2025年全球人形机器人产业处于从技术验证向场景渗透的关键转折期,工业、服务、特种、家庭等多种场景的潜在市场超过数十万亿元。然而,人形机器人市场规模化落地仍面临三大核心瓶颈:一是人形机器人产品成本体系尚未突破临界点,二是智能化水平存在代际差距,三是数据要素供给严重不足。佐思汽研通过深入剖析 21 家中美头部厂商及其代表产品的技术路线与产品矩阵,对标各家人形机器人产品竞争力、解答新一代产品的降本路径及产品演进方向等问题。
趋势一:人形机器人市场历经三次技术发展更迭
人形机器人产业的演进史,本质上是人类对“智能生命体”认知的深化过程。从早期的机械骨架实验,到如今依托AI大模型的自主决策能力,技术突破正逐步消弭“机器”与“人”的边界。截至目前,人形机器人行业的发展可以分为三个重要节点,分别是初步探索期、技术积累期以及AI大模型重构认知决策体系时期。
初步探索期(20 世纪 60 年代末 - 90 年代末):动态行走理论构建机械骨架
20世纪60年代末至90年代末是初步探索期,在此阶段,美国、欧盟和韩国纷纷投入相关研究,重点聚焦双足行走的运动学与动力学原理,美国Marc Raibert教授提出的“动态行走理论”,为后续发展勾勒出基础技术轮廓。此阶段的代表厂商为元老级厂商Boston Dynamics(1992)。
技术积累期(21 世纪初 - 2022 年):传感控制赋能物理世界交互
在 21 世纪初至 2022年的技术积累期,行业着力于传感与智能控制技术的深度融合及系统集成。此阶段,机器人不仅实现了基础运动控制的优化,更在周围环境基本信息感知层面取得突破,能够基于简单判断做出相应动作调整。这些技术积淀为后续人形机器人的飞速发展筑牢根基,典型代表厂商如 Boston Dynamics,于2013年展示的双足 Atlas 机器人,具备在复杂地形中行走、奔跑、跳舞、搬运乃至完成高难度动作的卓越能力,标志着人形机器人向更复杂、更智能的应用场景迈出关键一步。中美众多厂商纷纷入局,包括优必选(2012)、Agility Robotics(2015)、宇树(2016)、Apptronik(2016)。
具身智能新纪元(2022 年至今):AI 大模型重构认知决策体系
2022年后,人形机器人产业迎来历史性转折——OpenAI GPT-4、谷歌RT-2等AI大模型的突破,首次赋予机器人语义理解、任务分解与自主决策能力,推动行业正式迈入具身智能(Embodied AI)新纪元。特斯拉Optimus通过端到端大模型,仅需人类示范数据即可自主学习复杂任务(如物体分类、路径规划),其决策准确率提升60%,人工编程成本大幅降低。与此同时,英伟达Omniverse平台构建的物理仿真引擎,通过精确模拟真实场景的动力学特性,支持“虚拟训练-实体验证”闭环,将机器人开发效率提升3倍,试错成本降低80%。
技术革新浪潮下,Figure AI(2022)、逐际动力(2022)、智元机器人(2023)、银河通用(2023)等初创企业应势而起,精准锚定工业制造、物流仓储、家庭服务等垂直场景持续深耕。与此同时,丰田、现代、广汽、奇瑞等传统主机厂,特斯拉、小鹏、小米等新势力车企,以及英伟达、DeepMind、华为等 AI基础设施厂商纷纷加速战略布局,依托技术研发、制造工艺或生态资源优势抢占市场高地,多方协同共进,为人形机器人产业的蓬勃发展注入强劲动能。
