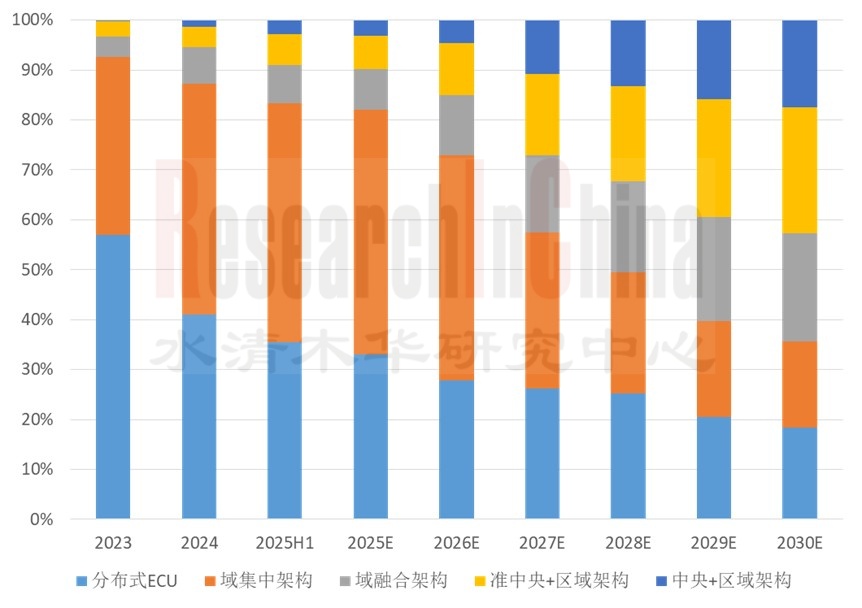
据佐思汽研统计,2025年上半年,域融合架构乘用车销量80.2万辆,占比7.6%;准中央+区域架构乘用车销量64万辆,占比6.1%;中央+区域架构乘用车销量29.9万辆,占比2.8%。预计到2030年,“准中央+区域”架构渗透率将达到25.2%,中央+区域架构渗透率将达到17.5%。
来源:佐思汽研《2025年智能汽车E/E架构和技术供应链搭建策略研究报告》
随着跨域融合、中央+zonal演进趋势下,OEM主机厂在全新电子电气架构、智能座舱、智能驾驶、智能动力传动与电驱动、智能底盘、智能热管理、智能车身电子等多维度推出全新的技术和产品体验。本报告将围绕这些新技术展开。
舱驾中央计算域架构:多种 “中央+Zonal” 计算架构形式,适配不同定位车型
随着 “中央+zonal” E/E架构逐渐成为主流,计算架构进一步向中央计算机(CCU)发展演进,主要形式包括以下四种类型:

来源:佐思汽研《2025年智能汽车E/E架构和技术供应链搭建策略研究报告》
小米YU7 四合一域控制器
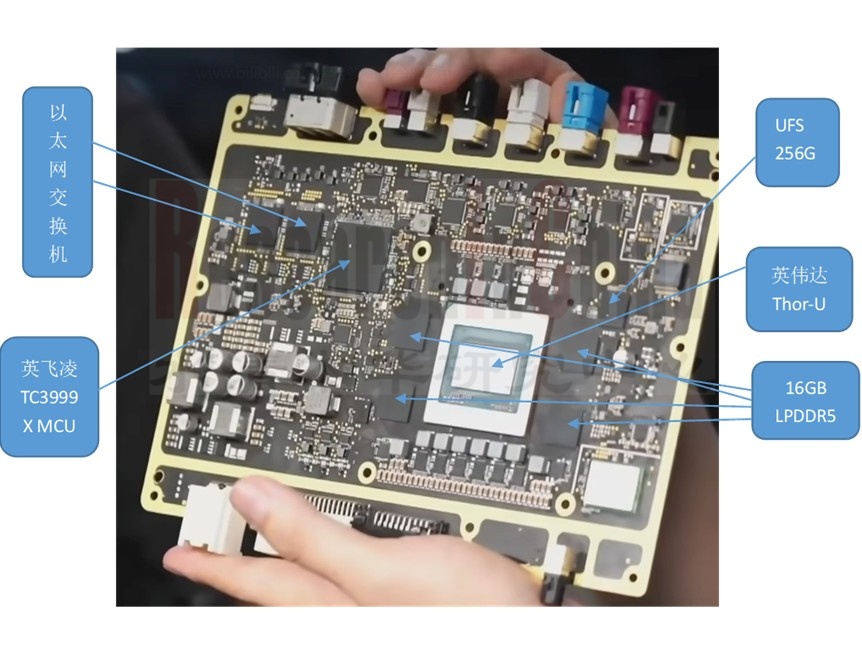
小米首款豪华高性能SUV“小米YU7”采用的电子电气架构(EEA)将传统分布式架构中的四大核心模块——整车域控制器(VCCD)、座舱域控制器(DCD)、辅助驾驶域控制器(ADD)及T-Box通讯模块,通过四合一集成技术整合为中央计算平台,集成到一块3.6kg的主板,体积缩57%,零件少75%,15分钟可完成OTA,哨兵模式功耗降40%,整车因此多跑16km。该设计采用高通4nm骁龙8Gen3座舱芯片和英伟达的Thor-U智驾芯片,支持毫秒级信号处理与多任务并行。
整个四合一域控模块包括两块板卡,一块是以高通骁龙8 Gen3为主的CDC板卡,一块是以英伟达Thor为主的ADAS板卡。两块板卡使用一套水冷结构壳体。整个传感器系统包括:1L1R11V12U,即1个激光雷达,1个4D毫米波雷达,4个环视,7个ADAS摄像头(2前1后4侧),12个超声波雷达。

来源:网络
小米YU7 整车、T-Box、座舱与智驾四合一控制器采用液冷散热设计,共有三块PCB板子,一块是高通骁龙8 Gen3核心板,实际就是手机板,采用处理器与LPDDR5 DRAM存储器SiP封装,一块座舱母板,一块智能驾驶PCB板。其中,座舱母板与高通骁龙8 Gen3核心板通过BTB板对板连接器平行覆盖在座舱母板一侧。
来源:网络
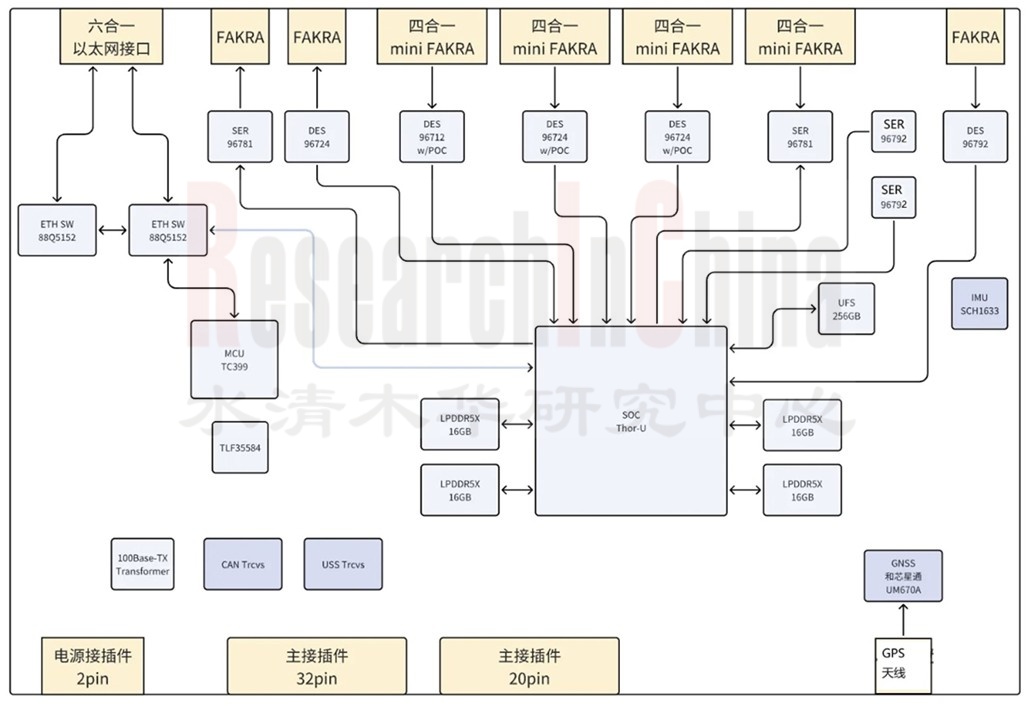
视频输入和输出部分,小米YU7最初设计的应该是使用5个800万像素摄像头加4个400万像素摄像头,因此设计了三个MAX96792解串行芯片,每个芯片可以对应两个高帧率800万像素摄像头输入,实际量产的时候,为了降低成本,改用2个800万像素,外加9个300万像素,再加一个300/500万像素的车内DMS摄像头,这样就只需要一个MAX96792,另外两个就没有外接。一个MAX96712对应车内DMS摄像头,三个MAX96724对应9个300万像素摄像头,实际可以对应400到500万像素。视频输出方面,有两路视频输出,都采用MAX96781做加串行。
来源:网络
英伟达智能驾驶芯片Thor-X最高支持128GB内存,Thor-U的CUDA核心和张量核心都减少大约1/3,CPU核心从14个减少到12个。
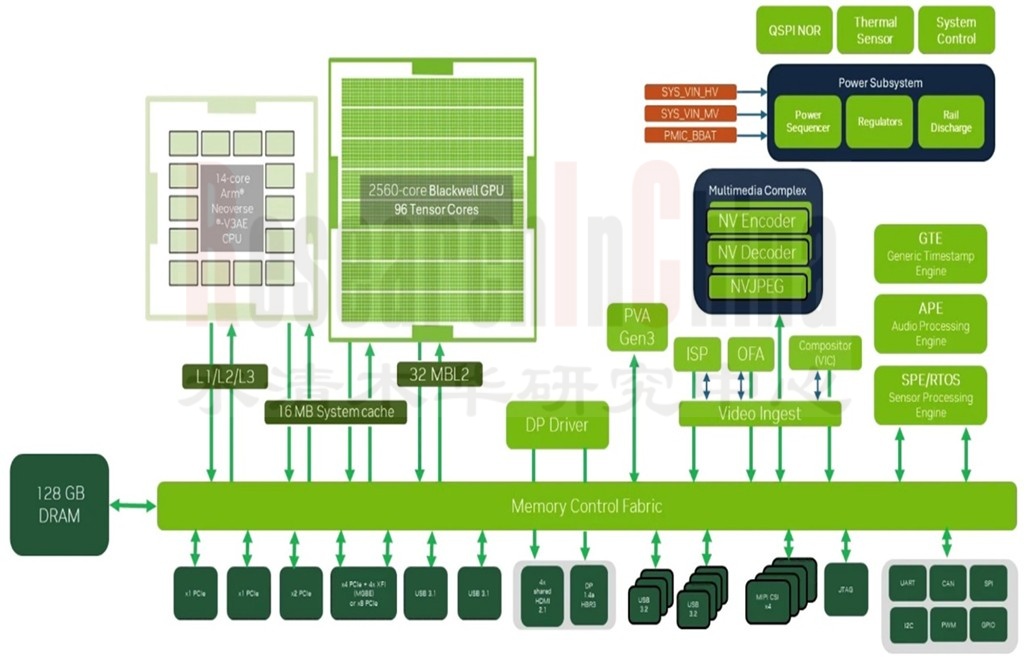
来源:英伟达
