佐思汽研通过对 15 家主机厂(含 8 家国内、7 家国外)及 9 家 Tier 1 企业(涵盖芯片、激光雷达、域控及 ADAS Tier 1 等领域)的深入调研,围绕两大群体的 L3 智驾核心布局展开分析:对主机厂,全面梳理其 L3 智能汽车发展战略、重要落地节点、首款 L3 车型,以及传感器硬件方案、智驾芯片选型、技术路径规划、冗余策略设计;对 Tier 1 企业,则重点挖掘其 L3 智驾相关产品的研发与落地进展。基于上述研究,最终总结出中国市场 L3 智驾未来 3 年的八大发展趋势。
目前,城市NOA已下探至 15 万元车型,竞争壁垒消失,行业同质化加剧,此时 L3 级成为车企争夺用户、实现品牌向上的关键突破口 —— 唯有突破 L3,才能满足用户对 “更省心、更安全” 的高阶需求,建立差异化优势。L3 不仅是技术硬实力的试金石,更是品牌价值的放大器。作为迈向真自动驾驶的关键一步,L3 需攻克监管合规、先进传感融合等难题,其可靠性直接体现车企技术功底;率先量产L3的车企,能快速树立 “技术领先”“高端智能” 标签,带动全系车型价值提升,拉开与竞品差距。
以吉利极氪为例,其智驾进阶路径清晰指向 L3:2023年12月发布全栈自研智驾系统,实现高速 NOA 与 APA;2024年12月全量推送无图城市NOA;2026年6月将落地车位到车位(D2D)功能,而向 L3、L4 级突破,正是其下一步技术演进的核心方向。
趋势一:消费者对更高阶智驾功能的需求正在重塑市场结构,33%的消费者希望将城市NOA升级至L3/L4功能
从新上市车辆数据来看,2023-2025年国内乘用车智能驾驶装配格局呈现显著分化。L2.5/L2.9 级高阶智驾功能实现跨越式增长,L1-L2 + 级传统智驾功能则持续退坡,清晰折射出行业智能化迭代的加速态势。2023年时,L2.5、L2.9 级智驾仍属市场小众配置,新上市车型中的装配率仅为4.57%和3.3%;但到2025年1-4 月,这两项数据均实现爆发式增长:搭载L2.5级智驾的新车占比飙升至34.8%,L2.9级更是达到34.82%,展现出极强的市场渗透力。与之形成鲜明对比的是,L1-L2 + 级传统智驾功能的装配率在此期间持续走低。这一分化趋势清晰表明,消费者对更高阶智驾功能的需求偏好已开始重塑市场供给结构,高阶智驾正逐步成为新车市场竞争的核心焦点。
推动这一趋势的核心动力,源于城市 NOA与高速 NOA 功能的加速落地。这两类功能不仅是自动驾驶技术从 “概念” 走向 “实用” 的关键载体,更承担了 “消费教育” 的重要角色 —— 通过日常通勤、长途驾驶等高频场景,让消费者直观感知高阶智驾的价值,逐步建立对技术的认知与信任;而 “实际使用 - 产生满意 - 渴望升级” 的需求闭环,又进一步催化了用户对更高阶智驾的期待。
与此同时,随着用户与 ADAS 系统长期 “共处”,他们既逐步摸清了现有智驾的能力边界,也积累了基础信任;但 L1-L2 级智驾的功能天花板(如难以应对复杂城市路况)愈发明显,这一局限正持续推动用户需求向更高阶智驾转移。
麦肯锡《2025 中国汽车消费者洞察》调研数据,则直接印证了 “技术渗透 - 消费认可” 的正向循环。相较 2023 年,消费者对自动驾驶功能的接受度、满意度均显著提升;具体到核心功能,2024 年有 46% 的用户对当前城市 NOA 表示满意,更有 33% 的城市NOA用户明确希望将现有城市 NOA 升级至 L3/L4 级别。
趋势二:从供给侧来看,L3窗口期明确,多家国内主机厂将2025-2027年列为L3自动驾驶量产上车的关键阶段,硬件预埋成主流策略
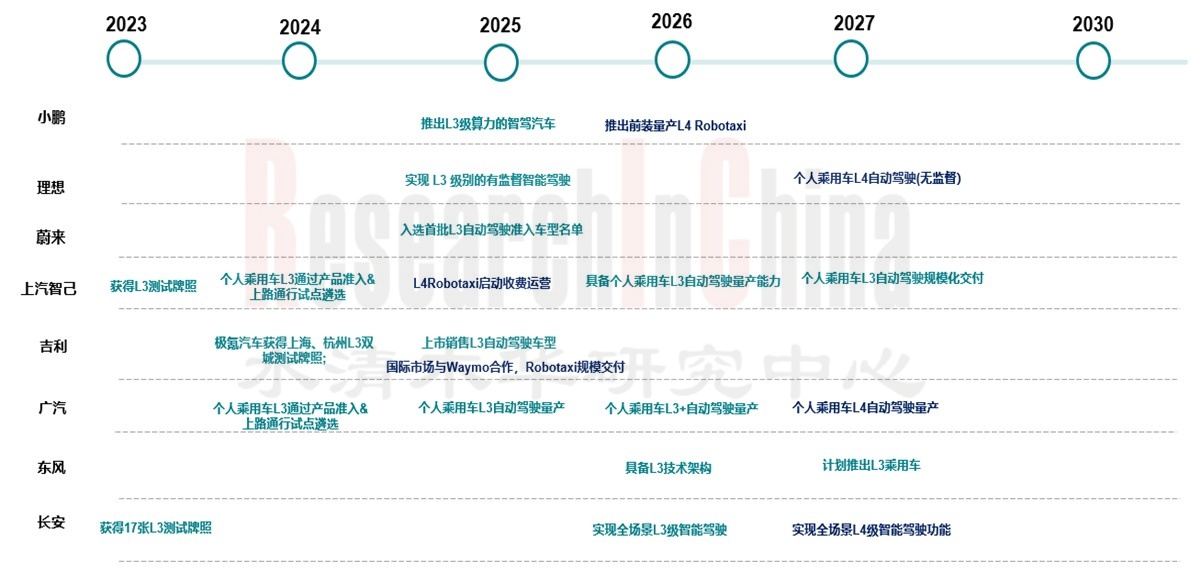