趋势二:人形机器人包含4类玩家,运动、场景、制造、AI 成破局关键因子
人形机器人本体设计、制造与集成是人形机器人产业链的核心环节,是人形机器人产业化、商业化的关键,目前人形机器人本体行业仍处于探索阶段。人形机器人本体玩家,根据其原有属性大致可分为元老级机器人企业、原生机器人企业、车企跨界布局企业和初创型企业四类。四类玩家正以不同路径攻克产业化难题 —— 元老级企业突破运动极限,原生派夯实场景根基,车企重塑制造范式,初创者引领 AI 融合 —— 共同推动人形机器人产业跨过 “0-1” 拐点,开启 “人机共融” 的万亿新蓝海。

图片来源:佐思汽研
趋势三:全身自由度方面,星动 STAR1与小鹏 Iron处于领先地位
从运动能力对比来看,在全身自由度方面,星动 STAR1(55 DoF)与小鹏 Iron(62 DoF)处于领先地位,具备更强的运动灵活性。宇树 H1 为 19 DoF,Walker S1 达 41 DoF,远征 A2 为 40+ DoF,而 Figure 02 仅 16 DoF,差异显著。关节扭矩额定值上,星动 STAR1 达 400 N・m,展现出强大的力量输出;宇树 H1 为 360 N・m,CyberOne 为 300 N・m,Galbot(G1)相对较低,仅 120 N・m。
综合来看,星动 STAR1 与小鹏 Iron 凭借顶尖的自由度及关节扭矩,具备最强运动灵活性与负载能力,擅长复杂高负载任务;远征 A2 自由度较高(40+ DoF),运动灵活性突出,且关节扭矩平衡,适用于中等复杂度任务;宇树 H1 及 CyberOne 关节扭矩优势明显但自由度相对低,更适配大负载、动作较简单的场景;Digit-4 与 Figure 02 自由度及扭矩均处较低水平,主要适配基础简单任务;CL-1 与 GoMate 自由度和关节扭矩中等,具备基础运动灵活性与任务执行能力,适配常规性作业场景。
人形机器人产品全身自由度对比
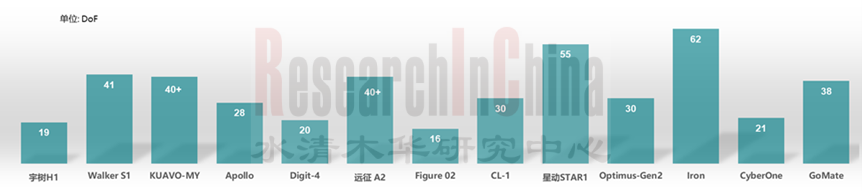
备注:Optimus Gen2未包含手部自由度,每只手自由度为11
图片来源:佐思汽研
人形机器人产品关节扭矩额定对比
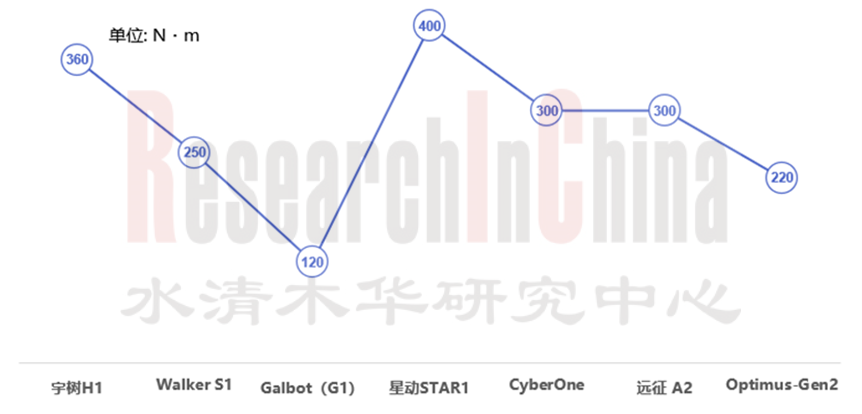
图片来源:佐思汽研
趋势四:多数人形机器人续航在 2 小时左右,少数达到8-12小时
人形机器人产品续航里程对标分析
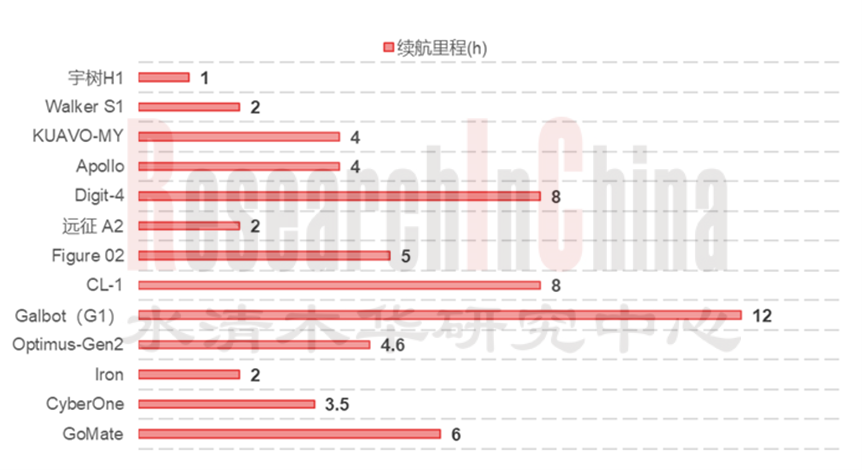
图片来源:佐思汽研
通过对人形机器人核心产品续航里程的对标分析可见,多数机型续航集中在 2 小时左右,如宇树 H1 续航 1 小时,优必选 Walker S1、小鹏 Iron 均为 2 小时,这主要受制于电池能量密度不足与关节驱动高能耗。部分厂商通过结构优化或电池技术创新实现突破,乐聚 KUAVO-MY、Apptronik Apollo 单次续航达 4 小时;Agility Robotics Digit - 4 续航 8 小时,其下一代新品更有望达12小时;银河通用 Galbot(G1)凭借轮式双臂与全向移动底盘设计,续航长达12小时,适配工业场景需求。从行业趋势看,短期可通过算法优化与模块化设计降低能耗,长期则依赖固态电池、钠离子电池等高能量密度技术突破瓶颈。
