+成本下探
2.2 高阶智驾从高速卷向城市
2.2.1 城市领航辅助演进方向一
2.2.2 城市领航辅助驾驶演进方向二
2.2.2 “无图”方案决战城市NOA(1)
2.2.2 “无图”方案决战城市NOA(2)
2.2.2 “无图”方案决战城市NOA(3)
2.2.3 “无图”开城案例1:华为
2.2.3 “无图”开城案例2:小鹏
2.2.4 “无图”开城面临的挑战
2.2.5 去/轻高精地图趋势下图商的抉择
2.2.6 城市领航辅助驾驶演进方向三
2.2.7 端到端大模型案例1:理想系统1的迭代演进
2.2.7 端到端大模型案例1:系统1(端到端模型)+ 系统2(VLM)
2.2.7 端到端大模型案例1:理想下一代自动驾驶技术架构
2.2.7 端到端大模型案例1:理想DriveVLM大模型:架构
2.2.7 端到端大模型案例1:理想DriveVLM大模型:渲染效果
2.2.7 端到端大模型案例1:理想DriveVLM大模型-BEV和文本特征的处理
2.2.8 端到端大模型案例2:卓驭实现了中算力平台两段式端到端技术的量产
2.2.9 端到端各家方案对比总结
2.2.10 城市领航辅助驾驶演变趋势四:纯视觉感知成为智能驾驶下半场的新发展方向之一
2.2.11 采用纯视觉感知路线实现城市NOA案例:极越智能驾驶方案演进路线(1)
2.2.11 采用纯视觉感知路线实现城市NOA案例:极越智能驾驶方案演进路线(2)
2.2.12 乘用车领航辅助驾驶演变趋势五:记忆行车(通勤NOA)赛道火爆
2.2.13 记忆行车(通勤NOA)赛道火爆
2.2.13 记忆行车(通勤NOA)赛道火爆
2.2.13 记忆行车(通勤NOA)赛道火爆
2.2.14 记忆行车(通勤NOA)案例:小鹏
2.2.15 记忆行车(通勤NOA)案例:理想
2.2.16 记忆行车(通勤NOA)案例:毫末智行
2.2.17 记忆行车(通勤NOA)案例:大疆
2.2.18 城市领航商业模式尚未统一(1)
2.2.18 城市领航商业模式尚未统一(2)
2.3 NOA推动产业链技术升级
2.3.1 产业链关键技术发展趋势
2.3.2 摄像头向8M方向升级
2.3.3 4D毫米波雷达趋势强化(1)
2.3.3 4D毫米波雷达趋势强化(2)
2.3.4 激光雷达加速上车和迭代(1)
2.3.4 激光雷达加速上车和迭代(2)
2.3.5 大算力需求增长
2.3.6 行泊一体域控助力高阶方案落地(1)
2.3.6 行泊一体域控助力高阶方案落地(2)
2.3.6 行泊一体域控助力高阶方案落地(3)
2.3.7 构建超算中心+数据闭环成为技术升级关键
03 主机厂乘用车NOA方案及应用
3.1 小鹏汽车
3.1.1 小鹏自动驾驶团队发展历程
3.1.2 小鹏汽车自动驾驶演进路线总览
3.1.3 小鹏汽车智驾系统上半场-Xpilot系统升级迭代之路
3.1.4 小鹏汽车智驾系统下半场:XNGP(1)
3.1.4 小鹏汽车智驾系统下半场:XNGP与Xpilot 智驾方案代表车型(2)
3.1.4 小鹏汽车智驾系统下半场:XNGP与Xpilot 智驾方案代表车型(3)
3.1.5 小鹏端到端大模型(1):架构
3.1.5 小鹏端到端大模型(2):智驾模型
3.1.5 小鹏端到端大模型(3):小鹏AI+XNGP
3.1.5 小鹏端到端大模型(4):组织变革
3.2 理想汽车
3.2.1 理想自动驾驶平台演进路线
3.2.2 智驾3.0时代的硬件基础&算法模型
3.2.3 理想智能驾驶团队及产品开发模式
3.2.4 理想ADAS迭代路线(1)
3.2.4 理想ADAS迭代路线(2)
3.2.5 理想NOA迭代历程
3.3 蔚来汽车
3.3.1 蔚来智驾业务布局
3.3.2 蔚来全栈自动驾驶技术
3.3.3 蔚来智驾系统迭代历程
3.3.4 蔚来最新一代智驾系统:NAD
3.3.5 蔚来NOP领航辅助迭代
3.3.6 蔚来高速领航辅助NOP+
3.3.7 蔚来全域领航辅助NOP+
3.3.7 蔚来全域领航辅助NOP+ :通用泛化能力(1)