从供给侧看,L3 自动驾驶商业化窗口期已明确,蔚来、小鹏、吉利、华为系车企等头部主机厂均将2025-2026年列为量产关键期,硬件预埋成为行业主流策略—— 通过提前搭载激光雷达、高算力芯片等组件,为后续法规松绑后快速激活功能 “占坑”,抢占先发优势。
其商业化落地遵循 “高速→城区”“封闭→开放”“B 端→C 端” 的清晰路径,政策破冰与成本下探构成双重引擎:2025年北京、上海已明确高速 L3 事故责任划分,华为、小鹏等企业的高速 L3 功能随量产车交付;激光雷达等硬件成本大幅下探,则为技术普及铺路。其中,高速场景因道路结构化程度高、法规易统一,成为 L3 率先落地的 “试验田”。
C 端市场虽仍需突破用户信任与成本敏感瓶颈,但随着产业链成熟,预计未来 3 年 L3 车型将切入中端价格带。而多家主机厂2025-2026年的集中量产动作,标志着 L3 技术已从 “测试验证” 迈入 “规模化商业落地” 新阶段。
L3自动驾驶技术即将迎来市场爆发期,各大车企纷纷布局
来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
趋势三:双线布局 L3 与 L4:车企的技术协同与生态卡位战
部分头部车企双线押注 L3 与 L4,本质是技术、资本与战略层面的深度绑定。通过技术双向赋能与商业长短互补,构建难以复制的竞争壁垒。
技术层面,L3 与 L4 形成 “共生进化” 闭环。二者在激光雷达、高阶智驾芯片等硬件及车规级冗余设计上高度通用,核心能力互通:L3 量产车可海量收集 “接管” 场景等边缘案例数据,成为 L4 算法的 “训练库”;而 L4 的高阶算法经场景限定后降维下放,又能直接提升 L3 的性能可靠性。这种 “数据反哺 + 技术下沉” 的协同,让两条技术线实现 1+1>2 的迭代效率。
商业层面,二者构成 “短期造血 + 长期占位” 的生态组合。L3 通过私家车销售快速回笼资金、验证市场,为 L4 研发输血;L4 则瞄准 Robotaxi 万亿级市场,布局未来出行生态。更关键的是,私家车与 Robotaxi 车队可共享高精地图、云平台等资源,形成运营协同;而率先攻克 L4 的车企,将有望成为未来出行生态的定义者。这种双线策略,既是降低技术研发风险的务实选择,更是抢占智驾时代话语权的战略布局。
双线布局 L3 与 L4策略是技术、资本和战略层面的多重考量

来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
趋势四:L3 技术路径呈现“三足鼎立”格局:自研、共研+自研双轨、外部供应商
国内 L3 智驾技术路径已形成 “全栈自研、混合共研、外部合作” 的三足鼎立格局,这本质是车企基于技术储备、资金实力与战略节奏的差异化选择 —— 在 “技术主权” 与 “商业效率” 间寻找最优平衡点。
全栈自研型:以高投入换长期技术护城河
蔚小理、吉利等头部车企锚定全栈自研,核心是掌控底层硬件(如自研芯片适配)与顶层算法(端到端大模型)的全链路主导权。这种模式能构建独家数据闭环,通过量产车持续收集 “接管” 场景等边缘数据反哺算法迭代,形成难以复制的技术壁垒。但代价高昂,且要承担技术试错与周期风险。

来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
混合共研型:平衡自主可控与研发效率
上汽智己与 Momenta 共研、东风岚图 “分品牌施策”(泰山自研 + 梦想家搭华为方案)等案例,代表了混合路线的灵活性。其核心逻辑是 “核心自研或共研+ 非核心外包:车企掌控决策算法等关键环节,将感知融合、数据标注等重资产环节交由专业伙伴,既避免全自研的资源浪费,又摆脱单一依赖风险。这种模式已成为多数传统车企的优选,如比亚迪在自研 “天神之眼” 的同时,联合 Momenta 落地高阶功能。
采用共研+自研双轨模式代表主机厂

来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