工业场景对续航要求严苛(需 8-12小时),目前仅部分产品接近标准;家庭服务类因任务碎片化,续航压力较小,如小米CyberOne家庭实测续航3.5小时,广汽GoMate采用全固态电池与可变轮足设计,能耗降 80%,续航提升至 6小时。未来,续航技术的进步将为人形机器人拓展更广泛的应用场景奠定基础。
趋势五:人形机器人未来演进方向——轻量化、感知多维化、运动性能拟人化
Tesla Optimus Gen 1→Optimus Gen 2技术演进方向

图片来源:佐思汽研
特斯拉Optimus通过打造具备 “类人灵活性、工业可靠性、AI 自主性”的通用人形机器人,成为特斯拉 “硬件即服务” 战略的核心终端,Optimus产品演进趋势总结:
(1)轻量化设计: Gen2 体重从 73kg减至 63kg,采用镁合金(密度 1.72g/cm³)与碳纤维复合材料,在保证结构强度的同时减轻重量,提升能源利用效率与运动灵活性,符合机器人长期运行与敏捷操作的需求,也为后续更多场景应用(如家庭服务)奠定基础
(2)感知能力多维化:触觉与力感知上增加手指尖压力传感器、脚底触觉矩阵、脚踝 6 维力传感器及手腕多维力传感器,实现更精准的接触力感知与平衡控制,适应复杂场景;力/力矩:脚踝 6 维力传感器(动态平衡控制)+ 手腕多维力传感器(操作力度实时调节)
(3)运动性能优化:步行速度从约 6km/h提升至约8km/h(提高 30%),平衡感和身体控制能力显著改善。通过优化执行器配置(旋转关节从 20 个增至 28 个、线性关节从 8 个增至 14 个)与运动算法,使机器人运动更敏捷、稳定,可完成深蹲、单腿瑜伽等复杂动作,向更接近人类运动模式演进。
(4)智能化与算法进步:
•算力:搭载 Dojo D1 芯片(362 TOPS 算力),支持端到端训练(视频输入→控制输出)
•神经网络:从预设动作编程进化到 AI 自主决策,通过视觉信号直接生成关节控制指令
•训练方式:基于特斯拉工厂数据的强化学习,动态优化行走步态与操作策略
(5)执行器系统升级:数量与复杂度:旋转关节、线性关节数量增加,手部执行器从简单抓取结构升级为 11 自由度灵巧手(每指 3 自由度 + 拇指 2 自由度),提升运动灵活性、多样性与操作精度。
Optimus Gen 2 VS. Optimus Gen 1:产品参数对标
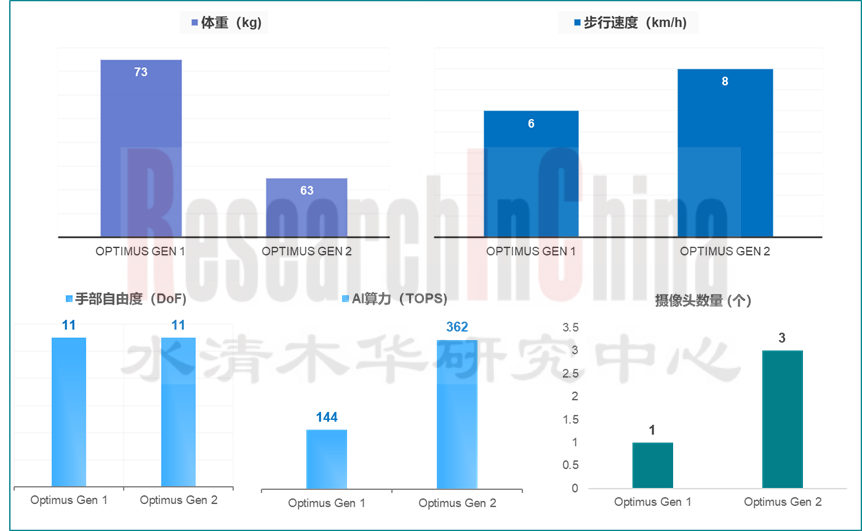
图片来源:佐思汽研
趋势六:2025是结构化场景量产元年,未来 5 年攻坚家庭场景
2025年成为工业制造、汽车制造规模化量产元年
从市场需求端,人形机器人可高效承接工业制造中自动化设备难以完成的高精度、重复性作业,推动工业生产全自动化。技术壁垒方面,工业制造、物流仓储等结构化场景规范性强,模型训练难度较低。基于此,多数人形机器人企业将工业制造、汽车智能制造、仓储物流、安防巡检等结构化场景,作为商业化落地的 “第一战场”。
人形机器人代表产品规模化落地时间预研对标分析

来源:佐思汽研
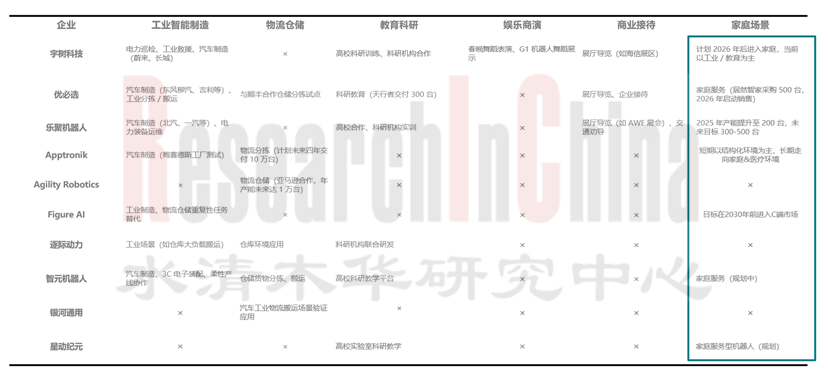
人形机器人场景渗入遵循“从结构化→半结构化场景→非结构化场景→通用场景”进程,家庭场景将成为2025-2030阶段人形机器人代表厂商的布局焦点
