发布的《2025年触觉传感器研究报告》,报告中对触觉传感器的基本概念、技术原理、不同技术路线的优劣势、技术发展趋势、触觉传感器的应用(含机器人灵巧手、电子皮肤、汽车、工业自动化、智能家居等)、国内供应商及其产品、国外供应商及其产品等进行了研究分析与梳理总结。
触觉传感器是一种能够感知和测量表面法向力(压力)、切向力、温度、硬度、纹理等触觉信息的设备。按照感知原理分为压阻式传感器、电容式传感器、压电式传感器、视触觉传感器、磁电式(霍尔式)传感器、光电式传感器。
按照感知原理分类的触觉传感器
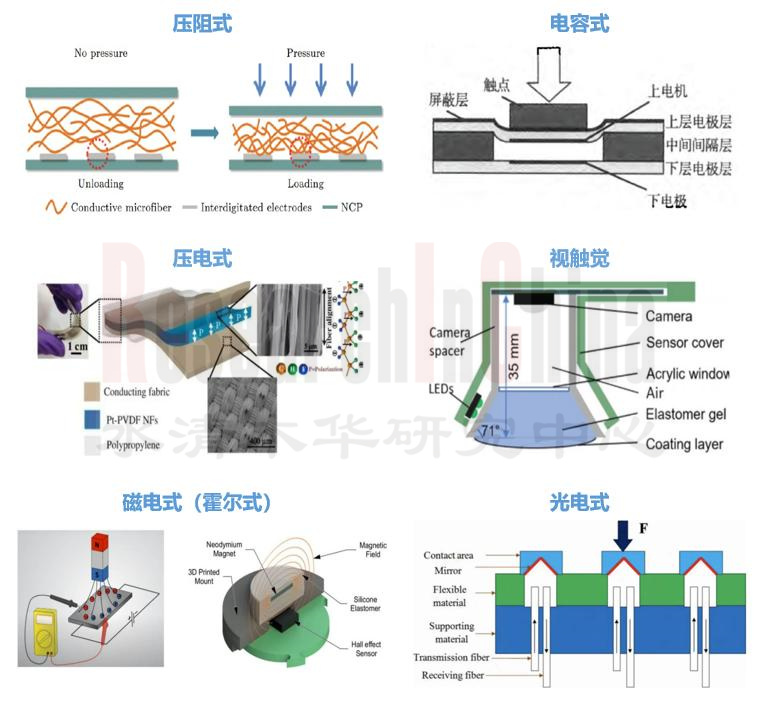
来源:佐思汽研《2025年触觉传感器研究报告》
触觉传感器各个技术路线百花齐放
压阻式、电容式、压电式、视触觉、磁电式(霍尔式)、光电式六种不同原理的触觉传感器各具优势,吸引了不少学者及企业研究,目前各个触觉传感器技术路线正百花齐放,尚未收敛。
其中,压阻式触觉传感器原理是力作用改变导电材料电阻值,通过检测电阻变化来反映外部压力或接触状态的变化。因压阻式传感器制作成本低,目前应用最为广泛,典型供应商有汉威科技-能斯达、墨现科技、埔慧科技、福莱新材等。
墨现科技触觉传感器产品—指腹压力传感器

来源:墨现科技
电容式触觉传感器是根据外部刺激引起的电容变化获取受力信息。电容式触觉传感器空间分辨率和灵敏度比电阻式触觉传感器高,且易于阵列化集成,可测量三维力。另外,电容式触觉传感器是唯一可测量接近觉的触觉传感器,国内外研究者众多,代表供应商有汉威科技-能斯达、他山科技、赛感科技、纽迪瑞、钛深科技、PPS、Baumer等。
PPS触觉传感器应用于日本早稻田大学研发的机器人“Twendy-One robot”

来源:PPS(Pressure Profile Systems)
压电式触觉传感器原理:施加到器件上的力使压电材料变形,材料内部产生电荷极化,并出现与材料表面相反的电荷,这种效应可以被用来检测外部刺激(如压力、振动等)。压电式触觉传感器量程宽且信号的线性度高,但采集电路略复杂,目前以国外供应商为主,如Tekscan、JDI、Novasentis等。
Novasentis触觉传感器产品—CLIC 1010

来源:Novasentis