采用外部供应商型:借成熟方案实现快速卡位、缩短 L3 研发周期
以华为系合作为典型,这类模式通过 “打包方案” 快速切入市场。华为凭借 ADS 4.0 系统的 “芯片 - 算法 - 冗余架构” 一体化输出,覆盖>7 家主机厂。赋能江淮尊界 S800,落地高速 L3 智驾,打造旗舰级智能车型。
趋势五:高线数激光雷达成为主机厂布局L3级智驾,保证安全冗余的重要选择
全球 L3 级智驾传感器方案呈现明确分化:仅特斯拉、小鹏坚持纯视觉路线,其余国内外主流主机厂及试点厂商均以激光雷达为核心配置; 国内包括华为系车企、吉利、广汽、上汽智己、蔚来等;国外如已试点 L3 的宝马、奔驰、本田,及未上路测试的欧美大厂。
奔驰 CTO Markus Schäfer 指出,L3 需多传感器冗余保障安全,且车速提升后,需更高性能激光雷达实现远距离微小障碍物探测,为系统与驾驶员预留充足处理时间。卓驭科技 AI 首席技术官陈晓智也强调,L3 硬件安全冗余需传感器互补(非单纯依赖算法),激光雷达的核心价值正是提供安全冗余。
线数作为激光雷达分辨率的核心指标(代表垂直激光束数量),其演进直接匹配智驾等级升级:早期 16 线适配低速场景,32/64 线服务中低阶 ADAS,当前128 线成主流车规方案;而 L3 车型需≥128 线,主流配置已升级至 192线、520线甚至700线,高线数带来的稠密点云,能实现170 米外微小障碍物的精准识别,正是 L3 责任转移场景下的安全必需。
部分布局L3智驾的主机厂采用的激光雷达线数对比

来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
趋势六:L3 级智能驾驶算力需求呈指数级跃升,1000TOPS 成主流门槛
智驾算力需求并非盲目堆砌,而是与级别、场景、算法模型深度绑定。L2 级应对车道保持、自适应巡航等基础场景,≥50TOPS 稠密算力已足够,过度堆砌只会造成资源浪费与成本虚高。
L3 级因需承担主要驾驶责任,需应对城区复杂交通、多类交通参与者、动态环境变化等场景,需大规模神经网络模型进行实时推理,端到端大模型参数扩大导致车端算力需求更高,将端到端技术与 VLM 二合一成为 VLA 后,车端模型参数变得更大,既要有高效实时推理能力,同时还要有认识复杂世界并给出建议的能力,部署 VLA 模型对车端芯片硬件会有相当高的要求,稀疏算力需求直接跃升至1000-2000TOPS级别,稠密算力门槛升至≥200TOPS。
场景不同,稀疏加速比有所差异。高速等结构化道路有效信息占比超 50%,稀疏度低,加速比仅 2-3 倍,等效算力 400-600TOPS 即可满足;而城市复杂路况的长尾场景有效信息占比不足 10%,稀疏度高,加速比可达 8-10 倍,等效算力能提升至 1600-2000TOPS,精准匹配复杂环境的算力需求。
不同智能驾驶等级车端算力要求

图片来源:华为
趋势七:端云协同,布局L3 智驾突破算力桎梏的核心架构
“端云协同” 已成为布局 L3 级智驾主流车企突破算力的共识性选择,其本质是通过云端筑能力、车端落应用的分工,破解大模型性能需求与车端算力限制的核心矛盾,小鹏的技术实践正是这一路径的典型范本。
技术底层逻辑由规模法则(Scaling Law)驱动:参数量与数据量直接决定模型性能,但车端算力难以支撑百亿级大模型运行。小鹏团队通过训练 10 亿至 720 亿参数模型、投喂 2000 余万条视频数据,首次验证该法则在自动驾驶 VLA 模型中持续生效 ——720 亿参数的云端大模型能精准处理复杂场景,再经蒸馏技术生成适配车端的小模型,可最大限度保留核心能力,突破算力桎梏。
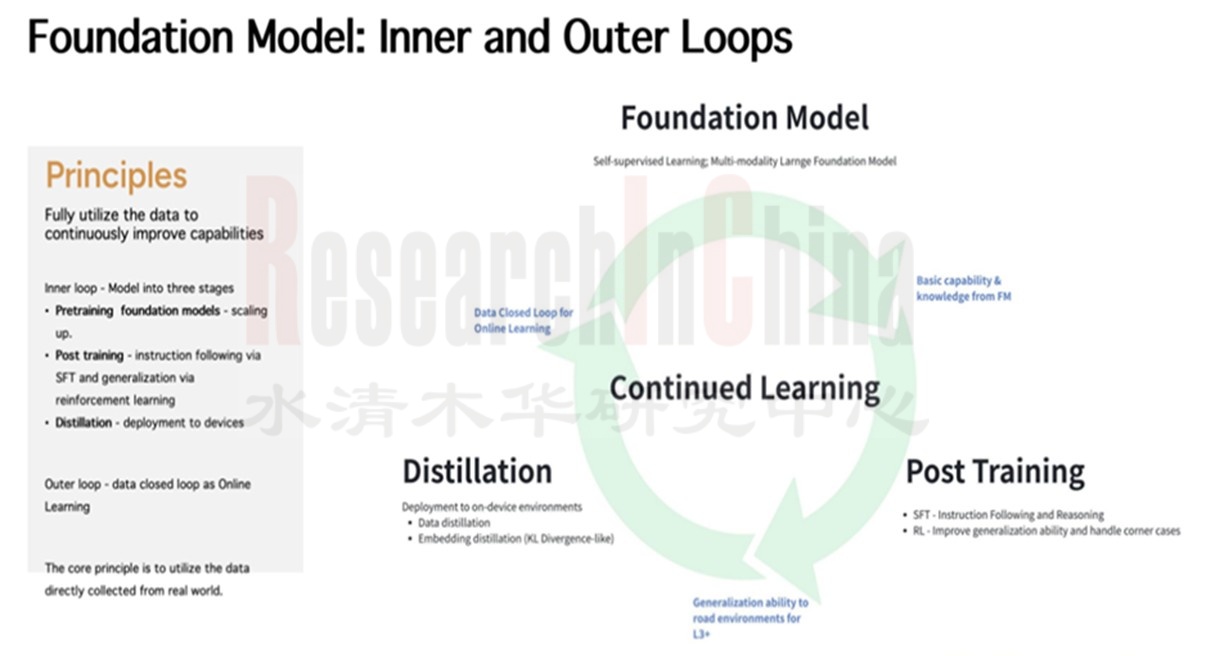