3.3.7 蔚来全域领航辅助NOP+ :通用泛化能力(2)
3.3.7 蔚来全域领航辅助NOP+ :群体智能系统(1)
3.3.7 蔚来全域领航辅助NOP+ :群体智能系统(2)
3.3.8 蔚来智驾系统OTA动态
3.4 智己汽车
3.4.1 智己汽车智驾业务布局
3.4.2 智己汽车智驾系统及规划
3.4.3 智己最新一代IM AD智驾系统能力(1)
3.4.3 智己最新一代IM AD智驾系统能力(2)
3.4.4 智己NOA发展历程及规划
3.4.5 智己汽车NOA应用案例
3.5 AITO 问界
3.5.1 AITO问界智驾业务布局
3.5.2 AITO问界智驾系统迭代
3.5.3 AITO问界ADS2.0智驾系统
3.5.4 AITO问界ADS2.0 NCA代表车型
3.5.5 AITO问界ADS3.0 NCA代表车型
3.6 比亚迪
3.6.1 比亚迪ADAS团队
3.6.2 比亚迪智驾系统迭代
3.6.3 比亚迪“天神之眼”高阶智驾系统
3.6.4 比亚迪ADAS发展历程
3.6.5 比亚迪ADAS系统落地车型代表1:腾势N7(1)
3.6.5 比亚迪ADAS系统落地车型代表1:腾势N7(2)
3.6.5 比亚迪ADAS系统落地车型代表2:仰望U8
3.6.6 比亚迪高阶智能驾驶技术战略趋势
3.7 广汽
3.7.1 广汽智驾业务发展历程
3.7.2 广汽智驾业务布局:研发与生产
3.7.2 广汽智驾业务布局:投资与合作
3.7.3 广汽智驾系统迭代
3.7.4 广汽ADiGO 4.0智驾系统
3.7.5 广汽NOA代表车型
3.8 吉利汽车
3.8.1 吉利汽车智驾业务布局
3.8.2 吉利ADAS技术布局:吉利星睿智算中心
3.8.3 星睿AI大模型
3.8.4 吉利智能驾驶大模型技术的应用
3.8.5 吉利ADAS发展路线图:自动驾驶&自动泊车
3.8.6 吉利Dirive safe 2.0智驾系统
3.8.7 吉利代表车型案例1:极氪001智能驾驶方案演进路线
3.8.8 吉利代表车型案例2:吉利旗下其它品牌代表车型智驾方案比较
3.9 长安汽车
3.9.1 长安ADAS战略规划
3.9.2 长安ADAS战略:“北斗天枢”战略
3.9.3 长安ADAS功能发展历程
3.9.4 长安智驾技术战略
3.9.5 长安SDA架构
3.9.6 长安四代智驾自研平台迭代之路
3.9.7 长安汽车与华为深化合作,阿维塔深蓝成关键支点
3.9.8 长安ADAS代表车型:L2.9级,长安深蓝SL03 & 阿维塔 12
3.10 零跑
3.10.1 零跑汽车LEAP平台架构(1)
3.10.1 零跑汽车LEAP平台架构(2)
3.10.1 零跑汽车LEAP平台架构(3)
3.10.2 零跑自动驾驶自研情况(1)
3.10.2 零跑自动驾驶自研情况(2)
3.10.3 零跑汽车智能驾驶演进路线(1)
3.10.3 零跑汽车智能驾驶演进路线(2)
3.10.4 零跑汽车智驾系统Leapmotor Pilot
3.11 特斯拉
3.11.1 特斯拉ADAS系统 (1)
3.11.1 特斯拉ADAS系统(2)
3.11.2 特斯拉FSD系统迭代(1)
3.11.2 特斯拉FSD系统迭代(2)
3.11.2 特斯拉FSD系统迭代(3)
3.11.3 特斯拉智驾核心能力:算法(1)
3.11.3 特斯拉智驾核心能力:算法(2)
3.11.3 特斯拉智驾核心能力:算法(3)
3.11.3 特斯拉智驾核心能力:Dojo超算中心 (1)
3.11.3 特斯拉智驾核心能力:Dojo超算中心 (2)
3.11.3 特斯拉智驾核心能力:Dojo超算中心 (3)
3.11.4 特斯拉智驾系统 OTA动态
3.11.5 特斯拉中国布局
04 国内供应商乘用车NOA方案
4.1 德赛西威
4.1.1 德赛西威简介
4.1.2 德赛西威2023年经营情况一览
4.1.3 公司2023年研发投入一览
4.1.4 供应链分布情况及核心客户
4.1.5 德赛西威智能驾驶布局