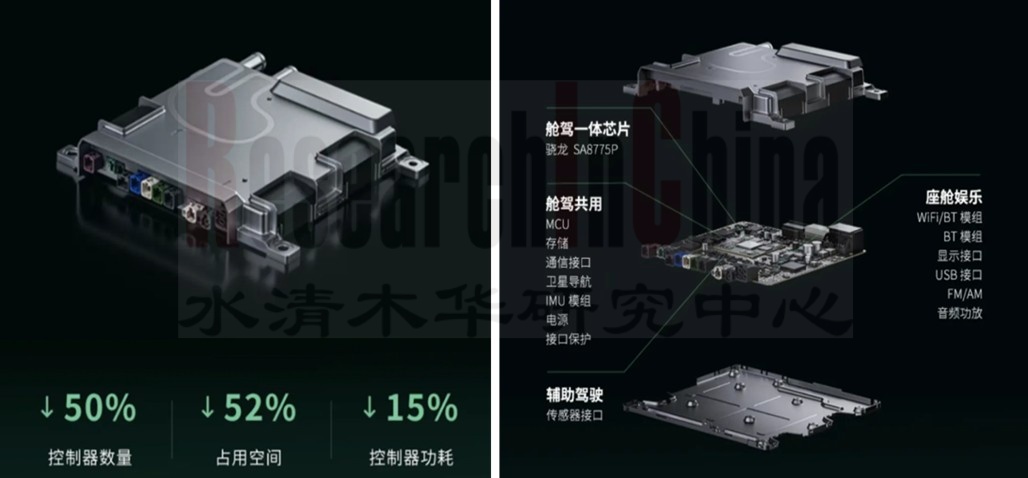
极狐阿尔法T5 SA8775P单芯片舱驾一体计算平台
2025年10月,SA8775P单芯片舱驾一体方案在极狐阿尔法T5上量产落地。与卓驭科技合作开发的SA8775P舱驾一体方案,将座舱与智能驾驶系统整合至单颗芯片,实现数据直接交互,缩短传输延迟并优化功耗。
软硬件系统层面:
•底层运行的是车规级 QNX 实时操作系统,负责智驾的所有控制链路;
•上层则通过虚拟化技术运行 Android 座舱系统,提供语音交互、影音娱乐等功能。两套系统,互不打扰。以前舱和驾之间要靠“翻译”交流,现在是直接面对面说话,链路更短、带宽更高、时延更低,交互会更跟手;
•一体化域控整机功耗约60W,分别采用两条水冷管路,进行降温冷却,以此满足芯片算力强但需极强散热的要求;
•舱驾融合方案使整车成本降低约30%,通过简化线束布局和硬件整合实现空间利用率提升,同时降低维护复杂度。
来源:北汽极狐
功能层面:
•智能驾驶功能:基于高通骁龙8775芯片打造,部署端到端大模型,实现城市NOA功能和跨层记忆泊车,支持城区和高速领航辅助、自动泊车辅助、跨层记忆泊车等功能,其关键子系统包括;
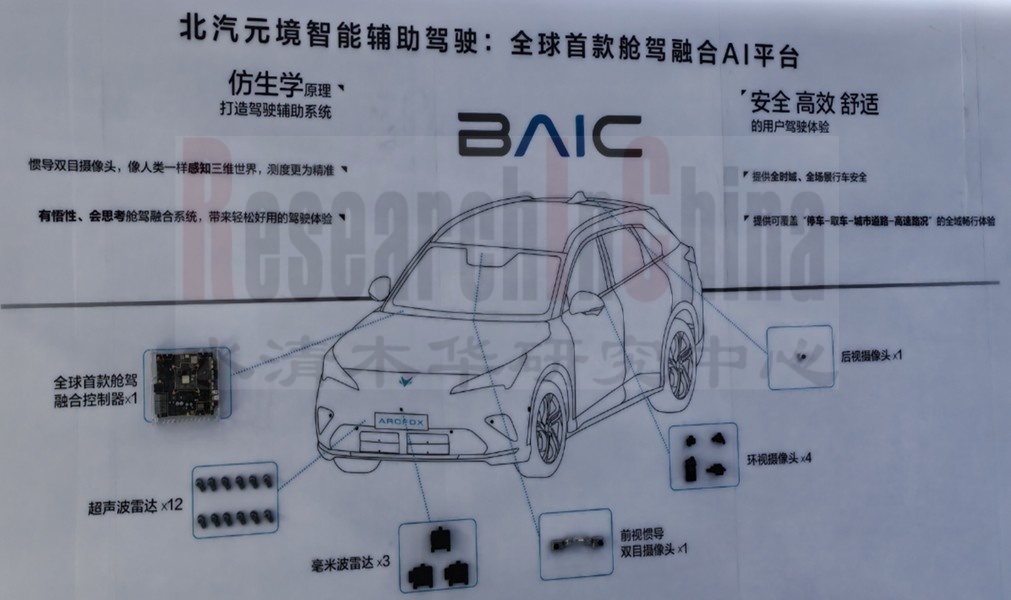
o卓驭“惯导双目™”系统:用两颗800万像素摄像头+一组IMU惯导模块,直接输出一张“像素密度超高的3D地图”,能精准还原周围环境,精度能到厘米级
o卓驭“高悟性端到端算法2.0”:感知、预测、规划、控制四合一,一个模型全包;能处理红绿灯识别、无保护左转、拥堵变道等高阶场景
o卓驭增强 OCC 动态障碍补全模块:不需依赖既定数据库,也可以检测和避让各种类型障碍物,在处理城市路口和复杂拥堵场景时更稳定
o数据训练模块:量产车每次 OTA 后还会回传部分驾驶数据至云端,用于模型再训练,已形成2.6亿视频片段和15亿帧原始图像
•座舱多模态大模型功能:可主动进行车内外全场景感知,提供智能便捷的情感化、个性化主动服务。借骁龙8775的强大性能支持超拟人的“智能对话”,为用户打造更智能的“出行伙伴”。
来源:北汽极狐
智能底盘域架构:跨域融合趋势下,AI智能底盘成为OEM主机厂关键卖点
AI智能底盘的本质是通过“传感器-算法-执行器”的协同,实现对车辆动态的“全场景管理”。通过多模态传感器(如摄像头、激光雷达、毫米波雷达、加速度传感器、悬架行程传感器等),实时采集“车身状态”数据(如俯仰角、侧倾角、车轮扭矩)与“道路环境”数据(如减速带、坑洼、湿滑路面),这些数据经过处理后能够让系统提前预判车身的姿态变化。
在不同的路况下,如坑洼泥地、碎石路面、湿滑路面、甚至是突发遇到的路面落物(石头、雪糕桶),悬挂系统的高度调节和阻尼调节能够起到的按需支撑、吸振甚至是防护的作用。实现悬挂的智能调节,预瞄系统是关键。不仅要看得远、更要看得清、看得细。
预瞄系统通过双目甚至三目摄像头或激光雷达对前方路况进行实时扫描,部分厂商还会建立云端路况数据层,将实时数据与云端数据进行综合分析。
部分OEM主机厂AI智能底盘

来源:佐思汽研《2025年智能汽车E/E架构和技术供应链搭建策略研究报告》
2025年7月,小鹏汽车发布了“太极AI底盘”。其通过智能感知、云端协同与自学习算法三位一体的控制架构,在感知-决策-执行链路上形成高度协同闭环,实现舒适性动态响应,为电动SUV在复杂城市环境中提供了远超传统底盘的体验提升。
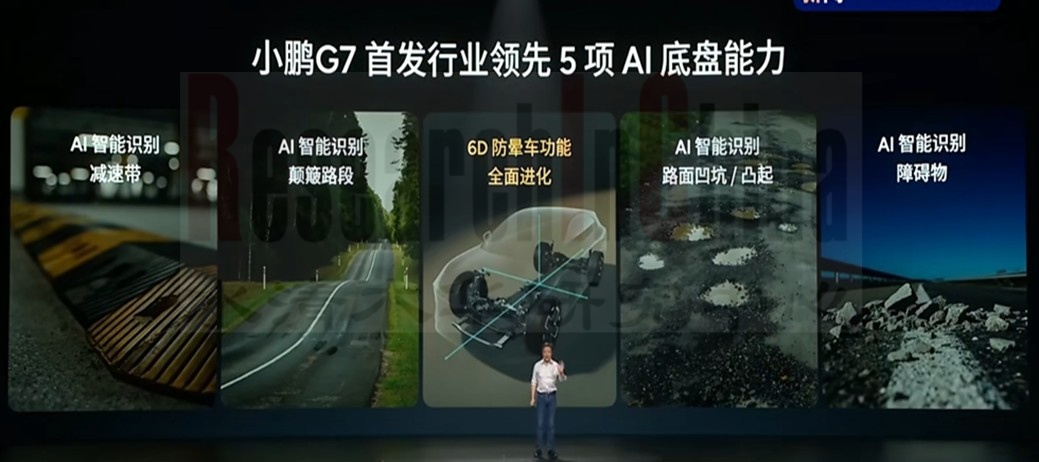
五项核心AI算法与软件能力:
•AI智能识别减速带:能够提前识别路面减速带,自动调整车速和底盘状态。