2025年4月发布的 “小鹏世界基座模型”,正是这一逻辑的落地载体。作为跨终端的 “超级母体”,它通过小鹏打造的 “云端模型工厂” 实现全链路生产:从多模态预训练、强化学习后训练,到模型蒸馏、车端部署形成闭环,依托万卡智算集群将迭代周期压缩至平均 5 天一次。

来源:小鹏
其进化核心在于 “双 Loop 协同机制”:Inner Loop 通过 “预训练 - 强化学习 - 蒸馏” 三阶段,完成大模型能力向车端的高效迁移;Outer Loop 依托真实车辆的感知数据、用户反馈及极端案例,持续反哺云端模型迭代,彻底解决仿真与真实场景脱节问题。这种 “云端训智、车端用智、数据回智” 的闭环,既让车端小模型具备接近大模型的泛化能力,又实现智驾系统的持续自进化,为 L3 的安全落地与向 L4 进阶奠定了技术基础。
来源:小鹏
趋势八:L3智驾迈向端到端 2.0,VLA 成 L3 智驾突破体验瓶颈的主流路线之一
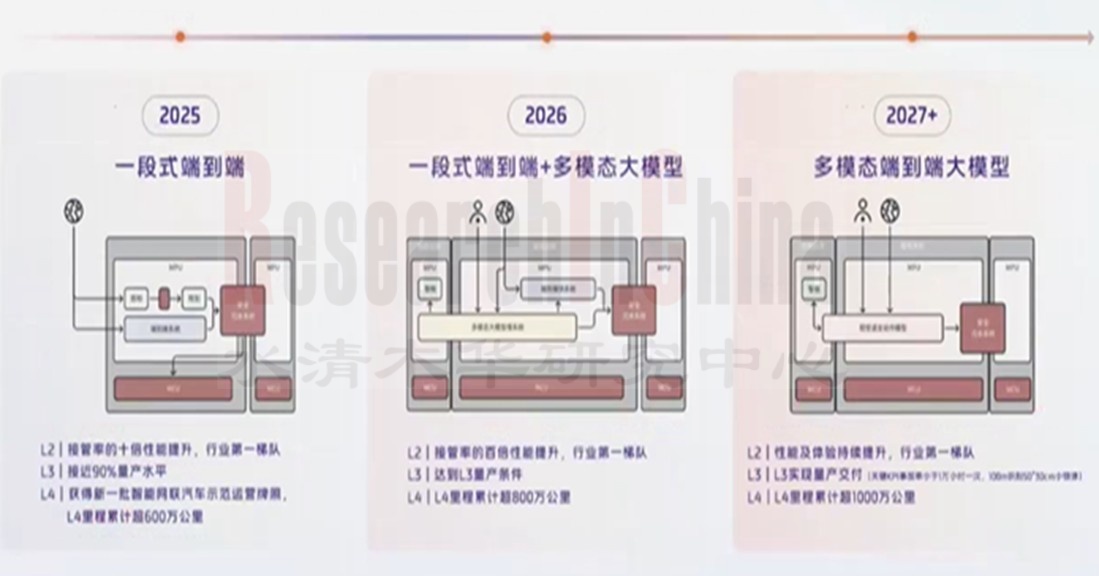
L3 智驾正从 “模块化拼接” 迈向 “端到端 2.0” 时代,核心演进逻辑是多模态融合深化——“VLA(视觉 - 语言 - 动作模型)+ 端云协同 + 世界模型” 的组合,正成为突破技术局限、实现商业化落地的主流路径。上汽智己的三阶演进路线,精准具象了这一从 “技术可用” 到 “体验可靠” 的跃迁过程。
•2025 年是 “基础筑基期”:通过落地一段式端到端(E2E)架构,打破传统感知、决策、控制的模块壁垒,实现信息无损传输与全局优化,L3 技术成熟度已达 90% 量产水平。这一步解决了模块化系统 “信息损耗、累计误差” 的核心痛点,为高阶智驾筑牢底层能力。
•2026 年进入 “能力跃升期”:在端到端基础上引入多模态大模型(E2E+VLM) ,让系统具备初步的场景语义理解能力 —— 可融合视觉感知、语音指令与地图信息做决策,而非单纯依赖传感器数据。这一升级直接补齐了 L3 商业化的关键短板,使其满足 “高可靠性” 的量产条件。
•2027年及以后迈向 “终极形态期”:进化为全链路多模态端到端(VLA) ,实现从多模态输入到驾驶动作输出的 “一站式” 闭环。模型能同时识别交通标识、理解用户指令、分析复杂路况,输出类人类的连贯决策,达成 “低接管、高信任” 的核心用户价值。
智己的演进路径印证了行业共识:L3 的落地不仅是算力与传感器的堆砌,更是架构逻辑的迭代 —— 从单一模态的 “执行自动化”,走向多模态融合的 “认知智能化”,而 VLA 正是这一进程的终极载体。
上汽智己端到端大模型的演进规划
来源:上汽智己
主流车企L3布局采用的端到端大模型方案对比
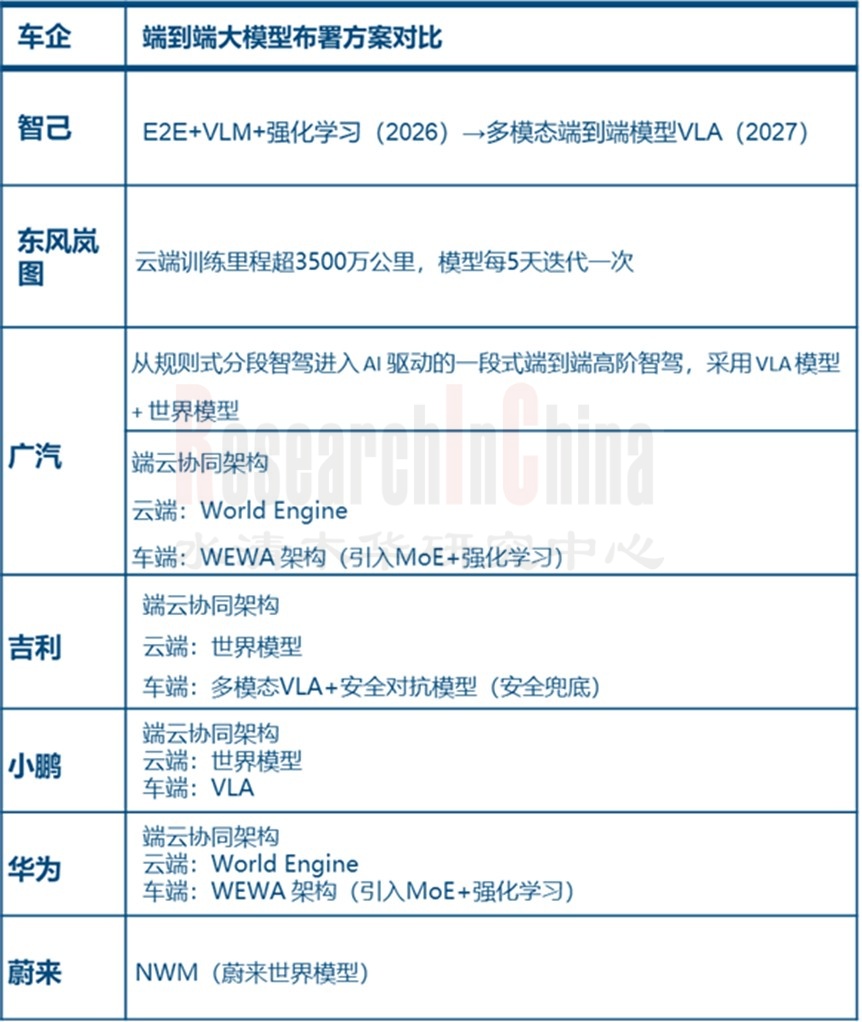
来源:佐思汽研《2025主机厂与Tier 1 厂商L3智能驾驶技术前瞻研究》
从消费需求的迭代到供给侧的战略卡位,从技术路径的分化到硬件算力的升级,L3 级智能驾驶的八大发展趋势,本质是行业从 “智能化 1.0” 向 “智能化 2.0” 跃迁的全景缩影。它不再是单一技术的突破,而是 “需求 - 技术 - 商业 - 生态” 多维度协同的系统工程。未来,L3 不仅是车企突破同质化、实现品牌向上的 “核心武器”,更将成为连接 L2 普及与 L4 生态的 “关键桥梁”。当 2025-2027 年量产车型密集落地,当高速场景的法规红利向城区延伸,L3 级智驾将不再是 “高端配置” 的代名词,而是重塑汽车价值定义、开启智慧出行新生态的 “引爆点”。
01 L3有条件自动驾驶商业化进展及政策解读
1.1 L3级有条件自动驾驶的定义与分级标准
L3智驾国际分级标准:SAE J3016 (1)
L3智驾国际分级标准:SAE J3016 (2)
中国国家标准(GB/T 40429-2021):L3有条件自动驾驶定义、L3系统满足要求、用户角色解读
