一、布局具身智能:主机厂与供应商的多元路径
在具身智能浪潮下,汽车产业链的主机厂和供应商纷纷入局,积极探索适合自身的发展策略。当下,布局方式主要分为自研、合作研发、投资以及合作探索应用这几类,每种方式都各有优劣,企业需依据自身资源、技术实力和市场目标来抉择。
简单来说,具身智能(Embodied Artificial Intelligence, EAI)是一种基于物理身体进行感知和行动的智能体(Agent),它就像赋予机器人一个能与环境交互的 “身体”,使其能像人类一样通过观察、移动、说话来学习和执行任务 。这一概念的兴起,为汽车产业带来了前所未有的机遇与挑战。
(一)技术发展一脉相承,车企加速部署人形机器人:
车企布局具身智能的核心逻辑在于技术复用、供应链协同、市场增量挖掘。同时,智能驾驶技术(如感知算法、决策模型)与具身智能高度同源,车企可将自动驾驶积累的AI能力迁移至机器人开发,降低研发成本。未来,随着硬件成本下降与大模型能力提升,具身智能将从工业场景逐步渗透至消费领域,成为车企智能化转型的关键支柱。
主机厂具身智能赛道布局情况
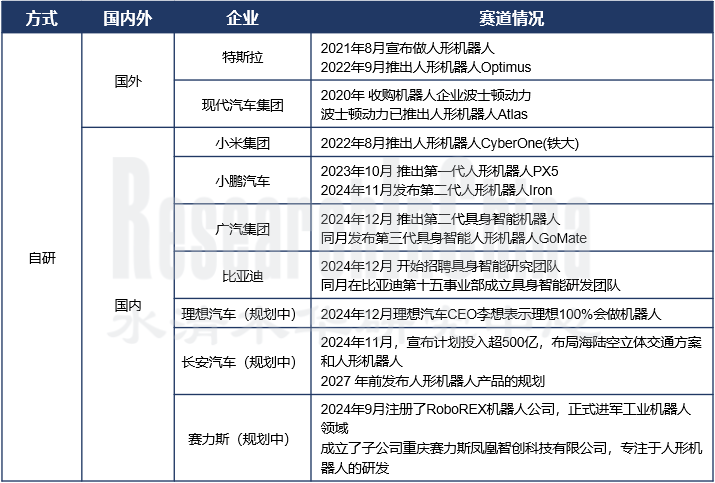
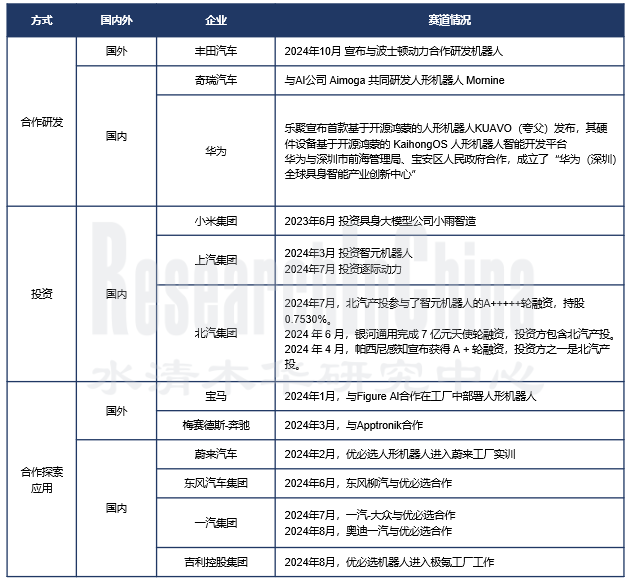
来源:佐思汽研《2024-2025年主机厂与供应商布局具身智能(及AI机器人)的趋势分析报告》
2024年11月6日,小鹏汽车“AI科技日”上,小鹏汽车亮相了全新一代人形机器人“Iron艾伦”,该款人形机器人已经进入小鹏汽车广州工厂进行了小鹏P7+车型的生产实训,未来将会聚焦在工厂和线下门店等场景。
• Iron采用仿人结构设计,身高178cm,体重70kg,采用1:1人类双手尺寸设计,拥有15个自由度,支持触觉反馈;它拥有超过60个关节,可以模拟人类的多种动作,如站立、躺卧、坐等;
• Iron搭载了小鹏 AI 鹰眼视觉系统,实现了720°无死角的环境感知能力,还运用了端到端大模型和强化学习算法
• 搭载与小鹏汽车同款的小鹏天玑AIOS系统,给机器人流畅自由对话的能力,有记忆、能推
• 采用了一款名为图灵AI芯片的核心技术,该芯片专为大模型定制,拥有40核处理器,算力为3000T,这款芯片是首颗可同时应用于AI汽车、AI机器人和飞行汽车的芯片。

来源:小鹏汽车
(二)供应商全面发力,深度布局具身智能产业链
汽车供应商依托既有硬件技术(如传感器、芯片、电机)和供应链资源,向具身智能领域延伸,核心逻辑在于技术复用与协同降本。例如,激光雷达厂商速腾聚创将车载感知方案适配至机器人,实现环境建模能力的迁移;电机企业复用汽车动力总成技术开发高密度关节驱动模块。其优势在于成熟的制造经验和客户网络,但需应对机器人场景对硬件灵活性的严苛要求。
供应商具身智能赛道布局情况

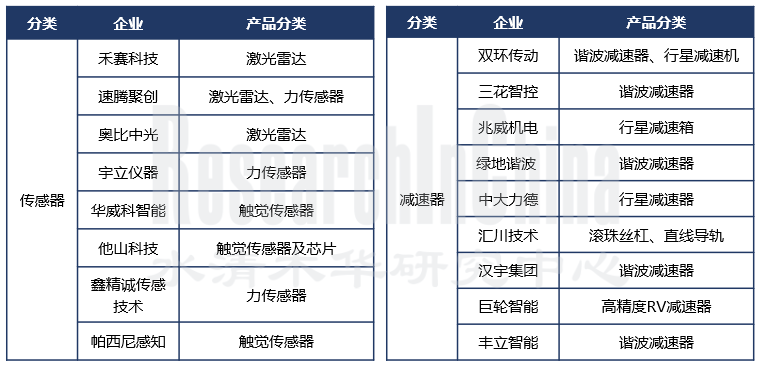
来源:佐思汽研《2024-2025年主机厂与供应商布局具身智能(及AI机器人)的趋势分析报告》
2025年1月3日,RoboSense速腾聚创“Hello Robot”2025 AI机器人全球线上发布会,首次全面呈现了RoboSense速腾聚创的机器人技术平台公司战略,并发布了多款数字化激光雷达,推出机器人视觉产品,以及一系列面向机器人的增量零部件及解决方案。
在发布会上,速腾聚创推出具有20自由度的第二代灵巧手,最大负载5千克,在指尖指腹和手掌上共有14个力传感器,配合机械臂及其控制系统,可灵活复刻人手的精细动作和操作,例如精细地拿起鸡蛋、捡起螺丝钉等。