•AI智能识别颠簸路段:通过车道级颠簸感知记录,实现精准调节。
•6D防晕车功能:结合多维度的传感器数据,实时调整车身姿态,有效降低晕车的发生率。
•AI智能识别路面凹凸:精准感知路面的凹凸状况,结合云端数据更新及时调整底盘参数。
•AI智能识别障碍物:行驶过程及时识别前方障碍物,提前预警并采取相应的底盘调整措施。
来源:小鹏汽车
感知与执行能力:
•支持最远200米的提前识别,并具备车道级颠簸感知记录功能。
•支持每秒1000次扫描,300毫秒内完成调节。
•24小时更新云端颠簸图层,最快21天可迭代新功能。
小鹏G7的太极AI底盘可以生成24小时的云端颠簸图层,这个数据可以用于给到其他小鹏车型进行提示,帮助驾驶员手动或辅助驾驶更好地进行驾驶决策。
小鹏车群协同智能预瞄功能示意图

来源:小鹏汽车
2025年10月,零跑全新发布的旗舰车型D19搭载了LMC2.0底盘运动融合控制系统,包括了高速双轮爆胎稳定系统、主动预瞄凌波微步技术、空悬一键调平、三电机圆规掉头、爆胎稳定控制等功能。
•制动层面采用了MK C2 线控制动系统,MK C2是AUMOVIO(原大陆汽车)第二代一体式(One box)制动系统(Integrated Braking Technologies)
•转向层面采用了R-EPS平行轴式电动助力转向系统,由博世供应
•悬架层面采用了双腔闭式空悬方案,采用CDC(连续阻尼可调)减振器的半主动悬架,由孔辉供应
•底盘域控制器采用了自研的LMC2.0一体化底盘运动融合控制系统。通过对制动,转向,驱动和悬架融合控制,可以实现毫秒级响应速度,实现双轮爆胎稳定,凌波微步,一键调平,圆规掉头,零动掉头,防晕车模式,湿滑路面防打滑,高速过弯预稳定,动态转向辅助,主动预瞄等功能;全面提升了车辆底盘操控乐趣与乘坐舒适性。

来源:零跑汽车
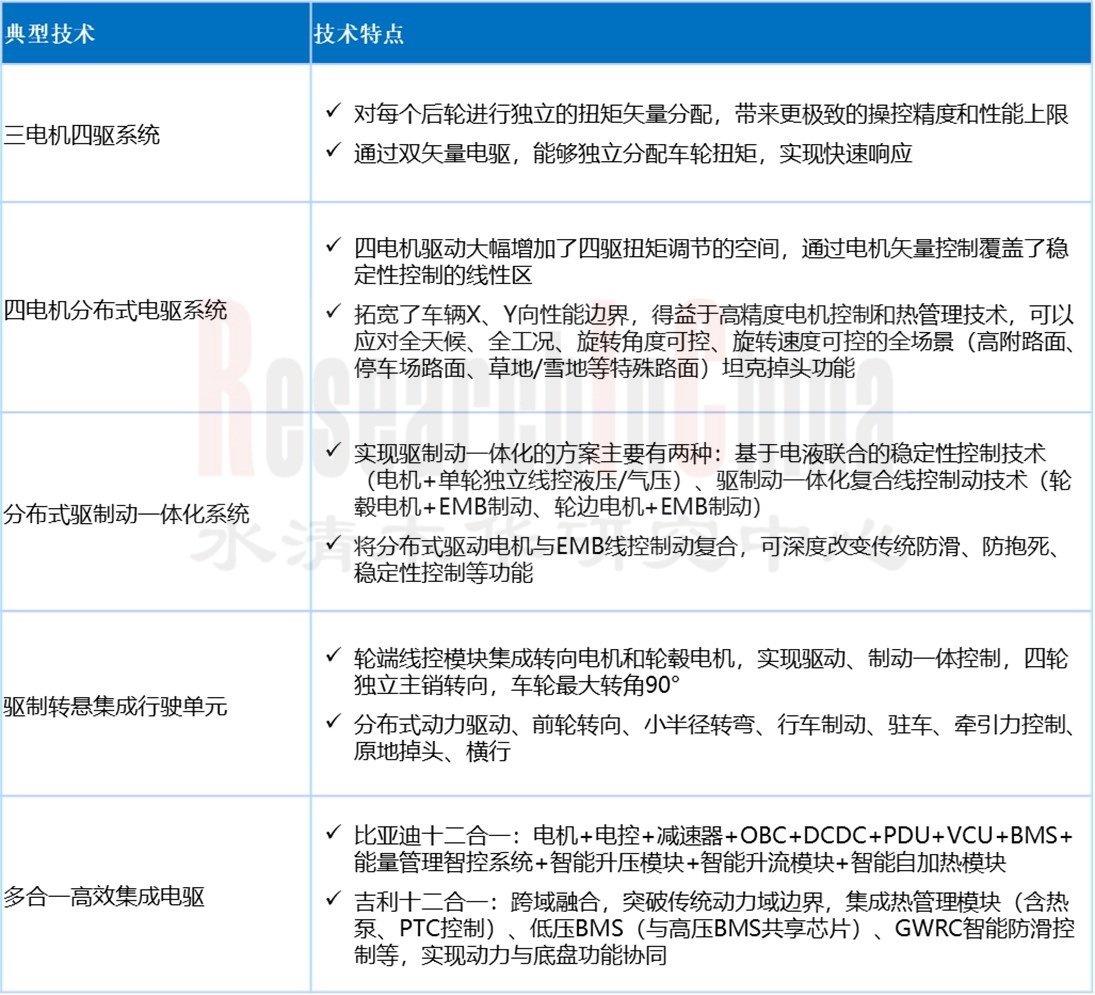
智能动力域:向驱、制、转、悬各子系统的融合智能控制发展
随着智能驾驶的快速发展,整车对于动力域时延要求越来越高,动力域将由当前的驱动系统电动化,走向驱动、转向、悬架、制动等系统的全面电动化。
未来,动力底盘域将会通过驱、制、转、悬各子系统的融合智能控制,形成“动力域小脑”,实现整车全场景更安全、更舒适、更敏捷的操控。
智能动力域深度融合发展方向
来源:佐思汽研《2025年智能汽车E/E架构和技术供应链搭建策略研究报告》
随着E/E架构向集中式发展,制动、转向、悬架等系统逐步解耦为电控单元(如线控制动、线控转向),并通过中央ECU实现多维度协同控制。
•长安汽车将驱动、制动、转向、悬架进行深度融合与协同控制,实现驱制转悬一体化控制,为智能化场景提供了无限可能,实现原地掉头、自动漂移、全体验赛车游戏等场景功能,为智驾场景提供快速、精准、冗余的执行。
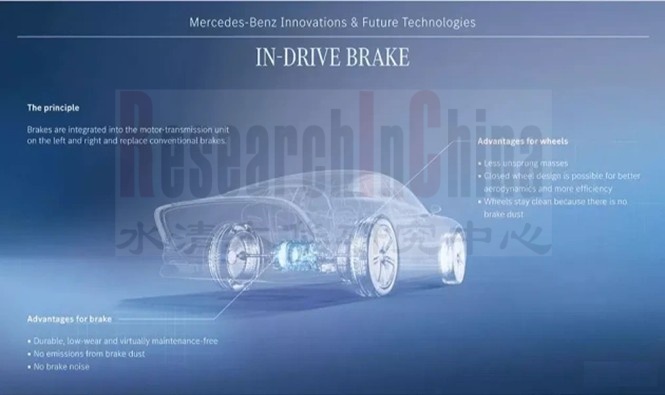
•奔驰汽车In-Drive的电驱动系统,In-Drive的制动器集成在左右两侧的电机传动装置中,取代了传统的制动器,进一步实现物理和系统层级的驱制动一体化。
奔驰汽车In-Drive brake电驱动系统
来源:奔驰汽车
01 E/E架构定义和发展趋势
1.1 E/E架构部署现状及趋势
汽车E/E架构-演变趋势
汽车E/E架构-五个评测维度
E/E演进趋势下的三个发展阶段:Multi Box、One Box、One Chip(1)
E/E演进趋势下的三个发展阶段:Multi Box、One Box、One Chip(2)
中央计算CCU——中央+区域架构的发展方向(1)