家庭场景以全球16亿家庭户的庞大基数、老龄化催生的护理陪伴刚需,以及日均超10小时的家务劳动需求,构成万亿级消费市场的核心增量空间。作为智能家居生态的终极交互入口,其布局本质是对未来 “人机共融” 生活方式定义权的战略争夺。无论是美国工业机器人巨头的技术下沉路径,还是中国全场景玩家的生态延伸策略,均将家庭环境下的复杂人机协同视为核心赛道 —— 尽管非结构化场景对机器人语义理解、动态决策的苛刻要求,使得规模化量产尚需 5-10 年技术迭代,但这一领域早已成为兵家必争的未来智能终端战略要地。
从工厂到家庭:人形机器人厂商双轮驱动的产业变革之路
来源:佐思汽研
01 行业概览:具身智能驱动人形机器人产业变革
1.1 政策
国家层面人形机器人相关政策/计划(2021年-2024年)
国家顶层设计发布,支持人形机器人产业发展
各地建立创新中心,布局AI机器人产业集群
1.2 具身智能及人形机器人市场综述
具身智能发展演进历程
具身智能应用场景演进
美国/中国人形机器人市场规模持续增长
2025 - 2035 年国内人形机器人市场空间测算
2024年迎来具身智能投资热潮,增量零部件与具身模型受到资本青睐
全球人形机器人专利申请数量
1.3 具身智能及人形机器人简介
具身智能基本概念
具身智能涵盖了广泛的具身形态
人形机器人整体结构
人形机器人线性执行器简介
人形机器人旋转执行器简介
人形机器人感知系统(视觉+触觉)简介
人形机器人感知系统(力觉+惯性)简介
人形机器人灵巧手简介
灵巧手按传动方式分类
特斯拉灵巧手简介
具身“大脑”+“小脑”
具身智能大脑的典型技术方案
具身智能 VLM 模型一览(部分)
具身智能 VLA 模型一览(部分)
具身智能技术迭代路径
具身智能技术系统层级架构
具身智能三大构成部分
具身智能技术架构—感知、决策及行动模块
具身智能技术体系—反馈模块
1.4 具身智能及人形机器人驱动力
市场需求趋势:人形机器人出现有望缓解市场劳动力缺口
具身智能是推动新质生产力建设的重要引擎
AI大模型进一步提高了人形机器人的智能化
开源数据集驱动具身智能产业增长
人形机器人硬件市场国产化推动机器人成本降低
1.5 具身智能及人形机器人产业发展趋势
人形机器人厂商现阶段正加速B端落地
2025量产化元年:人形机器人的量产趋势正在逐步显现
具身智能多种机器人载体形态共同发展—机器狗
数据采集方式不断进化,仿真数据有望驱动机器人实现未来智能跃迁
具身智能大脑的演进路线从VLM到VLA
02 人形机器人供应链全景图分析
2.1 具身智能及人形机器人供应链全景图总览
人形机器人核心硬件构成及成本
以特斯拉Optimus为例:人形机器人核心零部件成本占比
人形机器人核心硬件市场重点企业
2.2 核心零部件—无框力矩电机供应链分析
无框力矩电机简介
无框电机未来市场规模预估
无框力矩电机供应商竞争格局
无框力矩电机国际供应商对标分析
无框力矩电机国内供应商对标分析
2.3 核心零部件—丝杠供应链分析
丝杠简介
丝杠产品未来市场规模预估
滚珠丝杠供应商竞争格局
滚珠丝杠国际供应商对标分析
滚珠丝杠国内供应商对标分析
2.4 核心零部件—空心杯电机供应链分析
空心杯电机简介(1)
空心杯电机简介(2)
空心杯电机未来市场规模预估
空心杯电机供应商竞争格局
空心杯电机国际供应商对标分析
空心杯电机国内供应商对标分析