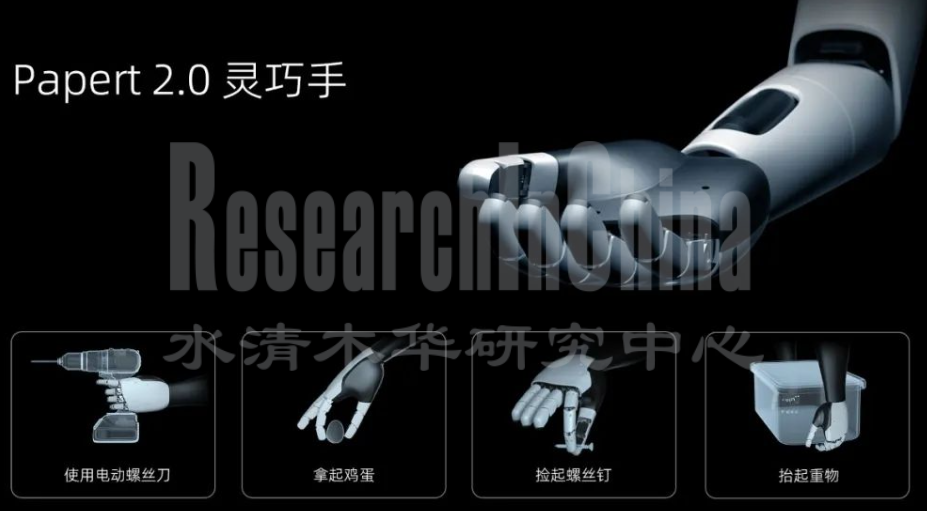
来源:速腾聚创
此外,速腾聚创首次展示了自研的人形机器人整机,该机被定义为机器人通用零部件开发平台,是各项机器人增量零部件及解决方案的研发“母机”。立足于整机,速腾聚创将聚焦于机器人的视觉、触觉、关节三类增量零部件领域,为机器人行业赋能。此次速腾聚创还公布了适用于足式机器人的末端运动控制的力传感器FS-3D、高功率密度直线电机LA-8000和高集成化、小体积、大算力、低功耗的机器人域控制器DC-G1等产品。
速腾聚创机器人增量零部件
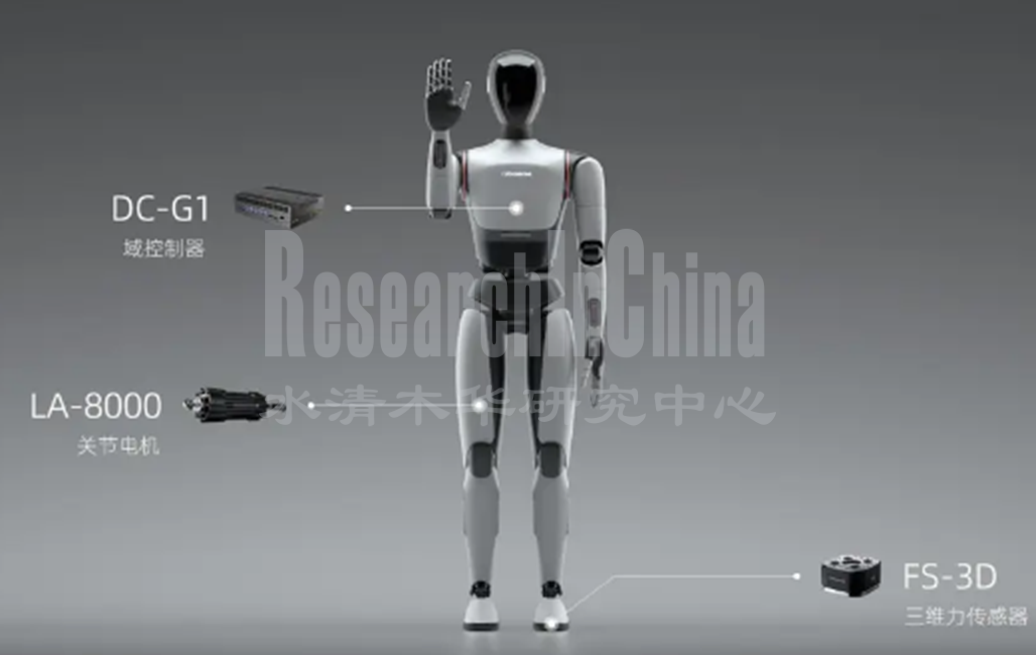
图片来源:速腾聚创
(三)自动驾驶领域技术人才入局具身智能
从业者转型的核心驱动力是技术路径趋同与行业红利转移。自动驾驶行业L4商业化遇阻后,资本与人才向具身智能倾斜,而两者在感知算法、决策模型(端到端强化学习)上高度重叠,算法经验可直接迁移。从业者优势在于AI算法积累和快速迭代能力,但需补足机械控制(如力反馈、运动规划)等硬件交互知识,且面临技术路线不确定性与商业化验证风险。其目标是通过软硬件协同创新,抢占具身智能早期技术制高点。
智能驾驶从业人员转型具身智能赛道情况

来源:佐思汽研《2024-2025年主机厂与供应商布局具身智能(及AI机器人)的趋势分析报告》
2023年11月,文远知行前COO张力宣布加入逐际动力(LimX Dynamics),担任首席运营官(COO)。张力在自动驾驶领域拥有丰富的经验,曾领导文远知行在RoboTaxi商业化落地和技术研发方面取得显著成绩。他的加入标志着逐际动力在具身智能领域的进一步发力,也反映了自动驾驶与具身智能两大前沿技术领域的深度融合趋势。
2024年10月逐际动力推出“三合一” 模块化足端设计多形态双足机器人TRON 1,专为复杂环境下的移动与操作任务设计。TRON1采用了先进的运动控制算法和高精度传感器融合技术,能够在非结构化地形(如楼梯、碎石路)中稳定行走,并完成爬坡、越障等高难度动作。其模块化设计允许用户根据任务需求灵活配置功能模块,例如搭载机械臂进行抓取操作,或集成视觉传感器用于环境感知与导航。TRON1的核心优势在于其高度灵活的运动能力和强大的环境适应性,使其在工业巡检、应急救援、物流配送等领域具有广泛的应用潜力。
多形态双足机器人TRON 1
来源:逐际动力
二、机器人与汽车产业:异同交织下的协同发展
(一)产业相通性:技术与供应链的协同基础
硬件层面:机器人和汽车产业在硬件零部件方面存在着高度的相通性。电机、传感器、减速 / 转换机构、电池、轴承、结构件、冷却系统、控制器、芯片等硬件,在两个产业中都有着广泛的应用。以特斯拉 Optimus 为例,其在设计中大量借鉴了汽车的硬件技术。
• 以特斯拉为例,Optimus每个(共14个)旋转关节使用2个角接触球轴承、1个交叉滚子轴承;每个(共14个)线性关节使用1个四点接触轴承、1个滚珠轴承。这4种轴承在汽车产业已经广泛使用。
Optimus旋转执行器
图片来源:特斯拉
传感器方面:激光雷达、摄像头、毫米波雷达等在汽车自动驾驶和机器人导航中都起着关键作用。汽车借助激光雷达精准探测前方障碍物、识别道路边界,实现自动驾驶;AI机器人则依靠激光雷达扫描周边环境,灵活避障、精准导航。此外,控制器作为 “智慧大脑”,汽车的电子控制单元(ECU)和机器人的运动控制器在底层逻辑上殊途同归,都是接收传感器信号,依据预设算法迅速运算,向执行器下达指令 。