4.1.6 德赛西威智能驾驶传感器
4.1.7 毫米波雷达产品与技术产品线
4.1.8 德赛西威智能驾驶域控制器(1)
4.1.8 德赛西威智能驾驶域控制器(2)
4.1.9 德赛西威中央计算平台
4.1.10 德赛西威智能驾驶决策层布局
4.1.11 德赛西威智能驾驶解决方案
4.1.12 德赛西威Smart Solution解决方案
4.1.13 德赛西威主要客户
4.2 经纬恒润
4.2.1 经纬恒润简介
4.2.2 2023年经营情况一览
4.2.3 经纬恒润智能驾驶布局
4.2.4 经纬恒润行泊一体产品
4.2.5 经纬恒润行泊一体域控制器ADCU
4.2.6 经纬恒润高性能计算平台HPC
4.2.7 经纬恒润中央计算平台及区域控制器(1)
4.2.7 经纬恒润中央计算平台及区域控制器(2)
4.2.8 经纬恒润智能驾驶软件&算法
4.2.9 经纬恒润ADAS解决方案
4.2.10 经纬恒润合作伙伴
4.3 福瑞泰克
4.3.1 公司简介
4.3.2 福瑞泰克核心智驾能力(1)
4.3.2 福瑞泰克核心智驾能力(2)
4.3.2 福瑞泰克核心智驾能力(3)
4.3.2 福瑞泰克核心智驾能力(4)
4.3.3 福瑞泰克智驾解决方案路线图(1)
4.3.3 福瑞泰克智驾解决方案路线图(2)
4.3.4 福瑞泰克L2 行泊一体方案
4.3.5 福瑞泰克L2+ 行泊一体方案
4.3.6 福瑞泰克L2.5 行泊一体方案
4.3.7 福瑞泰克L2.9 行泊一体方案
4.3.8 福瑞泰克L3/L3+ 行泊一体方案
4.3.9 福瑞泰克智能驾驶合作伙伴
4.3.10 福瑞泰克发展动态
4.4 华为
4.4.1 华为简介
4.4.2 华为智能汽车解决方案BU业务(1)
4.4.2 华为智能汽车解决方案BU业务(2)
4.4.3 ADS全栈解决方案
4.4.4 ADS2.0
4.4.5 ADS2.0和ADS1.0的差别:传感器方面
4.4.6 ADS1.0与2.0解决方案对比(1)
4.4.6 ADS1.0与2.0解决方案对比(2)
4.4.7 华为ADS 2.0算法
4.4.8 华为ADS 2.0进展
4.4.9 ADS2.0:智能泊车能力
4.4.10 ADS2.0:障碍物识别能力
4.4.11 华为ADS 2.0系统特点(1)
4.4.11 华为ADS 2.0系统特点(2)
4.4.11 华为ADS 2.0系统特点(3)
4.4.11 华为ADS 2.0系统特点(4)
4.4.12 华为ADS 3.0(1)
4.4.12 华为ADS 3.0(2):端到端
4.4.12 华为ADS 3.0(3):ASD3.0 VS. ASD2.0
4.4.13 ADS 3.0落地案例(1):享界S9
4.4.13 ADS 3.0落地案例(2):智界R7
4.5 百度Apollo
4.5.1 百度Apollo简介
4.5.2 百度在智能驾驶领域的战略布局
4.5.3 百度Apollo商业模式(1)
4.5.3 百度Apollo商业模式(2)
4.5.4 百度Apollo智能驾驶技术
4.5.5 百度Apollo智能化产品矩阵布局
4.5.6 百度Apollo ACU计算平台
4.5.7 百度Apollo 算法+芯片布局(1)
4.5.7 百度Apollo 算法+芯片布局(2)
4.5.7 百度Apollo 算法+芯片布局(3)
4.5.7 百度Apollo 算法+芯片布局(4)
4.5.7 百度Apollo 算法+芯片布局(5)
4.5.7 百度Apollo 算法+芯片布局(6)
4.5.7 百度Apollo 算法+芯片布局(7)
4.5.7 百度Apollo 算法+芯片布局(8)
4.5.8 百度Apollo智驾解决方案
4.5.9 百度Apollo城区领航辅助 City Driving Max (1)
4.5.9 百度Apollo城区领航辅助 City Driving Max (2)
4.5.10 百度Apollo城区领航辅助-ASD