中央计算CCU——中央+区域架构的发展方向(2)
中央计算CCU——中央+区域架构的发展方向(3)
中央计算CCU——中央+区域架构的发展方向(4)
行业内主流的整车中央/准中央+区域E/E架构方案
中央+区域架构下,通信带宽将数量级大幅提升
中央/准中央+区域架构的几种部署形式(1):高性价比、高灵活性
中央/准中央+区域架构的几种部署形式(2):高性能,多计算平台
中央/准中央+区域架构的几种部署形式(3):高性能,中央计算平台
中央/准中央+区域架构的几种部署形式(4):One Chip,引入Chiplet
1.2 不同类型E/E架构部署渗透率预测
分类方法(1)中国本土乘用车E/E架构渗透率和趋势预测,2025-2030E
分类方法(1)附数据表:中国本土乘用车E/E架构渗透率和趋势预测,2025-2030E
分类方法(2)按功能场景
分类方法(2)按功能场景渗透率预测,2024-2030E
02 E/E架构升级演进趋势及对供应链的影响
趋势一:One chip舱驾一体方案崭露头角
One Box方案
典型的One box解决方案
One Chip方案
典型的One chip解决方案
极狐T5全球首发one chip 方案(1)
极狐T5全球首发one chip 方案(2)
极狐T5全球首发one chip 方案(3)
One chip舱驾融合方案挑战一
One chip舱驾融合方案挑战二
One chip舱驾融合方案挑战三
One chip舱驾融合方案挑战四
趋势二:
趋势三:
趋势四:车载光通信启动装车验证,或成为下一代骨干网络
车载以太网光纤通信:从铜缆向光纤通信发展
光通信与传统铜缆电通信技术标准对比
车载光纤以太网通信产品发展进程
车载光通信产业链成熟情况
车载以太网光纤通信产品发展进程:供应商及产品
车载以太网光纤通信产品发展进程
车载以太网光纤通信产品发展进程:主机厂布局总结
趋势五:
趋势六:高速视频解串行( SerDes )将与以太网传输展开竞争
10G+以太骨干网 & 以太网摄像头
以太网摄像头 VS 解串行
以太网摄像头 VS 解串行
宝马计划将ASA-MLE用于量产车型
高速视频解串行( SerDes )正向10G+ 发展
各类型10G+车载SerDes芯片产品
SerDes向公有协议发展,并提出兼容车载以太网
趋势七:中央网关向区域网关(Zonal Gateway)演进
中央+Zonal架构:区域网关/中央网关
中央+Zonal架构:中央网关
中央+Zonal架构:区域网关
趋势八:
趋势九:
趋势十:
03 中国OEM厂商E/E架构升级和演进趋势
3.1 小米汽车
小米汽车E/E架构演进趋势:EEA1.0 — EEA2.0 — EEA3.0
小米汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:小米汽车
先进E/E架构演进及供应链搭建:小米汽车
先进E/E架构演进及供应链搭建:小米汽车
先进E/E架构演进及供应链搭建:小米汽车
先进E/E架构演进及供应链搭建:小米汽车
先进E/E架构演进及供应链搭建:小米汽车
小米下一代EEA3.0:下一代智能底盘预研技术
小米下一代EEA3.0:下一代智能底盘预研技术
小米下一代EEA3.0:下一代智能底盘预研技术:48V 底盘系统
小米EEA2.0:YU7四域合一中央计算平台
小米EEA2.0:YU7四域合一中央计算平台(1)
小米EEA2.0:YU7四合一域控模块(2),PCB板
小米EEA2.0:YU7四合一域控模块(3),智驾域控BOM成本
.....................