• 小鹏Iron人形机器人使用的鹰眼视觉系统具体技术细节主要依赖于小鹏的智驾体系,该系统结合了端到端大模型和强化学习算法。这种视觉系统使得Iron能够在720°范围内无死角地观察周围环境。
小鹏AI鹰眼视觉系统
来源:小鹏汽车
软件技术:车企在自动驾驶领域积累的算法能力为具身智能的发展提供了宝贵的经验。人形机器人自主处理任务和汽车自动驾驶的本质都是 “感知 — 决策 — 执行” 的过程,两者在模型层面存在一定互通性。在路径规划、运动轨迹预测等关键算法上,智能驾驶的算法能够复用于人形机器人 。
• 例如,特斯拉将 FSD 自动驾驶系统中的视觉、导航和 AI 算法技术应用于 Optimus,使其具备了环境感知和自主决策能力。受益于Dojo计算机等特斯拉日益强大的AI训练能力和自动驾驶场景模拟系统,特斯拉机器人在出厂前就将具备对环境路径、周围物体的识别和路径规划能力。
供应链:汽车供应链的成熟经验也为机器人产业的发展提供了有力支持。机器人产业链与汽车供应链在部分零部件技术上同源,如电池、电机、轴承等产品在车端和机器人端差异较小。车端供应链经过长期发展,具备大规模自动化生产经验,能够帮助机器人实现量产降本 。
(二)产业差异性:市场需求与技术重点的差异
供应链—零部件定制化程度:
• 汽车:汽车零部件虽种类繁多,但由于汽车标准化生产程度高,许多零部件通用性较强,可大规模生产以降低成本。
• 机器人:具身智能产品应用场景多样,形态和功能差异大,导致零部件定制化程度高。如用于医疗手术的机器人与家庭清洁机器人,其关节结构、传感器配置等零部件因功能需求不同而有很大差异,难以实现大规模标准化生产
供应链—响应速度:
• 汽车:汽车生产周期较长,从设计到量产可能需要数年时间,供应链相对稳定,对响应速度要求并非极短周期。汽车制造商通常会提前规划生产计划,与供应商签订长期合同,确保零部件稳定供应。
• 机器人:市场需求变化快,技术更新迭代迅速,要求供应链具备更快的响应速度。如消费级的智能机器人,一旦市场出现新的功能需求或技术突破,制造商需迅速调整产品设计
硬件技术—集成度与复杂度:
• 汽车:汽车是一个高度集成的复杂系统,众多硬件组件紧密协作。发动机/电机系统、电驱系统、电池系统、变速器、底盘、电气系统等,每个子系统都有其复杂的设计和功能,且需相互适配。
• 机器人:虽然也涉及多硬件协同,但集成方式和重点不同。具身智能产品可能更侧重于特定功能模块的集成,如机器人关节模块集成电机、传感器与控制器。
硬件技术—能源存储:
• 汽车:新能源汽车以动力电池为主要能源存储设备,如锂离子电池。其电池容量需求大,通常以千瓦时(kWh)为单位计量,目的是支撑车辆实现较长的续航里程,一般在几百公里左右。
• 机器人:能源存储硬件多样且灵活,依据产品功能和应用场景选择。与新能源汽车相比,具身智能产品能源存储硬件更注重小型化、轻量化以及对不同任务场景的适配性,而非单纯追求高续航里程。
软件技术—算法与数据处理:
• 汽车:在自动驾驶领域,算法侧重于环境感知与决策规划,如目标检测与识别算法用于识别道路上的车辆、行人等,路径规划算法根据感知信息规划安全行驶路径。数据处理主要围绕车载传感器收集的路况信息,数据量巨大但类型相对固定。
• 机器人:算法涵盖更广泛领域,除环境感知与运动规划外,还包括自然语言处理、情感识别等交互算法。数据来源多样,不仅有传感器数据,还可能涉及用户交互数据、云端数据等。
三、布局之路:主机厂与供应商的关键考量
技术研发与创新:
• 加大在具身智能核心技术上的投入,如大模型、传感器融合、运动控制、人机交互等领域。像特斯拉在 Optimus 的研发中,不断优化 FSD 技术迁移后的效果,提升机器人的感知和决策能力;华为持续迭代盘古具身智能大模型,增强其任务规划和多场景泛化能力。
• 车企与供应商在布局具身智能领域时,应避免“重复造轮子”的研发方式,汽车产业与机器人产业在诸多层面存在显著的通用性。在供应链方面,二者所需的原材料与零部件供应渠道多有重合,整合供应链资源可大幅降低采购成本与管理难度。软件技术层面,AI大模型与深度学习算法是具身智能实现的核心驱动力,共享这些技术成果能加速研发进程。硬件技术上,传感器用于感知环境,电机、齿轮、轴承等负责动力传输与机械运动,二者高度相似 ,统一技术标准和研发方案,可减少重复研发投入。
市场需求与应用场景拓展:
• 具身智能作为新兴领域,市场需求和应用场景仍在不断探索和拓展。企业应加强市场调研,深入了解不同行业和用户的需求特点,针对性地开发产品和解决方案。积极与潜在客户合作,开展试点项目和应用示范,积累市场经验,提高产品的市场适应性和竞争力 。
• 除了常见的工业制造、物流仓储、家庭服务等场景,积极探索具身智能在医疗、教育、农业等领域的应用潜力。比如,研发用于医疗康复的辅助机器人、教育陪伴的智能机器人、农业生产的采摘和耕种机器人等。通过拓展应用场景,扩大市场份额,降低对单一市场的依赖。
人才培养与引进:
• 具身智能涉及多学科领域,主机厂和供应商需要招聘和培养具备跨学科知识和技能的人才。例如,吉利、比亚迪、华为等企业在2024年底成立专门的具身智能研究团队,且在招聘相关岗位时,明确要求候选人具备机械、自动化、力学、计算机、数学、电子信息和计算等多个领域的知识背景。企业还可以通过内部培训、高校合作等方式,提升现有员工的跨学科能力,打造一支专业的人才团队。
第一章 具身智能基本概述
1.1 具身智能术语
具身智能名词解释(1)
具身智能名词解释(2)
1.2 政策
政策大力支持下,各地建立创新中心,布局AI机器人产业集群
国家层面人形机器人相关政策/计划(2021年-2024年)
国家顶层设计发布,支持人形机器人产业发展
1.3 具身智能综述
具身智能基本概念(1)
具身智能基本概念(2)
具身智能发展演进历程
具身智能产业发展现状
具身智能应用场景演进
产业入局和技术成熟,海内外人形机器人产业均进入发展的快车道
1.4 AI 人形机器人综述
AI人形机器人定义
AI人形机器人主要构成
AI大模型赋能人形机器人技术路径
人形机器人智能化分级
AI大模型赋能人形机器人技术路径一案例(1)
AI大模型赋能人形机器人技术路径一案例(2)
AI大模型赋能人形机器人技术路径二案例
AI大模型赋能人形机器人技术路径二案例
AI大模型其他应用-LLM赋能AI人形机器人赋能机械臂规划控制
AI人形机器人应用场景
AI人形机器人产业链
1.5 汽车和机器人产业共性和差异
智能汽车和机器人硬件零部件上的相通性
智能汽车和机器人软件技术层面上的相通性
智能汽车和机器人供应链体系及生产环节上的相通性
小鹏/特斯拉人形机器人与智能汽车相通技术
智能汽车与具身智能产业的差异性(1)
智能汽车与具身智能产业的差异性(2)
1.6 具身智能团队建设
国内车企具身智能团队构建(1)
国内车企具身智能团队构建(2)
国内车企具身智能团队构建(3)
国内车企具身智能团队构建(4)
国内车企具身智能团队构建(5)
国内车企具身智能团队构建(6)
第二章 具身智能技术概览
2.1 具身智能技术体系
具身智能实现过程中的三大核心环节
多模态大模型驱动具身感知到具身认知
具身想象:仿真引擎里想象感知后的物体与任务如何执行