视触觉式触觉传感器基于视觉的触觉感知装置,可以类比为微型的“接触成像系统”,利用光学原理实现高空间分辨率和宽动态响应范围。例如GelSight视触觉传感器基于光度立体法原理,识别纹理表面对软弹性体压缩所引起的形态变化,将微小形变放大并转换为清晰的图像,就是通过拍摄图像的形变来反推受力变化。国内供应商有他山科技、戴盟机器人、纬钛机器人等。
智元机器人灵巧手的视触觉传感方案
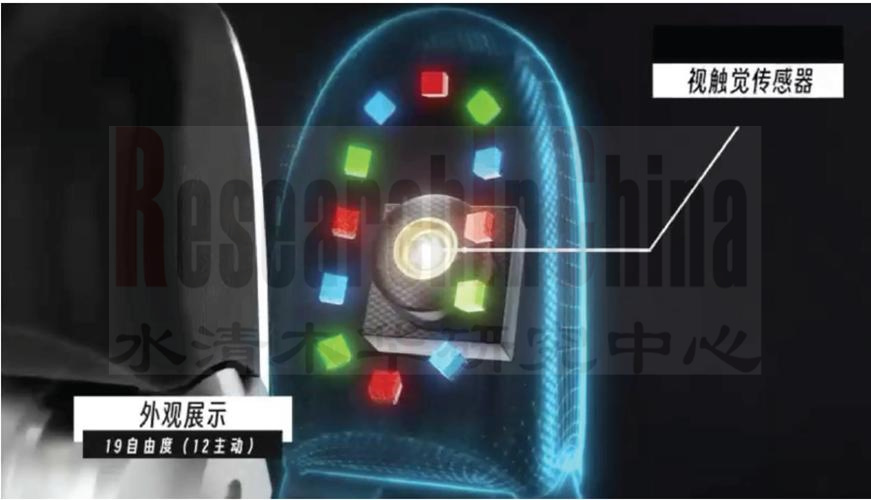
来源:智元机器人
磁电式(霍尔式)触觉传感器利用霍尔效应,将输入力变换成感应电势输出的传感器,其响应速度快,可达毫秒级。光电式触觉传感器原理是:外界压力改变介质的光学特性、光线传播路径、透射光强度,将光信号的变化转换为电信号,实现对压力等触觉信息的感知。光电式触觉传感器可实现多模态感知:含压力、硬度、振动、滑动等多种触觉特征的检测。
不同原理的触觉传感器优缺点及代表供应商
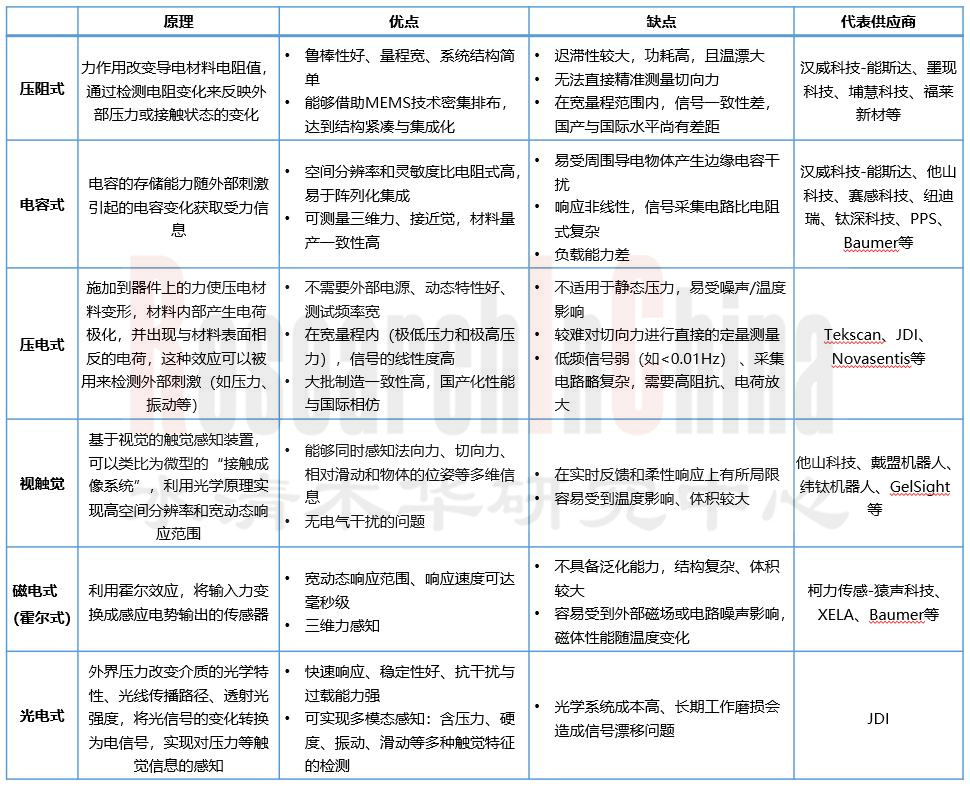
来源:佐思汽研《2025年触觉传感器研究报告》
多感知技术路线融合满足多维感知需求
实际应用中,触觉传感器需要满足压力、温度、湿度、材质识别等多维信息感知需求。例如,机器人抓取物品时,需通过 “力-温度-纹理” 多模态感知,识别物体是否打滑(力变化)、是否高温(温度)、是否易碎(硬度);医疗康复假肢皮肤需同时感知压力(避免压疮)、温度(防止烫伤)、湿度(监测皮肤状态)等。
而单一技术路线(如电阻式、电容式)难以覆盖所有需求,因此需通过融合实现 “1+1>2” 的效果。多感知技术路线融合是实现触觉传感器多模态感知的核心手段,通过整合不同原理、不同材料或不同结构的技术,让传感器同时感知力、温度、湿度、纹理、硬度等多种物理量。
他山科技TS-V视触融合技术平台融合双目视触觉和电容式触觉感知,实现三维力测力精度达到0.01N,分辨率达到1mm,且可识别30多种不同材质,还具备接近觉感知,能实现2cm的隔空感知距离。
他山科技与清华联合开发的视-触觉融合的自适应抓取灵巧手

来源:他山科技
触觉传感器使机器人具备类人感知
触觉传感器可带给机器人类人的感知能力,模拟皮肤对压力、摩擦力、应变力等外界刺激的感知能力,还可感知目标物体的硬度、纹理、温度、湿度等物理特性,并将这些物理信号转化为电信号,最终实现与外界环境的精准交互。
触觉传感器在机器人领域的应用场景