2.5 核心零部件—力传感器供应链分析
六维力传感器简介
六维力力传感器未来市场规模预估
六维力传感器供应商竞争格局
六维力传感器国际供应商对标分析
六维力传感器国内供应商对标分析
2.6 核心零部件—柔性触觉传感器供应链分析
柔性触觉传感器简介
柔性触觉传感器未来市场规模预估
柔性触觉传感器供应商竞争格局
柔性触觉传感器国际供应商对标分析
柔性触觉传感器国内供应商对标分析
2.7 核心零部件—轴承供应链分析
轴承简介
单台人形机器人轴承价值量预估
轴承未来市场规模预估
轴承供应商竞争格局
轴承国际供应商对标分析
轴承国内供应商对标分析
2.8 核心零部件—减速器供应链分析
减速器简介
减速器产品未来市场规模预估
减速器供应商竞争格局
减速器国内供应商对标分析
减速器国际供应商对标分析
2.9 核心零部件—PEEK材料供应链分析
PEEK材料简介
人形机器人材料用量及成本
PEEK材料产品未来市场规模预估
PEEK材料供应商竞争格局
PEEK材料国际/国内供应商对标分析
03 人形机器人代表厂商分析
3.1 宇树科技
宇树科技简介
宇树产品矩阵
宇树科技核心竞争力(1)
宇树科技核心竞争力(2)
宇树科技核心竞争力(3)
海外市场布局
宇树科技人形机器人产品对标分析(1)
宇树科技人形机器人产品对标分析(2)
宇树科技四足机器人产品对标分析
宇树科技供应链分析(1)
宇树科技供应链分析(2)
宇树科技供应链分析(3)
宇树科技的客群分析
3.2 优必选
优必选简介
优必选经营状况分析
2025年优必选战略新动向
优必选产品战略
优必选工业场景加速规模化落地战略(1)
优必选工业场景加速规模化落地战略(2)
优必选人形机器人产品参数对标分析
优必选人形机器人的演化路径
优必选核心竞争力分析
3.3 乐聚机器人
乐聚机器人简介
乐聚机器人发展规划
乐聚人形机器人产品发展历程
乐聚机器人的核心竞争力
乐聚人形机器人产品参数对标分析
乐聚人形机器人产品零部件分析
乐聚人形机器人批量交付的三大应用场景及商业合作伙伴
3.4 Apptronik
Apptronik简介
Apptronik发展规划
Apptronik在算力、数据、AI方面的布局
Apptronik核心竞争力分析
Apptronik首款人形机器人Apollo产品参数对标分析
Apptronik机器人产品零部件分析
Apollo商业落地场景分析
3.5 Agility Robotics
Agility Robotics简介
Agility Robotics战略规划
Digit系列产品参数分析
Agility Robotics产品零部件分析
Agility Robotics商业落地场景分析
3.6 智元机器人
智元机器人简介
智元机器人产品组合与产品战略布局
智元机器人产品参数对标分析
智元机器人发展规划
智元核心竞争力(1)
智元核心竞争力(2)
智元核心竞争力(3)
智元机器人的技术发展方向
智元机器人供应链分析(1)
智元机器人供应链分析(2)
智元机器人灵巧手技术拆解
智元机器人灵巧手供应链分析
3.7 Figure AI
Figure AI 简介
Figure AI 人形机器人产品对标分析
Figure AI 核心竞争力(1)
Figure AI 核心竞争力(2)
Helix大模型
Figure AI 核心竞争力(3)