小米EEA2.0:YU7四合一域控模块(9),BOM成本
小米EEA2.0:YU7智能座舱:天际屏全景显示
小米EEA2.0:YU7智能座舱:超级小爱升级端侧大模型
小米EEA2.0:YU7智能座舱:与苹果生态的深度整合
小米EEA2.0:YU7智能座舱:与穿戴设备联动
小米EEA2.0:YU7智能驾驶:硬件配置
小米EEA2.0:YU7智能底盘
小米EEA1.0:SU7 3大域+3个区域控制器
小米EEA1.0:SU7整车中央域VCCD(1)
小米EEA1.0:SU7整车中央域VCCD(2)
小米EEA1.0:SU7智能驾驶域(1)
小米EEA1.0:SU7智能驾驶域(2)
小米EEA1.0:SU7智能座舱域(1)
小米EEA1.0:SU7智能座舱域(2)
小米EEA1.0:SU7区域和车身控制(1)
小米EEA1.0:SU7区域和车身控制(2)
小米EEA1.0:通信域
3.2 零跑汽车
零跑汽车E/E架构演进趋势:LEAP1.0 — LEAP4.0
零跑汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:零跑汽车
先进E/E架构演进及供应链搭建:零跑汽车
零跑汽车LEAP4.0(D平台):关键创新技术
零跑汽车LEAP4.0(D平台):自研体系
零跑汽车LEAP4.0(D平台):核心供应商
零跑汽车LEAP4.0(D平台):中央域控(1)
零跑汽车LEAP4.0(D平台):中央域控(2)
零跑汽车LEAP4.0(D平台):中央域控(3)
零跑汽车LEAP4.0(D平台):底盘域
零跑汽车LEAP4.0(D平台):底盘域:制动系统
零跑汽车LEAP4.0(D平台):底盘域:转向系统
零跑汽车LEAP4.0(D平台):底盘域:悬架系统
零跑汽车LEAP4.0(D平台):底盘域:自研底盘域控
零跑汽车LEAP4.0(D平台):动力域:多电机四驱和双矢量电驱技术
零跑汽车LEAP4.0(D平台):动力域:采埃孚eRE+增程系统,发电驱动一体机
零跑汽车LEAP4.0(D平台):座舱域:车身电子
零跑汽车LEAP4.0(D平台):智驾域:40余项VLA辅助驾驶功能
零跑汽车-LEAP3.5 & LEAP3.0 对比
零跑汽车-LEAP3.5技术架构解析:技术架构
零跑汽车-LEAP3.5技术架构解析:高阶舱驾一体中央域控平台,高通8295+8650
零跑汽车-LEAP3.5技术架构解析:智能座舱
零跑汽车-LEAP3.5技术架构解析:端到端高阶智驾
零跑汽车-LEAP3.5技术架构解析:电池系统,CTC 2.0 Plus电池底盘一体化
零跑汽车-LEAP3.5技术架构解析:电池系统,9合1超集成电池控制模块
零跑汽车-LEAP3.5技术架构解析:七合一油冷电驱方案
零跑汽车-LEAP3.5技术架构解析:超级集成热管理架构
零跑汽车-LEAP3.5技术架构解析:LMC一体化运动融合控制底盘系统
3.3 极氪汽车
极氪汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:极氪汽车
极氪ZEEKR- EE 3.0:中央计算架构:架构设计
极氪ZEEKR- EE 3.0:中央超算平台设计
极氪ZEEKR- EE 3.0:跨域通信设计
极氪ZEEKR- EE 3.0:软件功能部署
极氪ZEEKR- EE 3.0:区域控制器
极氪ZEEKR- EE 3.0:区域控制器,智能配电设计
ZEEKR EE 3.0:动力域(混动架构):极氪9X基于纯电架构打造的电混专属架构浩瀚-S
ZEEKR EE 3.0:动力域(混动架构):浩瀚超级电混,全球首套三电机兆瓦级混动电驱系统
ZEEKR EE 3.0:动力域(混动架构):6C混动电池+大功率增程发动机
ZEEKR EE 3.0:动力域(纯电架构):900V+6C超充电池
ZEEKR EE 3.0:底盘域:浩瀚AI数字底盘(1)
ZEEKR EE 3.0:底盘域:浩瀚AI数字底盘(2)
ZEEKR EE 3.0:底盘域:浩瀚AI数字底盘(3)
ZEEKR EE 3.0:动力+底盘跨域:驱制动纵向控制融合的技术实践
ZEEKR EE 3.0:动力+底盘跨域:多电机驱制动一体化技术的发展方向
ZEEKR EE 3.0:智驾域:极氪汽车浩瀚智驾2.0
ZEEKR EE 3.0:智驾域:场景认知大模型+交互式规控大模型
ZEEKR EE 3.0:智驾域:一段式端到端Plus架构
ZEEKR EE 3.0:智驾域:千里浩瀚智能驾驶系统
ZEEKR EE 3.0:智驾域:千里浩瀚H9(1)
ZEEKR EE 3.0:智驾域:千里浩瀚H9(2)
ZEEKR EE 3.0:智驾域:千里浩瀚H7(1)
ZEEKR EE 3.0:智驾域:千里浩瀚H7(2)
ZEEKR EE 3.0:行驶区域:极氪汽车整车行驶区域控制器的融合路径
ZEEKR EE 3.0:行驶区域:极氪汽车整车行驶区域控制器的融合策略
ZEEKR EE 3.0:行驶区域:动力底盘域融合方案选择High Level方案进行三电功能融合
ZEEKR EE 3.0:行驶区域:动力底盘域融合方案(1)——电机控制功能融合
ZEEKR EE 3.0:行驶区域:动力底盘域融合方案(1)——电池管理功能融合
ZEEKR EE 3.0:行驶区域:动力底盘域融合方案(1)——充电功能融合
ZEEKR EE 3.0:行驶区域:动力底盘域融合方案(1)——三电功能融合
ZEEKR EE 3.0:行驶区域:PCMU(行驶区域控制器)(1)
ZEEKR EE 3.0:行驶区域:PCMU(行驶区域控制器)(2)
ZEEKR EE 3.0:行驶区域:PCMU(行驶区域控制器)(3)
ZEEKR EE 3.0:行驶区域:PCMU(行驶区域控制器)(4)
3.4 蔚来&乐道汽车
蔚来&乐道汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:蔚来&乐道汽车
先进E/E架构演进及供应链搭建:蔚来&乐道汽车
蔚来NT3.0:数字架构设计:总体框架
蔚来NT3.0:数字架构设计:大脑(中央计算机)+小脑(区域控制器)
蔚来NT3.0:数字架构设计:中央计算平台新一代ADAM( NT3.0)
蔚来NT3.0:数字架构设计:区域控制器采用AMP微核架构(1)
蔚来NT3.0:数字架构设计:区域控制器采用AMP微核架构(2)
蔚来NT3.0:数字架构设计:通信神经网络
蔚来NT3.0:数字架构设计:双冗余低压电源
蔚来NT3.0:数字架构设计:配电冗余相较于ASILB 可靠性提升10倍,接近ASIL D的水平
蔚来NT3.0:数字架构设计:感知、算法
蔚来NT3.0:数字架构设计:整车全域操作系统SkyOS·天枢
蔚来NT3.0:数字架构设计:48V低压供电网络架构
蔚来NT3.0:底盘域:神行智享底盘
蔚来NT3.0:底盘域:Sky Ride天行底盘系统
蔚来NT3.0:底盘域:Sky Ride天行全主动悬架
蔚来NT3.0:底盘域:Sky Ride天行底盘系统
蔚来NT3.0:智驾域:搭配自研SoC“神玑NX9031”
蔚来NT3.0:热管理域:ITM热管理集成模块
蔚来NT3.0(高性价比版):乐道系列中央+区域架构
蔚来NT3.0(高性价比版):乐道系列中央计算集群四域集成
蔚来NT3.0(高性价比版):乐道系列中央+区域+配电设计
蔚来NT3.0(高性价比版):乐道系列100%智能保险丝
蔚来NT3.0(高性价比版):乐道系列49合1全栈自研热管理集成模块
蔚来NT3.0(高性价比版):乐道系列中央云混合边缘云技术
蔚来NT2.0:中央计算平台ADAM
蔚来NT2.0:智能底盘域控制器ICC
蔚来NT2.0:2024款ES8网络拓扑
3.5 小鹏汽车
小鹏汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:小鹏汽车 (1)
先进E/E架构演进及供应链搭建:小鹏汽车 (2)
.....................