4.5.11 百度Apollo智能驾驶硬件配置方案—感知
4.5.12 百度L4商业落地进展(1)
4.5.12 百度L4商业落地进展(2)
4.5.13 百度Apollo智驾业务合作伙伴
4.6 卓驭科技(原大疆车载)
4.6.1 卓驭科技 简介
4.6.2 卓驭科技研发与生产
4.6.3 卓驭科技智能驾驶业务发展历程
4.6.4 卓驭科技全场景智能驾驶解决方案
4.6.5 卓驭科技灵犀智驾技术迭代
4.6.6 卓驭科技灵犀智驾系统2.0
4.6.6 卓驭科技灵犀智驾系统2.0:核心能力(1)
4.6.6 卓驭科技灵犀智驾系统2.0:核心能力(2)
4.6.6 卓驭科技灵犀智驾系统2.0:核心能力(3)
4.6.6 卓驭科技灵犀智驾系统2.0:核心能力(4)
4.6.6 卓驭科技灵犀智驾系统2.0:主要功能
4.6.7 卓驭科技高阶智驾系统部署策略
4.6.8 卓驭科技L2 方案应用案例
4.6.9 卓驭科技L2+方案应用案例(1)
4.6.9 卓驭科技L2+方案应用案例(2)
4.6.10 卓驭科技合作伙伴及动态
4.7 毫末智行
4.7.1 毫末智行简介
4.7.2 毫末智行商业模式
4.7.3 毫末智行主要业务
4.7.4 毫末智行HPilot系统迭代图
4.7.5 毫末智行第一代HPilot系统 (1)
4.7.5 毫末智行第一代HPilot系统 (2)
4.7.5 毫末智行第一代HPilot系统:HP350方案
4.7.5 毫末智行第一代HPilot系统:HP550方案
4.7.6 毫末智行第二代HPilot系统
4.7.7 毫末智行智能驾驶落地车型
4.7.8 毫末智行客户及合作伙伴
4.8 Momenta
4.8.1 Momenta公司简介
4.8.2 Momenta 自动驾驶战略
4.8.3 Momenta L2+级自动驾驶解决方案:Mpilot(1)
4.8.3 Momenta L2+级自动驾驶解决方案:Mpilot(2)
4.8.4 Momenta 推出基于英伟达芯片的高阶智能驾驶解决方案
4.8.5 Momenta 无图智驾方案
4.8.5 Momenta 无图智驾方案
4.8.6 Momenta近期合作动态
4.9 易航智能
4.9.1 公司简介
4.9.2 易航智能业务模式
4.9.3 自动驾驶解决方案
4.9.3 L2.5 解决方案1:行泊一体Lite版(单SoC)
4.9.3 L2.5 解决方案2:行泊一体Lite版(单SoC)
4.9.4 L2.5 解决方案1:行泊一体旗舰版(双SoC)
4.9.4 L2.5 解决方案2:行泊一体旗舰版(双SoC)
4.9.4 L2.5 解决方案3:行泊一体旗舰版(双SoC)
4.9.5 全场景自动驾驶FSD解决方案:双Orin-X/双J5
4.9.5 全场景自动驾驶解决方案:双Orin-X/双J5
4.9.6 合作伙伴及动态
4.10 宏景智驾
4.10.1 宏景智驾简介
4.10.2 公司发展历程与爆款量产车型
4.10.3 宏景智驾业务布局
4.10.4 宏景智驾商业模式
4.10.5 宏景产品路线规划图
4.10.6 宏景智驾摄像头一体机方案:IPM1.0-J2&J3一体机
4.10.7 宏景智驾域控制器:HDC 1.0 - 单J3域控
4.10.8 宏景智驾软件算法平台(1)
4.10.8 宏景智驾软件算法平台(2)
4.10.9 宏景智驾智能驾驶解决方案
4.10.10 宏景智驾轻量级行泊一体方案
4.10.11 宏景智驾高阶智驾系统方案
4.10.12 主要合作伙伴
4.11 四维图新
4.11.1 四维图新公司简介
4.11.2 四维图新经营业绩
4.11.3 四维图新智驾方案(1)
4.11.3 四维图新智驾方案(2)
4.11.4 四维图新行泊一体方案 (L2.5)(1)
4.11.4 四维图新行泊一体方案 (L2.5)(2)
4.11.5 四维图新合作伙伴及动态
4.12 商汤科技
4.12.1 公司简介
4.12.2 商汤绝影智能驾驶解决方案
4.12.3 商汤绝影L2智驾解决方案