L3智驾与L2辅助驾驶的差异(1)
L3智驾与L2辅助驾驶的差异(2)
L3智驾与L2辅助驾驶的差异(3)
L3智驾与L2辅助驾驶的差异(4):“系统驾驶”与“驾驶员接管”的责任流转逻辑
L3智驾与L2辅助驾驶的差异(5):驾驶员状态监控系统1
L3智驾与L2辅助驾驶的差异(5):驾驶员状态监控系统2
L3智驾与L2辅助驾驶的差异(5):驾驶员状态监控系统
L3自动驾驶系统方案概念设计(1):运行设计域
L3自动驾驶系统方案概念设计(2):核心功能场景
自动驾驶安全评估全流程体系:自动驾驶功能启动过程安全性评估
自动驾驶安全评估全流程体系:自动驾驶功能运行过程安全性评估
1.2 L3级有条件自动驾驶国家法规政策详解
L3有条件自动驾驶法规政策解析:国家层面法规与政策概览(1)
L3有条件自动驾驶法规政策解析:国家层面法规与政策概览(2)
L3有条件自动驾驶法规政策解析:地方试点政策与实践
武汉、北京、深圳政策对比:L3 交通事故责任界定
武汉、北京、深圳政策对比:L3 上路流程
《汽车行业稳增长工作方案(2025—2026 年)》,明确“有条件批准 L3 级车型生产准入”
首批进入L3智能网联汽车准入和上路通行试点9家车企
首批L3有条件自动驾驶准入车型名单
中国L3级有条件自动驾驶法规:《四部委关于开展智能网联汽车准入和上路通行试点工作的通知》解读(1)
中国L3级有条件自动驾驶法规:《四部委关于开展智能网联汽车准入和上路通行试点工作的通知》解读(2)
中国L3级有条件自动驾驶法规:《四部委关于开展智能网联汽车准入和上路通行试点工作的通知》解读(3)
中国L3级有条件自动驾驶法规:《四部委关于开展智能网联汽车准入和上路通行试点工作的通知》解读(4)
L3 有条件自动驾驶保险相关法律法规、政策及标准汇总
1.3 L3级有条件自动驾驶国家标准解析
国标智能网联汽车自动驾驶系统通用技术要求解读
GB/T 44721-2024 中 ADS 动态驾驶任务后援的安全兜底流程解析
GB/T 44721-2024 中 人机交互:ADS的“激活”逻辑
GB/T 44721-2024 中 人机交互:ADS的“退出”与“干预”逻辑
GB/T 44721-2024 中 人机交互:ADS系统不同状态的核心提示
中汽协发布L3有条件自动驾驶事故界定及数据协作技术规范
GB 44497-2024标准解读(1):自动驾驶数据记录系统是事故鉴定不可或缺的技术依据
GB 44497-2024标准解读(2):自动驾驶数据记录 Ⅰ 型与 Ⅱ 型系统全维度对比
GB 44497-2024标准解读(3):“事件触发式”数据记录全链路
GB 44497-2024标准解读(4):“实时连续记录”数据记录全链路
1.4 全球自动驾驶政策法规
全球自动驾驶行业迎来实质性政策推动
捷克成为继德国之后欧洲第二个允许L3自动驾驶在公共道路行驶的国家
全球L3/L4级自动驾驶法规:日本《道路交通法》允许L4自动驾驶汽车和自动驾驶机器人上路
全球L3/L4级自动驾驶法规:日本自动驾驶环境建设措施
全球L3/L4级自动驾驶法规:日本自动驾驶发展目标
全球L3/L4级自动驾驶法规:日本RoAD to the L4 项目
1.5 L3 落地的核心门槛:自动驾驶冗余系统的设计与价值
各级别自动驾驶对失效的应对模式
单通道系统对于L3自动驾驶来说有严重的安全隐患
设计合理的冗余架构可强化L3系统的整体性能与安全属性
L3 自动驾驶从单通道架构转向多通道架构
L3自动驾驶系统方案概念设计:通信冗余
L3自动驾驶系统方案概念设计:电源冗余方案解析(1)
L3自动驾驶系统方案概念设计:电源冗余方案解析(2)
L3自动驾驶系统方案概念设计:控制器冗余
L3自动驾驶系统方案概念设计:执行器冗余(1)
L3自动驾驶系统方案概念设计:执行器冗余(2)
L3智驾冗余