先进E/E架构演进及供应链搭建:小鹏汽车 (7)
小鹏下一代E/E架构规划:AI超算架构
小鹏XEEA4.0:图灵 AI 芯片 (1)
小鹏XEEA4.0:图灵 AI 芯片 (2)
小鹏XEEA4.0:图灵 AI 芯片 (3)
小鹏XEEA4.0:世界基座模型
小鹏XEEA4.0:整车端到端确定性OS
小鹏XEEA4.0:整车跨域通信中间件
小鹏XEEA4.0:沧海底座
小鹏XEEA4.0:太极AI底盘
小鹏XEEA4.0:AI天玑系统
小鹏XEEA4.0:800V高压电驱系统技术发展(小鹏鲲鹏超级电动体系)
小鹏XEEA4.0:Xbrain终极架构
小鹏XEEA4.0:63.3 度超快充磷酸铁锂增程大电池
小鹏XEEA3.0:网络拓扑,3个计算群+左右区控
小鹏XEEA3.0:P7+的整车网络架构(1)
小鹏XEEA3.0:P7+的整车网络架构(2)
.....................
小鹏XEEA3.0:P7+的整车网络架构(8)
3.6 华为鸿蒙智行
华为E/E架构演进:从星型组网到以太环网
华为C-C 环网架构:优势(1)
华为C-C 环网架构:优势(2)
华为C-C 环网架构:优势(3)
华为C-C 环网架构:合作模式
鸿蒙智行(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:华为鸿蒙智行(1)
先进E/E架构演进及供应链搭建:华为鸿蒙智行(2)
.....................
先进E/E架构演进及供应链搭建:华为鸿蒙智行(7)
华为C-C 环网架构:从被动智能到主动智能
华为C-C 环网架构:华为乾崑智能数字底座iDVP2.0
华为C-C 环网架构:底盘域:途灵龙行平台
华为C-C 环网架构:底盘域:华为数字底盘引擎XMC
华为C-C 环网架构:车控域:华为自研车控模组
华为C-C 环网架构:动力域:华为DriveONE动力域转向运动域
华为C-C 环网架构:动力域:华为DriveONE运动域融合解决方案
华为C-C 环网架构:动力域:华为DriveONE运动域近端闭环解决方案iTRACK
华为C-C 环网架构:动力域:华为DriveONE度电续航单一部件向整车效能融合管理迈进
华为C-C 环网架构:车身域:华为智能车灯系统2.0
华为C-C 环网架构:座舱域:未来智能座舱核心能力
华为C-C 环网架构:座舱域:HarmonyOS 5.0
华为C-C 环网架构:乾崑ADS 4.0,世界模型(World Action)路线
华为C-C 环网架构:乾崑ADS 4.0,华为云盘古大模型
华为C-C 环网架构:巨鲸电池2.0
华为C-C 环网架构:区域:华为集成网关区域控制器VIU
华为智界-智界S7 E/E架构设计:自动驾驶域(1)
华为智界-智界S7 E/E架构设计:自动驾驶域(2)
.....................
华为智界-智界S7 E/E架构设计:智能座舱域(6)
华为智界-智界S7 E/E架构设计:底盘域
华为智界-智界S7 E/E架构设计:电驱动系统
华为智界-智界S7 E/E架构设计:高低压系统
华为智界-智界S7 E/E架构设计:配电设计
华为问界-问界M9 E/E架构拓扑图
华为问界-问界M9 E/E架构拓扑图:整车域控VDC
华为问界-问界M9 E/E架构拓扑图:自动驾驶域控MDC
华为问界-问界M9 E/E架构拓扑图:座舱域&底盘域
华为问界-问界M9 E/E架构拓扑图:左区域控制器VIU1
华为问界-问界M9 E/E架构拓扑图:右区域控制器VIU2
华为问界-问界M9 E/E架构拓扑图:后区域控制器VIU3
华为问界-问界M9 E/E架构拓扑图:电驱动&高压系统
华为问界-问界M9 E/E架构拓扑图:VCU和电源管理策略
3.7 理想汽车
理想汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:理想汽车 (1)
先进E/E架构演进及供应链搭建:理想汽车 (2)
.....................
先进E/E架构演进及供应链搭建:理想汽车 (6)
理想汽车-E/E架构演进Roadmap
理想汽车LEEA2.5:智驾域:VLA大模型+语音控车
理想汽车LEEA2.5:智驾域:AD4.0和ATL全天候激光雷达
理想汽车LEEA2.5:座舱域:自研Mind GPT大模型
理想汽车LEEA2.5:座舱域:自研+多供应商底层供应共同打造理想同学语音助手
理想汽车LEEA2.5:座舱域:信息娱乐
理想汽车LEEA2.5:底盘域:新一代双腔双阀魔毯空气悬架
理想汽车LEEA2.5:中央控制器域:理想汽车智慧车控架构
理想汽车LEEA2.5:安全架构:数据安全部署
理想下一代LEEA3.0架构:中央算力平台+4个区域控制器
理想下一代LEEA3.0架构:CCU中央计算机
理想下一代LEEA3.0架构:区域控制器
理想下一代LEEA3.0架构:PCIe Switch & TSN Switch通信架构
理想下一代LEEA3.0架构:理想自研中央计算SoC 舒马赫M100
理想下一代LEEA3.0架构:SOA和基础软件:星环OS(1)
.....................
理想下一代LEEA3.0架构:SOA和基础软件:星环OS(4)
理想下一代LEEA3.0架构:星环 OS:总体架构
理想下一代LEEA3.0架构:星环 OS:VBS通信中间件
理想下一代LEEA3.0架构:星环 OS:VBS通信中间件:支持全域统一部署
理想下一代LEEA3.0架构:星环 OS:VBS通信中间件:多传输协议自适应
理想下一代LEEA3.0架构:星环OS:VBS-Pro通信总线:研发背景
理想下一代LEEA3.0架构:星环OS:VBS-Pro通信总线:自研必要性
理想下一代LEEA3.0架构:星环OS:VBS-Pro通信总线:功能特性
理想下一代LEEA3.0架构:星环OS:VBS-Pro通信总线:通信效果
理想下一代LEEA3.0架构:星环 OS:智能车控 OS
理想下一代LEEA3.0架构:星环 OS:开源计划
理想下一代LEEA3.0架构:合作赫千科技研发光通信台架
理想下一代LEEA3.0架构:赫千科技车载光纤网络通信架构
理想下一代LEEA3.0架构:赫千科技高速光纤TSN集中架构的一种配置方案
理想下一代LEEA3.0架构:赫千科技基于光模组搭建EEA光通信架构实物图
理想下一代LEEA3.0架构:赫千科技 光电混合型中央网关
3.8 岚图汽车
岚图EEA整体路线图
东风岚图(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:岚图汽车 (1)
先进E/E架构演进及供应链搭建:岚图汽车 (2)
.....................