具身执行:将具身想象中生成的方案转化为实际操作的过程
具身智能本身可以被看作是一个与环境交互的“智能体(AI Agent)”
具身智能的学习方式与传统智能有较大差别
具身智能组成的四大核心要素(1)
具身智能组成的四大核心要素(2)
具身智能技术体系
具身智能技术体系—感知模块
具身智能技术体系—决策模块
具身智能技术体系—行动模块
具身智能技术体系—反馈模块
2.2 具身智能大脑
具身智能的“脑部”组成
具身智能的技术核心:大模型
2.2.1 VLM 模型(分层模型)
具身智能 VLM 模型总结
通用机器人模型 Pi zero
PaLM-E:具身多模态语言模型
Figure AI 同 OpenAI 合作推出三层级分层决策方案
穹彻具身大脑 Noematrix Brain
银河通用三层级大模型系统
2.2.2 VLA(端到端)
具身智能 VLA 模型总结
VLA概念以及VLA技术栈
NaVILA: 用于导航的足式机器人视觉-语言-动作模型
具身大模型OpenVLA:开源的视觉-语言-动作模型
具身大模型OpenVLA:端到端训练 模视觉-语言模型VLM
视觉语言-行动(VLA)模型—Robotic Transformer2 (RT-2)
Uni-NaVid提出统一多种具身导航任务的视频-语言-动作(VLA)模型
QUAR-VLA:四足机器人的视觉-语言-动作(VLA)模型
RoboMamba:端到端VLA模型
2.2.3 VLN(视觉与语言导航)
具身智能 VLN 模型总结
VLN基本概念
VLN主要实现方法
VLA 以及 VLN 模型对比
LH-VLN:长期发展眼光的视觉语言导航:平台、基准和方法
Safe-VLN:连续环境中自主机器人视觉和语言导航的防撞
MC-GPT:通过记忆图和推理链增强视觉和语言导航
2.2.4 世界模型
具身智能世界模型总结
世界模型基本架构
世界模型关键定义及应用的发展
智元机器人联合上海AI Lab提出具身4D世界模型EnerVerse
3D-VLA:一种三维视觉-语言-动作生成世界模型
RoboDreamer:学习机器人想象力的组合世界模型
IRASim—机器人中的世界模型
Robotic World Model:机器人鲁棒策略优化的神经网络模拟器
2.3 具身智能本体
具身智能体积极与物理环境互动,涵盖了广泛的具身形态
人形机器人核心构成
机器人三大核心传感器—力/力矩传感器
机器人三大核心传感器—视觉传感器/触觉传感器
执行器:机器人硬件系统关键部件
机器人执行器分类
直线驱动器关键部位—滚珠丝杠
机器人减速器作为核心部件价值占比高
机器人的核心驱动—电机
伺服电机:机器人精准操控的担当
人形机器人灵巧手关键零部件—空心杯电机
特斯拉的Optimus在28个执行器中使用了无框力矩电机
灵巧手核心组成
灵巧手按传动方式分类
灵巧手感知系统
2.4 仿真数据
具身智能数据泛化模型总结
UnrealZoo:基于虚幻引擎为具身智能丰富逼真的虚拟世界
RoboTwin:生成式数字孪生的双臂机器人基准
RoboGSim: Real2Sim2Real范式的数据合成器和闭环仿真器
任意点轨迹模型:ATM框架
第三章 智能驾驶从业人员转入具身智能赛道
从智能驾驶领域转型至其他赛道的从业者(1)
从智能驾驶领域转型至其他赛道的从业者(2)
从智能驾驶领域转型至其他赛道的从业者(3)
3.1 星海图致力于具身机器人全栈自研,Pre-A轮融资超2亿元
星海图—首家实现端到端模仿学习算法整机闭环的具身智能公司
新型视觉模仿学习算法:3D扩散策略(DP3)