02 L3厂商智驾技术路线对标与行业演进趋势研判
国际智驾市场分析及L3市场渗透率预测
L2-L5各级别自动驾驶2025-2035年在中国市场及全球市场的渗透率预测
L3有条件自动驾驶的推动力分析(1)
L3有条件自动驾驶的推动力分析(2)
消费者对更高阶智驾功能的需求正在重塑市场结构
L3有条件自动驾驶的落地带来的商业新增量(1)
L3有条件自动驾驶的落地带来的商业新增量(2)
2025-2030,L3在中国市场强劲增长,2035年中国市场L3 收入潜力有望达到70亿美元
政策 + 技术双轮驱动:2025-2030 中国 L3/L4 级自动驾驶市场驶入规模化商用快车道
四大技术模块的同步升级,共同推动自动驾驶从 L3 到 L5 的阶梯式落地
行业专家对L3有条件自动驾驶发展的预判(1)
行业专家对L3有条件自动驾驶发展的预判(2)
L3级及L4级智能驾驶发展节奏预估
规模化落地L3面临的五大挑战
L3落地面临技术挑战分析(1)
L3落地面临技术挑战分析(2)
L3落地面临技术挑战分析(3)
趋势一:窗口期明确,多家国内主机厂将2025-2027列为L3自动驾驶量产上车的关键阶段,硬件预埋成主流策略
国内车企布局L3呈现4大特点
趋势二:国际阵营L3 自动驾驶布局密集,正掀起一场智能化全球竞赛
趋势三:传感器厂商、算力平台、智驾算法供应商,协同推进 L3 规模化落地并向 L4 自动驾驶演进
趋势四:部分头部车企采取双线布局 L3 与 L4策略是技术、资本和战略层面的多重考量(1)
趋势四:部分头部车企采取双线布局 L3 与 L4策略是技术、资本和战略层面的多重考量(2)
趋势五:L3 技术路径呈现“三足鼎立”格局:自研、共研+自研双轨、外部供应商(1)
趋势五:L3 技术路径呈现“三足鼎立”格局:自研、共研+自研双轨、外部供应商(2)
趋势五:L3 技术路径呈现“三足鼎立”格局:自研、共研+自研双轨、外部供应商(3)
趋势六:高线数激光雷达成为主机厂布局L3级智驾,保证安全冗余的重要选择(1)
趋势六:高线数激光雷达成为主机厂布局L3级智驾,保证安全冗余的重要选择(2)
趋势七:L3 级智能驾驶算力需求呈指数级跃升,千 TOPS 成主流门槛(1)
趋势七:L3 级智能驾驶算力需求呈指数级跃升,千 TOPS 成主流门槛(2)
趋势八:智驾级别升级驱动“算力 - 数据 - 训练资源”需求阶梯式增长
趋势九:“端云协同”已成为绝大多数布局L3级别智能驾驶车企突破算力桎梏的核心架构
趋势十:L3智驾迈向端到端 2.0,车企集体押注“VLA+ 端云协同 + 世界模型”架构(1)
趋势十:L3智驾迈向端到端 2.0,车企集体押注“VLA+ 端云协同 + 世界模型”架构(2)
03 主机厂 L3 智能驾驶产品、技术前瞻
3.1 吉利-极氪
吉利汽车加速L3/L4布局:自主研发与战略生态合作双轮驱动
技术演进层面,L3级是极氪下一步突破的核心关键
L3突破的四大支柱:数据、AI 大模型、仿真技术与算力的协同闭环
极氪L3智能驾驶:硬件布局
极氪L3智能驾驶:端到端大模型
L2和L3及以上自动驾驶开发理念的差异
极氪9X光辉:极氪L3落地的首款车型
3.2 上汽-智己
智己汽车自动驾驶全栈布局策略
智己L3级自动驾驶技术发展规划
面向L2/L3/L4的技术底座:端到端大模型解析(1)
面向L2/L3/L4的技术底座:端到端大模型解析(2)
面向L2/L3/L4的技术底座:域控及传感器硬件配置
面向L2/L3/L4的技术底座:安全冗余
面向L2/L3/L4的技术底座:数字底盘(1)
面向L2/L3/L4的技术底座:数字底盘(2)
智己Robotaxi布局进展
3.3 小鹏汽车
小鹏L3布局规划
小鹏汽车:AI定义汽车转型布局
小鹏推出L3级算力的智驾汽车
小鹏世界基座模型(1)
小鹏世界基座模型(2)
小鹏世界基座模型(3)