Figure AI 商业化应用场景及模式
Figure AI 供应链分析(1)
Figure AI 供应链分析(2)
Figure AI 面临的挑战与竞争对比
3.8 逐际动力
逐际动力简介
逐际动力双足机器人 Tron 1 产品参数
逐际动力双足机器人核心技术特点
逐际动力人形机器人 CL 产品参数
逐际动力核心竞争力
逐际动力商业化应用场景及模式
逐际动力对外投资企业
3.9 银河通用
银河通用简介
银河通用人形机器人 Galbot(G1) 产品参数
银河通用核心技术—三层级大模型系统
银河通用核心竞争力(1)
银河通用核心竞争力(2)
银河通用商业化应用场景及模式
银河通用供应链及成本构成分析
3.10 北京星动纪元
北京星动纪元简介
北京星动纪元人形机器人产品参数
北京星动纪元核心竞争力(1)
北京星动纪元核心竞争力(2)
北京星动纪元核心竞争力(3)
北京星动纪元商业化应用场景及模式
北京星动纪元供应链及成本构成
车企机器人赛道布局时间表一览
3.11 特斯拉 Optimus
特斯拉Optimus产品参数
特斯拉Optimus商业化进展及未来规划
特斯拉新一代灵巧手参数
特斯拉Optimus核心竞争力(1)
特斯拉Optimus核心竞争力(2)
特斯拉Optimus核心竞争力(3)
特斯拉Optimus核心竞争力(4)
特斯拉汽车产业在人形机器人上的共通性
特斯拉汽车产业在人形机器人上的共通性
3.12 小鹏IRON
小鹏形机器人产品参数对比
小鹏机器人核心竞争力(1)
小鹏机器人核心竞争力(2)
小鹏机器人商业化进展及未来规划
小鹏Iron机器人成本及供应链构成
小鹏汽车产业在人形机器人上的共通性
3.13 小米CyberOne
小米 CyberDog 机器人参数
小米 CyberOne 机器人参数
小米机器人核心竞争力(1)
小米机器人核心竞争力(2)
小米机器人成本及供应链构成
小米机器人商业化进展及未来规划
小米机器人赛道投资情况
小米汽车产业在人形机器人上的共通性
3.14 广汽GoMate
广汽人形机器人基本参数
广汽Gomate核心竞争力(1)
广汽Gomate核心竞争力(2)
广汽汽车产业在人形机器人上的共通性
广汽具身智能机器人发展规划
3.15 奇瑞Mornine
奇瑞人形机器人 Mornine 产品参数
Mornine未来应用规划阶段
3.16 丰田汽车
丰田人形机器人发展历程
丰田研究所(TRI)与波士顿动力合作开发人形机器人
丰田家庭服务机器人“巴士男孩”产品参数
丰田可穿戴机器人Welwalk产品参数
丰田机器人Punyo产品参数
丰田机器人赛道投资情况
3.17 现代集团
现代汽车收购波士顿动力公司80%股份
现代X-ble Shoulder 外骨骼机器人产品参数
现代汽车智能服务机器人DAL-e
3.18 Boston Dynamics
Boston Dynamics简介
Boston Dynamics 下一步战略规划
Boston Dynamics 产品组合及对标分析
Atlas人形机器人演进历程
Boston Dynamics在算力、软件算法的布局
Boston Dynamics2025年开启人形机器人商用元年
3.19 NVIDIA
英伟达在AI与人形机器人领域的布局
2025英伟达全新机器人核心成果 (1)
2025英伟达全新机器人核心成果 (2)