星海图推出全尺寸双臂仿人形机器人R1
3.2 逐际动力专注于运动智能与足式机器人的研发和制造
逐际动力利用LLM的理解能力,推进空间和运动智能在人形机器人上的融合
逐际动力发布CL-2
“三合一” 模块化足端设计多形态双足机器人TRON 1
3.3 银河通用自研千万级场景数据与十亿级抓取数据
DexGraspNet 2.0 灵巧手
空间智能大模型系统 Open6DOR
端到端导航大模型—NaVid
银河通用发布具身大模型机器人 Galbot(G1)
3.4 前阿里达摩院自动驾驶负责人创办有鹿机器人
具身智能大模型LPLM-10B
即插即用的通用具身大脑—Master2000
商用巡扫机器人AI 130
3.5 新生纪智能科技
新生纪智能科技智能清扫机器人四大核心技术
SP50智能清扫机器人
由 AI 驱动的洗涤器烘干机机器人 L4
3.6 智平方打通具身智能核心痛点:将AGI拓展到物理世界
智平方通用具身智能系统AI2R Brain
智平方Alpha Bot 1S 亮相2024世界机器人大会
3.7 万仞AI—覆盖全病程的大模型应用
董奉大模型,驱动医疗产业全面升级的“新引擎”
Memex技术体系
3.8 雅可比机器人致力于开放场景的商业化落地
J-Box技术
J-Mind技术
3.9 均普智能布局人形机器人在工业场景的落地
均普智能人形机器人核心芯片大部分实现国产化替代
均普智能人形贾维斯JARVIS
均普智能、北京具身智能机器人创新中心达成战略合作
第四章 主机厂具身智能赛道布局
全球车企布局具身智能机器人赛道情况(1)
全球车企布局具身智能机器人赛道情况(2)
车企机器人赛道布局时间表一览
车企机器人赛道最新产品具体参数一览(1)
车企机器人赛道最新产品具体参数一览(2)
车企机器人赛道最新产品具体参数一览(3)
4.1 特斯拉
特斯拉人形机器人 Optimus 发展历程
特斯拉人形机器人 Optimus 进化史(1)
特斯拉人形机器人 Optimus 进化史(2)
特斯拉人形机器人 Optimus 进化史(3)
特斯拉人形机器人 Optimus 最新功能(1)
特斯拉人形机器人 Optimus 最新功能(2)
特斯拉人形机器人 Optimus 最新功能(3)
特斯拉新一代灵巧手简介
特斯拉新一代灵巧手迎来三大更新
OptimusGen3灵巧手自由度
特斯拉三代灵巧手对比
特斯拉Optimus硬件参数及成本拆解
特斯拉Optimus—环境感知
特斯拉AI人形机器人BOM成本估算
特斯拉AI人形机器人硬件拆解-设计上与特斯拉汽车技术同源(1)
特斯拉AI人形机器人硬件拆解-设计上与特斯拉汽车技术同源(2)
特斯拉AI人形机器人硬件拆解-设计上与特斯拉汽车技术同源(3)
特斯拉AI人形机器人硬件拆解-旋转执行器
特斯拉AI人形机器人硬件拆解-线性执行器
特斯拉AI人形机器人硬件拆解-手部控制
特斯拉AI人形机器人硬件拆解-膝关节
特斯拉AI人形机器人硬件拆解-大脑
特斯拉AI人形机器人硬件拆解-大脑芯片
特斯拉AI人形机器人硬件拆解-大脑训练模块
特斯拉AI人形机器人硬件拆解-大脑训练集群
特斯拉AI人形机器人软件算法-FSD简介-FSD技术迁移至Optimus
特斯拉AI人形机器人软件算法-FSD简介-FSD与OPTIMUS底层模块打通
特斯拉AI人形机器人软件算法-FSD简介-FSD神经网络训练
特斯拉AI人形机器人软件算法-FSD简介-FSD神经网络训练进展
特斯拉AI人形机器人软件算法-FSD简介-FSD海量数据库为机器人AI训练提供支持