小鹏云端工厂
首款搭载L3级算力平台的AI汽车——小鹏G7 Ultra
小鹏L4自动驾驶规划:2026正式推出前装Robotaxi
3.4 理想汽车
理想加速L3/L4布局,未来将向AGI进一步延伸
理想对L3有条件自动驾驶的理解
理想智驾技术路线演进:VLA有望走向高级别自动驾驶(1)
理想智驾技术路线演进:VLA有望走向高级别自动驾驶(2)
理想MindVLA核心技术
3.5 华为
华为L3/L4智驾在中国的落地规划
面对技术、商业闭环挑战,华为的破局解法
华为乾崑智驾全维安全体系 CAS 4.0
华为L3智驾:传感器硬件配置分析(1)
华为L3智驾:传感器硬件配置分析(2):高精固态激光雷达
华为L3智驾:传感器硬件配置分析(3):舱内激光视觉Limera
华为ADS 4.0(1):WEWA架构
华为ADS 4.0(2):WEWA架构
华为ADS 4.0(3):L3智驾版本与智能驾驶辅助版本对标
华为ADS 4.0(4):四个智驾版本对比
华为L3智驾:自研操作系统AOS+推出混合冗余架构构建自动驾驶安全底座
华为数字底盘引擎 XMC(1)
华为数字底盘引擎 XMC(2):核心优势拆解
华为智驾L3量产车型预估:搭载华为L3智驾功能的华为系车型列表及硬件价格配置
3.6 广汽
广汽L3/L4自动驾驶产品布局规划(1)
广汽L3/L4自动驾驶产品布局规划(2)
广汽Robotaxi布局
广汽算力集群建设
广汽ADIGO智驾系统的演进历程:2025推出L3智驾系统ADGO GSD
广汽L3智驾采用“自研为主+合作为辅”双轨策略
广汽智驾采取多品牌分层布局,加速智能化普及
广汽L3智驾技术方案
广汽L3智驾系统设计:全域安全技术
广汽L3智驾系统设计:八大关键系统双冗余设计
广汽L3智驾系统设计:主被动融合安全(1)
广汽L3智驾系统设计:主被动融合安全(2)
广汽L3智驾系统设计:电池安全
广汽L3智驾系统设计:智能底盘安全
广汽集团通过智能网联汽车准入和上路通行试点审批,成为全国首批获准开展L3自动驾驶上路通行试点的车企之一
3.7 岚图汽车
岚图L3智驾布局及重要节点
岚图L3智驾的技术架构:天元智架系统
岚图青云L3架构解析
岚图L3级智驾系统详解:硬件配置
鲲鹏L3级智能安全驾驶系统解析(1)
鲲鹏L3级智能安全驾驶系统解析(2)
3.8 长安汽车
长安北斗天枢 2.0 L3规划
长安领跑L3智驾准入名单
长安L3车型智驾方案
长安深蓝汽车L3重庆路测
长安L4 Robotaxi布局
3.9 宝马
宝马L3的布局
宝马未来出行开发中心(Future Mobility Development Center)
宝马Personal Pilot L3
Personal Pilot L3 ODD与地图绘制
Personal Pilot L3 冗余设计
宝马L3多模态传感器套件
宝马新一代EE架构
宝马新一代EE架构核心—四台高性能计算机“超级大脑”
宝马新EE架构其他设计
3.10 奔驰
奔驰致力于L3自动驾驶技术研发与升级
奔驰DRIVE PILOT 简介
奔驰DRIVE PILOT界定边界:运行设计域
奔驰DRIVE PILOT传感器配置
奔驰DRIVE PILOT冗余设计
奔驰 L3 其他设计
奔驰已形成L2、L3、L4多线并举的智驾路径
3.11 奥迪
奥迪L3界定边界:运行设计域(ODD)
奥迪L3核心计算架构—zFAS计算机平台
zFAS详细配置解读
奥迪L3传感器配置概览
奥迪L3传感器配置解析
奥迪L3底盘与执行器冗余
奥迪 L3 其他设计
3.12 Stellantis
Stellantis STLA AutoDrive 1.0
STLA AutoDrive L3级系统的技术
基础架构:STLA Brain
Stellantis 合作布局
3.13 本田