先进E/E架构演进及供应链搭建:岚图汽车 (5)
岚图天元架构中央集成式架构
岚图天元架构:计算平台:中央控制器OIB(集成BCM+动力+智驾+智舱)
岚图天元架构:计算平台:下一代基于黑芝麻智能芯片的舱驾一体方案
岚图天元架构:区域控制器VIU(集成区域数据中心+智能配电+智能分区I/O控制)
岚图天元架构:天元OS系统(面向中央计算架构与跨域融合)
岚图天元架构:座舱域:基于高通8295的AI智能座舱部署,融合域控与区域接入机制
岚图青云“天元智架”:动力+底盘:青云L3级智能安全行驶平台(1)
岚图青云“天元智架”:动力+底盘:青云L3级智能安全行驶平台(2)
岚图青云“天元智架”:动力+底盘:全主动悬架
岚图青云“天元智架”:动力+底盘:线控转向
岚图青云“天元智架”:动力+底盘:超级智慧底盘
岚图青云“天元智架”:动力+底盘:岚海动力纯电系统(BEV)
岚图青云“天元智架”:动力+底盘:岚海智混技术
岚图青云“天元智架”:动力+底盘:轴向磁通电机,全轮独立驱动控制
岚图青云“天元智架”:智驾域:鲲鹏L3级智能安全驾驶系统
岚图下一代E/E架构:东风车载光通信已完成第一阶段研究测试
3.9 阿维塔
阿维塔(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:阿维塔(1)
先进E/E架构演进及供应链搭建:阿维塔(2)
先进E/E架构演进及供应链搭建:阿维塔(3)
阿维塔中央+区域电子电器架构(1)
阿维塔中央+区域电子电器架构(2)
阿维塔中央+区域电子电器架构(3)
阿维塔“中央+区域”架构:底盘域:太行智控底盘(1)
阿维塔“中央+区域”架构:底盘域:太行智控底盘(2)
阿维塔“中央+区域”架构:底盘域:魔毯底盘调节(感知+底盘融合)
阿维塔“中央+区域”架构:底盘域:高速爆胎稳定、大师漂移
阿维塔“中央+区域”架构:智驾域:华为四激光雷达系统+华为乾崑智驾ADS 4
阿维塔“中央+区域”架构:智驾域:全维防碰撞系统CAS 4.0
阿维塔“中央+区域”架构:座舱域:鸿蒙座舱HarmonySpace 5
阿维塔11 E/E架构设计:整车网络拓扑图
阿维塔11 E/E架构设计:智能座舱域网络拓扑图
3.10 ARCFOX极狐
北汽乘用车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:极狐汽车 (1)
先进E/E架构演进及供应链搭建:极狐汽车 (2)
先进E/E架构演进及供应链搭建:极狐汽车 (3)
先进E/E架构演进及供应链搭建:极狐汽车 (4)
北汽E/E架构演进路线图
北汽技术研发体系:舱驾智能体平台布局演进
北汽技术研发体系:技术框架
北汽技术研发体系:智能网联基础软件平台
北汽技术研发体系:具身智能体场景化探索
北汽技术研发体系:全天候全地形技术应用探索
北汽极狐BEEA3.0:舱驾融合AI平台,极狐T5搭载高通SA8775P舱驾一体方案
北汽极狐BEEA3.0:舱驾融合AI平台,系统框架
北汽极狐BEEA3.0:舱驾融合AI平台,供应链布局
北汽极狐BEEA3.0:舱驾融合AI平台,生态和数据共享
北汽极狐BEEA3.0:智驾域:北汽元境智行辅助驾驶系统
北汽极狐BEEA3.0:车控域:中央集成架构VDC+VIU,网关、车身域、动力域、OTA四域融合
北汽极狐BEEA3.0:座舱域:百模创汇
北汽极狐BEEA3.0:动力域:新一代混动域控HDCU 3.0
北汽极狐BEEA3.0:动力域:混动HDCU 3.0混动场景化模型
北汽极狐BEEA3.0:动力域:北汽神擎增程动力
3.11 长安汽车
长安汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:长安汽车 (1)
先进E/E架构演进及供应链搭建:长安汽车 (2)
先进E/E架构演进及供应链搭建:长安汽车 (3)
先进E/E架构演进及供应链搭建:长安汽车 (4)
长安汽车:北斗天枢2.0计划
长安汽车:数智底座与平台
长安汽车SDA架构:六层架构设计,分层解耦
长安汽车SDA架构:六层架构设计,L1机械层
长安汽车SDA架构:六层架构设计,L2能源层
长安汽车SDA架构:六层架构设计,L3层,中央+环网架构设计
长安汽车SDA架构:六层架构设计,L3层,区域控制器设计特点
长安汽车SDA架构:六层架构设计,L3层,双十六域合一的左右分区控制
长安汽车SDA架构:六层架构设计,L4层,长安天枢OS
长安汽车SDA架构:六层架构设计,L4层,RTDriveOS智能驾驶操作系统
长安汽车SDA架构:软件架构:L5层,AI服务层
长安汽车SDA架构:软件架构:L5层,舱驾控一体体验平台
长安汽车SDA架构:六层架构设计,L6层,云端大数据层(1)VDP-智能车云平台
长安汽车SDA架构:六层架构设计,L6层,云端大数据层(2)数据闭环能力
长安汽车SDA架构:通讯架构:主干网通讯设计
长安汽车SDA架构:通讯架构:服务化通信(SOMEIP&DDS)设计
长安汽车SDA架构:底盘域:天枢智能底盘——三向六域协同
长安汽车SDA架构:底盘域:天枢智能底盘,主动抗横风稳定系统
长安汽车SDA架构:底盘域:可变自适应悬架
长安汽车SDA架构:底盘域:深蓝L06-磁流变悬架
长安汽车SDA架构:动力域:跨域联动和融合
长安汽车SDA架构:动力域:驾驶模式组合
长安汽车SDA架构:动力域(混动):智慧新蓝鲸3.0(动力+底盘+智舱+云)
长安汽车SDA架构:动力域(混动):智慧新蓝鲸3.0,IEM3.0智慧动力控制系统
长安汽车SDA架构:座舱域:深蓝L06-天玑座舱 S1 Ultra
长安汽车SDA架构:车身(区域):跨域集成演进BCM→BDC→VIU
长安汽车SDA架构:金钟罩电池
3.12 广汽乘用车
广汽乘用车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:广汽乘用车 (1)
先进E/E架构演进及供应链搭建:广汽乘用车 (2)
.......................