特斯拉AI人形机器人软件算法-感知算法(1)
特斯拉AI人形机器人软件算法-感知算法(2)
特斯拉AI人形机器人软件算法-感知算法(3)
特斯拉AI人形机器人软件算法-感知算法(4)
特斯拉AI人形机器人软件算法-运动规划算法(1)
特斯拉AI人形机器人软件算法-运动规划算法(2)
特斯拉AI人形机器人软件算法-运动规划算法(3)
4.2 小鹏
小鹏两代人形机器人对比
小鹏第四代人形机器人“Iron艾伦”基本参数
“Iron艾伦”鹰眼视觉系统及天玑AIOS
图灵AI芯片
“Iron艾伦”的应用前景
小鹏AI人形机器人简介
小鹏AI人形机器人硬件拆解-关节
小鹏AI人形机器人硬件拆解-灵巧手
小鹏AI人形机器人硬件拆解-机械臂
小鹏AI人形机器人软件算法-感知、交互和小鹏汽车底层能力打通
小鹏AI人形机器人软件算法-应用汽车技术-XNGP运用大模型
小鹏AI人形机器人软件算法-应用汽车技术-XNGP技术底层XBrain
小鹏AI人形机器人软件算法-感知架构-XNGP深度视觉神经网络XNet 2.0
小鹏AI人形机器人软件算法-感知架构-XNGP深度视觉神经网络XNet数据标注
小鹏AI人形机器人软件算法-规划控制架构-XNGP基于神经网络的XPlanner
4.3 小米
小米布局机器人重大节点
小米AI人形机器人规划
小米四足机器人CyberDog 2
小米 CyberOne 硬件结构
小米 CyberOne 关节模组
小米 CyberOne 动力系统
小米 CyberOne 通讯系统
小米 CyberOne 控制系统
小米CyberOne软件算法
4.4 广汽集团
广汽第二代和第三代机器人参数功能特点对比
广汽集团第二代具身智能机器人
广汽集团第三代具身智能人形机器人——GoMate 基本参数
GoMate 驱控一体式关节模组
GoMate 微型低压伺服驱动器
GoMate 灵巧手
GoMate 软件和系统
广汽自动驾驶技术在人形机器人上的应用
4.5 比亚迪
比亚迪具身智能赛道布局
4.6 现代集团
现代汽车收购波士顿动力公司80%股份
X-ble Shoulder 外骨骼机器人
X-ble MEX可穿戴医疗机器人
2019年9月现代汽车推出两款外骨骼可穿戴设备
现代汽车智能服务机器人DAL-e
4.7 奇瑞汽车
奇瑞全新双足机器人Mornine
Mornine应用规划阶段
4.8 丰田汽车
丰田人形机器人发展历程
丰田研究所(TRI)与波士顿动力合作开发人形机器人
丰田家庭服务机器人“巴士男孩”
丰田可穿戴机器人Welwalk
4.9 华为
华为机器人赛道布局
华为正式入局,具身智能产业趋势再强化
华为盘古具身大模型
第五章 汽车产业链供应商布局具身智能赛道
供应商布局具身智能机器人赛道情况—传感器
供应商布局具身智能机器人赛道情况—减速器
供应商布局具身智能机器人赛道情况—灵巧手、电机
供应商布局具身智能机器人赛道情况—整机
5.1 禾赛科技具身智能赛道布局
禾赛科技简介
禾赛科技机器人市场激光雷达
迷你型高性能3D激光雷达
禾赛科技适用机器人场景的激光雷达—QT128
禾赛科技适用机器人场景的激光雷达—XT32
5.2 速腾聚创具身智能赛道布局
速腾聚创简介
Papert 2.0 灵巧手
Active Camera机器人之眼
数字激光雷达赋能车载和机器人感知能力
机器人增量零部件开发
5.3 拓普集团具身智能赛道布局
拓普集团简介
拓普集团:拟50亿元投建机器人核心部件生产基地
拓普以多重核心优势构筑机器人执行器业务竞争力
5.4 三花智控具身智能赛道布局