本田Honda SENSING Elite简介
本田L3界定边界:运行设计域(ODD)
本田L3自动驾驶系统的配置与各模块间的协作逻辑(1)
本田L3自动驾驶系统的配置与各模块间的协作逻辑(2)
本田L3冗余设计以及核心决策
本田L3传感器配置概览
本田L3算法与模型配置概览
本田L3未来战略
3.14 Rivian
RIVIAN L3 自动驾驶平台布局
RIVIAN L3 区域E/E架构
RIVIAN L3 传感器配置
RIVIAN L3 计算平台配置以及底盘控制
RIVIAN L3 软件算法设计—感知预测
RIVIAN L3 软件算法设计—规划
RIVIAN L3 其他设计
3.15 特斯拉
特斯拉未来战略转变
特斯拉AI5芯片参数
特斯拉双芯冗余到单芯集成的范式转变
AI5关键技术
FSD 模型训练流程发展方向
3.16 其他国外车企
其它车企L3规划布局一览
04 Tier 1 厂商L3智能驾驶产品、技术前瞻
4.1 英伟达
英伟达L3级自动驾驶全栈系统Alpamayo
Alpamayo技术演进路线
Alpamayo基本架构(1)
Alpamayo基本架构(2)
Alpamayo网络架构
Alpamayo模型训练流程表
Alpamayo模型训练流程详解
Alpamayo L3架构
Alpamayo L3架构冗余设计
Halos整体安全系统
4.2 地平线
地平线L3实现路径
地平线对智能驾驶各级别规模化发展的判断
地平线L3算力需求及产品
地平线L3量产方案
4.3 高通
高通Snapdragon Ride平台规划
高通旗舰级舱驾融合芯片平台8797
骁龙8797芯片参数配置
4.4 黑芝麻智能
黑芝麻智能华山A2000芯片简介
黑芝麻智能华山A2000芯片参数配置
黑芝麻智能华山A2000芯片架构
黑芝麻智能华山A2000内存架构
黑芝麻智能华山A2000通用AI工具链BaRT
黑芝麻智能华山A2000面向未来的设计
黑芝麻智能安全底座冗余设计
4.5 禾赛科技
禾赛科技L3方案—千厘眼B
千厘眼B ETX超远距激光雷达参数
ETX超远距激光雷达创新技术
千厘眼B 第二代固态激光雷达FTX参数
禾赛科技第四代芯片
4.6 速腾聚创
速腾聚创L3方案—EM4+E1
速腾聚创超长距激光雷达EM4参数配置
EM4激光雷达L3核心技术特点
速腾聚创补盲雷达E1参数配置
速腾聚创接收处理SOC芯片
速腾聚创L3方案应用案例
4.7 博世
博世L3发展规划
博世与CARIAD合作开发基于AI的L2/L3级自动驾驶软件栈
博世高阶辅助驾驶主流路径:一段式端到端(1)
博世高阶辅助驾驶主流路径:一段式端到端(2)
4.8 Mobileye
公司简介及产品组合
Mobileye从消费者使用的产品导向维度,将自动驾驶重新定义为四级
2025 年 L3级自动驾驶芯片将实现量产,推动高阶智驾技术规模化落地
Mobileye EyeQ6H vs. EyeQ5H 对比分析(1)
Mobileye EyeQ6H vs. EyeQ5H 对比分析(2)
Mobileye L1-L4全栈自动驾驶产品组合矩阵(1)
Mobileye L1-L4全栈自动驾驶产品组合矩阵(2)
Mobileye L3智驾产品的传感器硬件配置(高速/城市/乡村等场景)
L2/L3智驾产品量产客户、量产车型及目标市场对比
Mobileye Chauffeur算法架构解析
Mobileye产品演进路线规划图:预计在第二阶段CH(L3)产品将占据公司总营收的10%
Mobileye与大众合作发布其首款L4自动驾驶车辆(1)
Mobileye与大众合作发布其首款L4自动驾驶车辆(2)
4.9 卓驭科技
卓驭L3智驾落地时间规划
卓驭VLA大模型及L3/L4智驾规划
卓驭智驾产品演进趋势表
卓驭L3车载硬件产品布局:惯导三目及激光雷达总成
卓驭L3车载硬件产品布局:智能驾驶域控制器