4.12.4 商汤绝影L2.5智驾解决方案
4.12.5 商汤绝影L2.9智驾解决方案
4.12.6 商汤绝影智驾能力 (1)
4.12.6 商汤绝影智驾能力 (2)
4.12.7 商汤汽车合作伙伴
4.13 地平线
4.13.1 地平线智能驾驶布局重要节点
4.13.2 地平线计算平台——Matrix® 2
4.13.2 地平线计算平台——Matrix® 5
4.13.3 地平线自动驾驶产品及解决方案
4.13.4 地平线L2+解决方案:Horizon Matrix Mono
4.13.5 地平线L2.5解决方案:Horizon Matrix Pilot 3(1)
4.13.5 地平线L2.5解决方案:Horizon Matrix Pilot 3(2)
4.13.6 Horizon Matrix® SuperDrive(1)
4.13.6 Horizon Matrix® SuperDrive(2)
4.13.7 全场景智能驾驶解决方案SuperDrive2.0
4.14 东软睿驰
4.14.1 东软睿驰简介
4.14.2 东软睿驰自动驾驶产品矩阵
4.14.3 智驾解决方案
4.14.4 东软睿驰L2++智驾解决方案
4.14.5 东软睿驰中央计算平台 (1)
4.14.5 东软睿驰中央计算平台 (2)
4.14.6 东软睿驰智驾核心能力(1)
4.14.6 东软睿驰智驾核心能力(2)
4.14.6 东软睿驰智驾核心能力(3)
4.15 智驾科技
4.15.1 公司简介
4.15.2 MAXIEYE智能驾驶业务及规划
4.15.3 MAXIEYE智能驾驶解决方案
4.15.4 MAXIEYE L2 智驾系统(1)
4.15.4 MAXIEYE L2 智驾系统(2)
4.15.5 MAXIEYE L2.5智驾系统(1)
4.15.5 MAXIEYE L2.5智驾系统(2)
4.15.5 MAXIEYE L2.5智驾系统(3)
4.15.6 MAXIEYE 高阶智驾系统核心能力
4.15.7 MAXIEYE自动驾驶合作动态
4.16 知行科技
4.16.1 知行科技简介
4.16.2 知行科技2023年经营情况一览
4.16.3 知行科技的业务模式(1)
4.16.3 知行科技的业务模式(2)
4.16.4 产品战略路线规划
4.16.5 知行科技摄像头产品
4.16.6 知行科技域控制器产品(1)
4.16.6 知行科技域控制器产品(2)
4.16.7 知行科技智能驾驶解决方案(1)
4.16.7 知行科技智能驾驶解决方案(2)
4.16.8 知行科技主要合作伙伴
4.17 纽劢科技
4.17.1 公司简介
4.17.2 智驾产品发展线路图
4.17.3 纽劢科技主要产品
4.17.4 纽劢科技MaxDrive 智驾解决方案
4.17.5 纽劢科技智驾核心能力(1)
4.17.5 纽劢科技智驾核心能力(2)
4.17.5 纽劢科技智驾核心能力(3)
4.17.6 合作伙伴及动态
4.18 纵目科技
4.18.1 纵目科技公司介绍
4.18.2 2023公司经营情况一览
4.18.3 公司战略布局
4.18.4 公司在智能驾驶领域布局
4.18.5 纵目科技智能驾驶解决方案
4.18.6 纵目科技解决方案1:Amphiman 3000(1)
4.18.6 纵目科技解决方案1:Amphiman 3000(2)
4.18.6 纵目科技解决方案1:Amphiman 3000(3)
4.18.7 纵目科技解决方案2:Amphiman 5000
4.18.8 纵目科技解决方案3:Amphiman 8000
4.18.9 纵目科技解决方案4:舱行泊一体
4.18.10 纵目科技解决方案5:Drop’nGo
4.18.11 近期动态及合作伙伴
4.19 AutoBrain
4.19.1 公司简介
4.19.2 AutoBrain智驾产品及解决方案
4.19.3 AutoBrainL2.5智驾方案
4.19.4 Autobrain智驾核心能力(1)