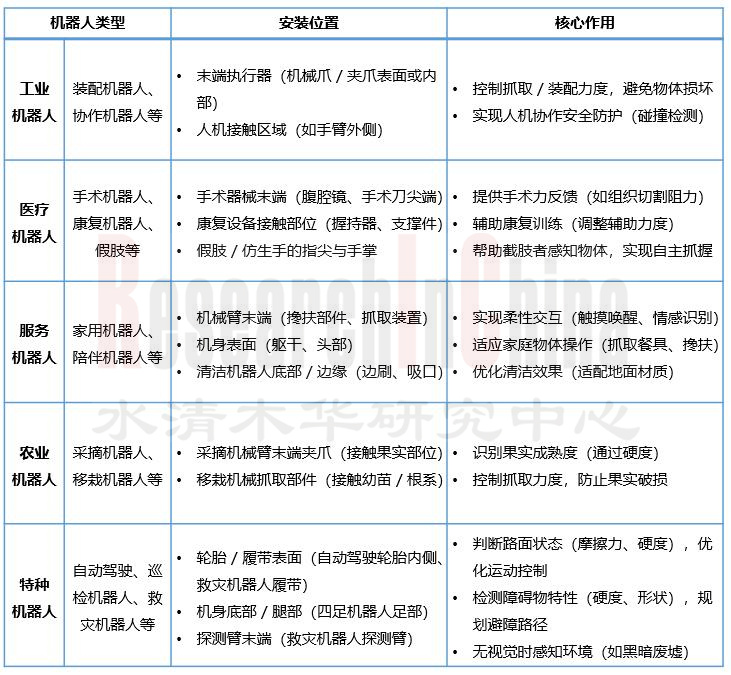
来源:佐思汽研《2025年触觉传感器研究报告》
触觉传感器在机器人的安装位置围绕 “物理交互核心区域”,核心作用是保障安全、提升操作精度。目前,触觉传感器在机器人领域主要应用于机械手末端、灵巧手指尖,部分已延伸至指腹、手掌,未来将应用于机械臂/手臂、下肢、躯干并覆盖全身。
机器人领域触觉传感器产品示例
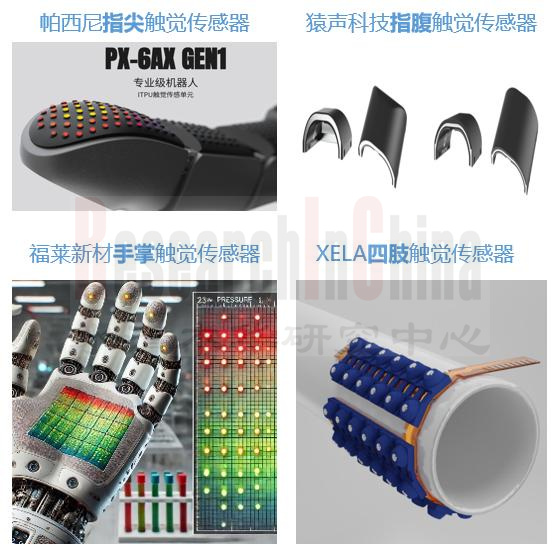
来源:企业官网、佐思汽研《2025年触觉传感器研究报告》
01 触觉传感器基本概念和技术
1.1 触觉传感器定义
1.2 触觉传感器产业链
1.3 触觉传感器技术原理
1.3.1 不同原理的触觉传感器概览
1.3.2 压阻式触觉传感器原理与优缺点
1.3.3 压阻式触觉传感器的核心:活性层及材料
1.3.4 电容式触觉传感器原理与优缺点
1.3.5 电容式三维力触觉传感器的结构与原理
1.3.6 压电式触觉传感器原理与优缺点
1.3.7 视触觉传感器原理与优缺点
1.3.8 视触觉传感器应用案例
1.3.9 磁电式(霍尔式)触觉传感器原理与优缺点
1.3.10 多模态集成式磁性触觉传感器,减少磁场对测量结果的影响
1.3.11 光电式触觉传感器原理与优缺点
1.3.12 不同原理的触觉传感器感知功能与性能对比
1.4 触觉传感器技术趋势与壁垒
1.4.1 多技术路线融合使触觉传感器具备多模态感知
1.4.2 触觉传感器柔性化是重要发展方向
1.4.3 触觉传感器的技术壁垒
1.5 触觉传感器的市场进入壁垒
1.6 触觉传感器的市场规模与竞争格局
02 触觉传感器的应用
2.1 触觉传感器在机器人领域的应用
2.1.1 触觉传感器在机器人领域的应用概述
2.1.2 触觉传感器在机器人领域的应用场景
2.1.3 不同原理的触觉传感器在机器人领域的应用场景
2.1.4 触觉传感器在机器人灵巧手上的应用
2.1.5 灵巧手触觉传感器产品汇总
2.1.6 搭载触觉传感器的灵巧手产品盘点
2.2 触觉传感器在电子皮肤上的应用
2.2.1 触觉传感器在电子皮肤上的应用概述
2.2.2 触觉传感器在电子皮肤中承担人体机械刺激感知的任务
2.2.3 触觉传感器在电子皮肤的“真皮层”
2.2.4 电子皮肤触觉传感器产品汇总
2.2.5 搭载触觉传感器的电子皮肤盘点
2.3 触觉传感器在汽车领域的应用