英伟达商业合作伙伴(1)
英伟达商业合作伙伴(2)
3.20 DeepMind
DeepMind简介
基于 Gemini 2.0 的新型机器人 AI 模型(1)
基于 Gemini 2.0 的新型机器人 AI 模型(2)
DeepMind在人形机器人领域的商业落地进展
3.21 华为
华为机器人赛道布局历程
华为正式入局,具身智能产业趋势再强化
华为盘古具身大模型
华为在人形机器人赛道的战略目标
华为在人形机器人赛道商业化落地进展
04 人形机器人厂商战略布局、产品对标、成本结构分析
4.1 人形机器人代表厂商产品战略规划动向对标
人形机器人本体厂商分类
原生机器人厂商公司定位及战略动向对比
初创型人形机器人本体公司定位及战略动向对比
汽车跨界布局人形机器人本体公司定位及战略动向对比
4.2 人形机器人代表厂商产品规模化落地时间预研
人形机器人代表厂商产品规划概览
各人形机器人厂商产品组合矩阵对标
人形机器人核心产品规模化落地时间预研对标分析(1)
人形机器人核心产品规模化落地时间预研对标分析(2)
人形机器人核心产品规模化落地时间预研对标分析(3)
4.3 人形机器人代表厂商产品参数对标
人形机器人核心产品基础参数对比分析
人形机器人核心产品价格图谱:头部厂商代表机型定价对比解析
人形机器人核心产品场景应用对标分析
运动能力对比(1)
运动能力对比(2)
运动能力对比(3)
人形机器人核心产品感知能力对标分析(1)
人形机器人核心产品感知能力对标分析(2)
人形机器人核心产品感知能力对标分析(3)
人形机器人核心产品视觉与语言交互能力对标分析
人形机器人产品核心产品续航里程对标分析
4.4 人形机器人代表厂商技术路线对比
人形机器人核心产品控制系统技术路线对标分析(1)
人形机器人核心产品控制系统技术路线对标分析(2)
人形机器人核心产品控制系统技术路线对标分析(3)
人形机器人核心产品AI能力对标分析(1)
人形机器人核心产品AI能力对标分析(2)
国内外人形机器人代表AI芯片对比分析
4.5 人形机器人代表产品整机BOM拆解
宇树H1机器人整机BOM成本拆解
智元A2整机BOM成本拆解
优必选Walker S1整机BOM成本拆解
特斯拉Optimus整机BOM成本拆解
Atlas产品(电驱版)整机BOM成本拆解
Atlas电驱版与其他竞品成本对标分析
Atlas 人形机器人未来5大降本策略
人形机器人厂商的8大降本策略
人形机器人厂商降本策略对比分析
05 规模化落地场景挑战及发展趋势总结
5.1 规模化落地技术、成本、市场挑战
中国具身智能企业竞争壁垒
技术挑战—具身智能核心技术环节面临多重挑战
技术挑战—主要硬件难点及挑战
技术挑战—缺乏用于训练的高质量数据
成本挑战—高端人形机器人目前价格昂贵,限制了其可获得性
应用挑战—目前人形机器人存在场景适应性问题
5.2 从头部玩家布局看人形机器人市场与产品趋势
人形机器人规模化落地生态加速构建
Digit人形机器人产品技术演进方向分析(1)
Digit人形机器人产品技术演进方向分析(2)
Tesla Optimus人形机器人产品技术演进方向分析(1)
Tesla Optimus人形机器人产品技术演进方向分析(2)
人形机器人产品技术演进方向总结(1)
人形机器人产品技术演进方向总结(2)
人形机器人发展路径趋势