4.19.4 Autobrain智驾核心能力(2)
4.19.5 合作伙伴及动态
4.20 轻舟智航
4.20.1 轻舟智航简介
4.20.2 轻舟智航“双擎战略”
4.20.3 轻舟智航在智能驾驶领域的产品矩阵
4.20.4 轻舟智航Robobus布局
4.20.5 轻舟智航中高阶智驾产品及方案-基于征程®6 (1)
4.20.5 轻舟智航中高阶智驾产品及方案-基于征程®6 (2)
4.20.6 轻舟智航中高阶智驾产品及方案-基于征程®5 (1)
4.20.6 轻舟智航中高阶智驾产品及方案-基于征程®5 (2)
4.20.7 轻舟智航核心智驾技术(1)
4.20.7 轻舟智航核心智驾技术(2)
4.20.8 轻舟智航合作伙伴
4.21 元戎启行
4.21.1 元戎启行简介
4.21.2 元戎启行业务布局
4.21.3 元戎启行高阶智驾解决方案
4.21.4 元戎启行L2++高阶智驾解决方案(1)
4.21.4 元戎启行L2++高阶智驾解决方案(2)
4.21.5 元戎启行高阶智驾核心技术
4.21.6 元戎启行合作伙伴及动态
4.22 小马智行
4.22.1 小马智行简介
4.22.2 小马智行发展历程
4.22.3 小马智行商业模式分析
4.22.4 小马智行乘用车智驾解决方案:小马识途
4.22.5 小马智行乘用车智驾解决方案:方载
4.22.6 小马智行乘用车智驾解决方案:苍穹
4.22.7 小马智行L2.5 智驾解决方案(1)
4.22.7 小马智行L2.5 智驾解决方案(2)
4.22.8 小马智行L4商业落地进展
05 国外供应商乘用车NOA方案
5.1 博世
5.1.1 博世公司简介
5.1.2 2023年博世集团经营情况一览
5.1.3 博世中国战略布局(1)
5.1.3 博世中国战略布局(2)
5.1.3 博世中国战略布局(3)
5.1.3 博世中国战略布局(4)
5.1.3 博世中国战略布局(5)
5.1.3 博世中国战略布局(6)
5.1.4 博世自动驾驶产品矩阵
5.1.5 博世智驾解决方案及规划
5.1.6 博世高阶智驾系统(L2++)软硬件
5.2 大陆
5.2.1 大陆公司简介
5.2.2 2023年大陆集团经营情况一览
5.2.3 大陆集团中国布局(1)
5.2.4 大陆全栈智驾方案规划图
5.2.5 大陆智驾解决方案及规划
5.2.6 大陆在华智驾业务布局
5.2.7 大陆集团中国布局
5.3 采埃孚
5.3.1 采埃孚公司简介
5.3.2 2023年采埃孚经营情况一览
5.3.3 采埃孚自动驾驶战略分析(1)
5.3.3 采埃孚自动驾驶战略分析(2):推出中国版“采睿星”
5.3.3 采埃孚自动驾驶战略分析(3):自动泊车
5.3.4 采埃孚L2++智驾解决方案
5.4 安波福
5.4.1 安波福公司简介
5.4.2 2023年安波福经营情况一览
5.4.3 安波福在自动驾驶领域的布局
5.4.4 安波福中国战略总体布局(1)
5.4.5 安波福中国产品布局(1)
5.4.5 安波福中国产品布局(2)
5.4.6 安波福决策类产品-域控制器/多域计算平台
5.4.7 安波福解决方案-行泊一体(1)
5.4.7 安波福解决方案-行泊一体(2)
5.5 Mobileye
5.5.1 公司简介
5.5.2 主要产品及业务
5.5.3 智驾产品路线
5.5.4 智能驾驶解决方案
5.5.5 L2+级自动驾驶解决方案:SuperVision
5.5.6 L3/ L4级自动驾驶解决方案 :Chauffeur方案
5.5.7 智能驾驶核心技术
5.5.7 智能驾驶核心技术:EyeQ芯片
5.5.7 智能驾驶核心技术:REM(路网信息管理--视觉众包高精地图绘制)
5.5.7 智能驾驶核心技术:真正冗余(TR)
5.5.7 智能驾驶核心技术:视觉和雷达算法(1)
5.5.7 智能驾驶核心技术:视觉和雷达算法(2)
5.5.7 智能驾驶核心技术:RSS(责任敏感安全模型)
5.5.7 智能驾驶核心技术:EyeQ kit工具包
5.5.8 客户及合作伙伴