2.4 触觉传感器在汽车领域的应用示例
2.5 触觉传感器在工业自动化领域的应用
2.6 触觉传感器在智能家居领域的应用
03 国内触觉传感器供应商研究
3.1 国内触觉传感器供应商概况总览
3.2 国内触觉传感器供应商产品总览
3.3 汉威科技-能斯达
3.3.1 汉威科技-能斯达公司简介
3.3.2 汉威科技-能斯达柔性触觉传感器产品:柔性微压力传感器
3.3.3 汉威科技-能斯达柔性触觉传感器产品:薄膜压力传感器
3.3.4 汉威科技-能斯达柔性触觉传感器产品:柔性压力传感器
3.3.5 汉威科技-能斯达柔性触觉传感器产品:柔性压电传感器
3.3.6 汉威科技-能斯达柔性触觉传感器产品:柔性电容传感器
3.3.7 汉威科技-能斯达柔性触觉传感器产品:柔性热敏传感器
3.3.8 汉威科技-能斯达柔性触觉传感器产品:柔性薄膜弯曲传感器
3.3.9 汉威科技-能斯达柔性触觉感知解决方案:机器人
3.3.10 汉威科技-能斯达柔性触觉感知解决方案:IoT
3.3.11 汉威科技-能斯达柔性触觉感知解决方案:医疗大健康
3.4 他山科技
3.4.1 他山科技公司简介
3.4.2 他山科技产品概览
3.4.3 他山科技触觉传感器产品
3.4.4 他山科技触觉感知解决方案
3.4.5 他山科技触觉产品应用案例
3.4.6 他山科技应对触觉传感行业痛点的解决方案
3.4.7 他山科技触觉技术:多功能层专利技术
3.5 赛感科技
3.5.1 赛感科技公司简介
3.5.2 赛感科技核心技术:纳米界面离电型电容
3.5.3 赛感科技触觉传感器产品
3.5.4 赛感科技人形机器人触觉方案
3.6 帕西尼科技
3.6.1 帕西尼科技公司简介
3.6.2 帕西尼科技自主研发的ITPU多维度触觉传感技术
3.6.3 帕西尼科技产品概览
3.6.4 帕西尼科技触觉传感器产品
3.7 墨现科技
3.7.1 墨现科技公司简介
3.7.2 墨现科技发展战略
3.7.3 墨现科技机器人领域主要产品
3.7.4 墨现科技触觉传感器产品
3.8 戴盟机器人
3.8.1 戴盟机器人公司简介
3.8.2 戴盟机器人触觉传感器产品
3.9 埔慧科技
3.9.1 埔慧科技公司简介
3.9.2 埔慧科技触觉传感器产品
3.10 福莱新材
3.10.1 福莱新材公司简介
3.10.2 福莱新材柔性触觉传感器产品总览