三花智控简介
三花智控钱塘布局机器人产业项目
三花智控与绿的谐波签订战略合作协议
5.5 汇川技术具身智能赛道布局
汇川技术简介
汇川技术SCARA机器人—IR-S4系列
汇川技术六关节机器人—IR-R300系列
汇川技术机器人配套软件
汇川技术工业机器人控制柜IRCB500系列
汇川技术工业机器人精密机械—滚珠丝杠
汇川技术工业机器人精密机械—直线导轨
5.6 兆威机电机器人
兆威机电简介
高性能微电机技术助力兆威机电实现人形机器人应用落地
兆威机电在深圳高交会举办发布会,正式推出其手指集成驱动的高可靠灵巧手
兆威机电机器关节无刷舵机
兆威机电割草机器人行走执行器微型驱动系统
5.7 双环传动机器人
双环传动简介
双环传动布局RV减速器赛道
环动科技高精密谐波传动减速机
机器人高精密摆线行星减速机—SHPR-C
机器人高精密摆线行星减速机—SHPR-E
5.8 禾川科技机器人
禾川科技简介
禾川技术机器人赛道在研项目
“YOLO”游龙01通用型人形机器人
“YOLO01”人形机器人自研零部件(1)
“YOLO01”人形机器人自研零部件(2)
5.9 中科创达
中科创达简介
中科创达将基于Arm技术赋能下一代多模态智能机器人
创通联达正式推出RUBIK Pi 3(魔方派3开发套件)
机器人魔方大模型(Rubik Robot)
2024年11月5日 CeMAT ASIA 中科创达旗下晓悟智能携诸多智能机器人新品亮相(1)
2024年11月5日 CeMAT ASIA 中科创达旗下晓悟智能携诸多智能机器人新品亮相(2)
晓悟智能机器人软件平台RSP
5.10 宁德时代
宁德时代简介
宁德时代布局机器人产业:自研机械臂与外部合作并行发展
宁德时代推出移动储充检一体机器人“CharGo充电狗”
5.11 纵目科技机器人
纵目科技简介
蚕丛机器人FlashBot闪电宝
FlashBot闪电宝商业模型—赋能光储充一体化
5.12 商汤科技机器人
商汤科技简介
商汤科技具身智能赛道布局
“日日新5.5”赋能人形机器人的“眼力”和“脑力”
商汤大装置为具身智能打造新一代AI基础设施
5.13 毫末智行
毫末智行简介
毫末智行多款机器人落地西部智谷,携手打造新质生产力
毫末智行 DriveGPT 雪湖·海若加持小魔驼
5.14 地平线
地平线公司简介
地瓜机器人产品演进路线
2024地瓜机器人开发者日机器人全链路产品发布
RDK 一站式智能机器人开发者套件(1)
RDK 一站式智能机器人开发者套件(2)
旭日5智能计算芯片
地瓜机器人算法中心NodeHub/开发助手RDK-Copilot
第六章 具身智能发展趋势
6.1 技术趋势
具身智能推动机器人技术从单一感知向多模态感知发展
软硬件协同发展促进产业正循环
视觉+触觉的方案技术指标更优、有望成为未来的主流方案
技术趋势(4)
技术趋势(5)
技术趋势(6)
技术趋势(7)
技术趋势(8)
技术趋势(9)
技术趋势(10)
技术趋势(11)
6.2 产品趋势
多种机器人载体形态共同发展
具身智能多种机器人载体形态共同发展—机器狗
具身智能多种机器人载体形态共同发展—特种机器人
产品趋势(4)
产品趋势(5)
产品趋势(6)
产品趋势(7)
产品趋势(8)
产品趋势(9)
6.3 产业市场趋势
全球/中国人形机器人市场规模持续增长
市场需求趋势:人形机器人出现有望缓解市场劳动力缺口
2024年迎来具身智能投资热潮,增量零部件与具身模型受到资本青睐
产业趋势(4)
产业趋势(5)
产业趋势(6)
产业趋势(7)
产业趋势(8)
产业趋势(9)