3.10.3 福莱新材柔性触觉传感器产品:机器人触觉传感器
3.11 纽迪瑞
3.11.1 纽迪瑞-公司简介
3.11.2 纽迪瑞触觉传感器应用:机器人
3.11.3 纽迪瑞触觉传感器应用:汽车智能座舱
3.12 钛深科技
3.12.1 钛深科技公司简介
3.12.2 钛深科技触觉感知技术
3.12.3 钛深科技触觉传感器产品
3.13 千觉机器人
3.13.1 千觉机器人公司简介
3.13.2 千觉机器人触觉传感器产品
3.14 纬钛机器人
3.14.1 纬钛机器人公司简介
3.14.2 纬钛机器人触觉传感器产品
3.15 猿声科技
3.15.1 猿声科技公司简介
3.15.2 猿声科技触觉传感器产品
04 国外触觉传感器供应商研究
4.1 国外触觉传感器供应商概况总览
4.2 国外触觉传感器供应商产品总览
4.3 Tekscan
4.3.1 Tekscan公司简介
4.3.2 Tekscan传感器产品总览
4.3.3 Tekscan触觉传感器产品(
4.3.4 Tekscan传感器产品在机器人和汽车领域的典型应用案例
4.4 XELA
4.4.1 XELA公司简介
4.4.2 XELA触觉传感器产品
4.4.3 XELA灵巧手触觉感知应用案例
4.5 JDI
4.5.1 JDI公司简介
4.5.2 JDI传感器产品概览
4.5.3 JDI触觉传感器产品
4.6 Novasentis
4.6.1 Novasentis公司简介
4.6.2 Novasentis核心技术
4.6.3 Novasentis触觉传感器产品
4.7 Brighter Signals
4.7.1 Brighter Signals公司简介
4.7.2 Brighter Signals触觉感知技术
4.7.3 Brighter Signals触觉技术行业应用
4.8 PPS
4.8.1 PPS公司简介
4.8.2 PPS触觉传感器产品
4.8.3 PPS机器人触觉解决方案
4.9 Baumer
4.9.1 Baumer公司简介
4.9.2 Baumer触觉传感器产品
4.10 GelSight
4.10.1 GelSight公司简介
4.10.2 GelSight发展历程
4.10.3 GelSight触觉传感器产品
4.11 SynTouch
4.11.1 SynTouch公司简介
4.11.2 SynTouch触觉传感器产品