先进E/E架构演进及供应链搭建:广汽乘用车 (6)
广汽GA3.5:架构设计:三域+4个车身区控
广汽GA3.5:架构设计:硬件系统设计框图
广汽GA3.5:架构设计:三大高性能计算单元
广汽GA3.5:自动驾驶、数字座舱和车联网软硬件体系
广汽GA3.5:软件架构:广汽普赛OS,核心引擎
广汽GA3.5:软件架构:广汽普赛OS,与东软睿驰联合研发
广汽GA3.5:安全架构:星灵安全守护体系
广汽GA3.5:车身(区)域:采用大陆集团Body HPC2
广汽GA3.5:车身(区)域:采用大陆集团Body HPC2,搭载恩智浦S32G399 MCU
广汽GA3.5:底盘域:昊铂智慧数字底盘
广汽GA3.5:底盘域:昊铂智慧数字底盘,鹰爪系统2.0主动稳向控制(ASTC)
广汽GA3.5:智驾域:“星灵智行”
广汽GA3.5:智驾域:“星灵智行”,自研无图纯视觉智驾系统
广汽GA3.5:智驾域:华为乾崑智驾ADS 3.0系统
广汽GA3.5:座舱域:ADiGO SPACE智能座舱
广汽GA3.5:座舱域:ADiGO SPACE“智行2027”智能座舱路线图
广汽GA3.5:动力域:N合一集成电驱,实现动力域与温控域的跨域集成
广汽GA3.5:动力域(增混架构):昊铂“星源增程系统”
广汽GA3.5:动力域(增混架构):宁德时代骁遥增混3C电池
广汽GA3.5“星灵”架构设计:自动驾驶域
广汽GA3.5“星灵”架构设计:自动驾驶域,华为MDC版(1)
广汽GA3.5“星灵”架构设计:自动驾驶域,华为MDC版(2)
广汽GA3.5“星灵”架构设计:自动驾驶域,华为MDC版(3)
广汽GA3.5“星灵”架构设计:自动驾驶域,ORIN版
广汽GA3.5“星灵”架构设计:座舱域网络架构
广汽GA3.5“星灵”架构设计:中央计算域
广汽GA3.5“星灵”架构设计:中央计算域网络架构
广汽GA3.5“星灵”架构设计:整车双电源供电设计
广汽GA3.5“星灵”架构设计:低压供电网络架构
广汽GA3.5“星灵”架构设计:高压电源网络架构
广汽GA3.5“星灵”架构设计:车身区控电气拓扑图,前/后
广汽GA3.5“星灵”架构设计:车身区控电气拓扑图,左/右
广汽GA3.5“星灵”架构设计:5G TBOX网络架构
广汽GA3.5“星灵”架构设计:架构特点总结
广汽下一代E/E架构:汽车+域:飞行汽车和人形机器人
广汽下一代E/E架构:L4级robotaxi
广汽下一代E/E架构:L4级robotaxi,三域融合中央计算平台
3.13 一汽红旗
一汽红旗飞刃EE架构跨域融合演进
一汽红旗(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:一汽红旗 (1)
先进E/E架构演进及供应链搭建:一汽红旗 (2)
.............................
先进E/E架构演进及供应链搭建:一汽红旗 (6)
一汽集团整体技术规划
一汽集团整体技术平台
一汽红旗飞刃1.X架构:九章智能平台FAW.OS 操作系统
一汽红旗飞刃1.X架构:中央计算平台:向跨融合方向发展
一汽红旗飞刃1.X架构:中央计算平台:自研五域融合AI芯片“红旗1号”
一汽红旗飞刃1.X架构:中央计算平台:黑芝麻武当C1296舱驾融合平台
一汽红旗飞刃1.X架构:中央计算平台:高通8775舱驾融合控制器
一汽红旗飞刃1.X架构:舱驾一体:VLA模型
一汽红旗飞刃1.X架构:座舱域:“红旗灵犀座舱”
一汽红旗飞刃1.X架构:座舱域:横、竖屏统一的中控屏交互框架
一汽红旗飞刃1.X架构:智驾域:司南智驾
一汽红旗飞刃1.X架构:底盘域:AI智能底盘系统
一汽红旗飞刃1.X架构:底盘+智驾融合:司南智驾“全域智能”
一汽红旗飞刃1.X架构:动力域:“红旗·天工”纯电平台
一汽红旗飞刃1.X架构:动力域:900V高压平台+高效碳化硅油冷电驱
一汽红旗飞刃1.X架构:动力域:中央控制器+矢量控制四电机系统
一汽红旗飞刃1.X架构:动力域(混动平台):红旗·鸿鹄 混动平台
一汽红旗-FEEA3.0(飞刃1.0):智能车控系统框图
一汽红旗-FEEA3.0(飞刃1.0):智能通信域、自动驾驶域系统框图
一汽红旗-FEEA3.0(飞刃1.0):前智能区域控制器系统框图
一汽红旗-FEEA3.0(飞刃1.0):电源冗余
一汽红旗下一代E/E架构:48V R-EPS
一汽红旗下一代E/E架构:48V EPS转向产品线及设计思路
一汽红旗下一代E/E架构:经纬恒润48V 冗余EPS
一汽红旗下一代E/E架构:脑机接口人机共驾前瞻技术研究
3.14 长城汽车
长城汽车E/E架构演进路线图
长城汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:长城汽车 (1)
先进E/E架构演进及供应链搭建:长城汽车 (2)
先进E/E架构演进及供应链搭建:长城汽车 (3)
先进E/E架构演进及供应链搭建:长城汽车 (4)
长城GEEP 4.0:舱驾一体中央计算+3个区域控制器+SOA软件拓扑
长城GEEP 4.0:硬件拓扑
长城GEEP 4.0:中央计算单元CCU
长城GEEP 4.0:区域控制器VIU
长城GEEP 4.0:SOA软件框架
长城GEEP 4.0:安全架构
长城GEEP 4.0:底盘域:智慧线控底盘集成底盘域控
长城GEEP 4.0:底盘域:越野车智能底盘“魔毯空气悬架”+“智能四驱”
长城GEEP 4.0:智驾域:新一代智驾系统Coffee Pilot Ultra
长城GEEP 4.0:动力域:新一代全动力智能超级平台
长城GEEP 4.0:动力域:Hi4 智能四驱电混技术
长城GEEP 4.0:动力域:Hi4 智能四驱电混技术: 50:50的轴荷分配+iTVC智能扭矩矢量控制
长城GEEP 4.0:座舱域:Coffee AI Sound/车载显示方案
长城跨GEEP 5.0:中央大脑(one brain)+100%SOA
3.15 上汽智己
上汽智己&MG(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:上汽智己 (1)
先进E/E架构演进及供应链搭建:上汽智己 (2)
............................
先进E/E架构演进及供应链搭建:上汽智己 (5)
上汽银河全栈3.0:HPC+3-4个Zone区域控制器
上汽银河全栈3.0:超级计算大脑系列产品线
上汽银河全栈3.0:计算平台:中央大脑ZXD2(驾舱融合)
上汽银河全栈3.0:计算平台:中央大脑ZXD1(座舱、智算融合)
上汽银河全栈3.0:软件架构:AI OS
上汽银河全栈3.0:软件架构:跨域SOA软件平台
上汽银河全栈3.0:底盘域:线控数字底盘技术落地规划
上汽银河全栈3.0:底盘域:灵蜥数字底盘3.0
上汽银河全栈3.0:底盘域:灵蜥数字底盘2.0
上汽银河全栈3.0:底盘域:eTAC边缘扭矩控制技术
上汽银河全栈3.0:车身域:猎鹰智慧灯光系统2.0跨域
上汽银河全栈3.0:车身域:余光感知交互(智驾+座舱)
上汽银河全栈3.0:座舱域:全新IMOS 4.0生态座舱
上汽银河全栈3.0:座舱域:IMOS 3.0智能座舱
上汽银河全栈3.0:动力域:恒星超级增程系统
上汽银河全栈3.0:动力域:智己L6全域800V架构+飓风电机
上汽银河全栈3.0:动力域:基于聚合物-无机物复合电解质技术的固态电池
上汽银河全栈3.0:智驾域:IM AD 3.0智驾系统
上汽银河全栈3.0:智驾域:行业首发500+线激光雷达量产上车
3.16 奇瑞汽车
奇瑞汽车-EEA演进Roadmap:EEA4.0 —EEA5.0—EEA6.0
奇瑞汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:奇瑞汽车 (1)
先进E/E架构演进及供应链搭建:奇瑞汽车 (2)
..........................
先进E/E架构演进及供应链搭建:奇瑞汽车 (7)
奇瑞汽车基于SOA的软件分层设计开发
奇瑞汽车CHERY-OS系统架构
奇瑞汽车星枢数字基座
奇瑞汽车下一代计算平台:高通8775舱驾一体中央计算平台
奇瑞汽车:EEA5.0五大架构
奇瑞汽车:EEA5.0架构设计框图
奇瑞汽车EEA 5.0:架构特点
奇瑞汽车EEA 5.0:底盘域:飞鱼数智底盘2.0系统
奇瑞汽车EEA 5.0:底盘域:飞鱼智行单元
奇瑞汽车EEA 5.0:底盘域:行驶域一体化智控平台
奇瑞汽车EEA 5.0:底盘域:云台智能底盘2.0
奇瑞汽车EEA 5.0:动力域:九合一域控动力总成+双电机分布式电驱
奇瑞汽车EEA 5.0:动力域:EMB电机直驱制动系统
奇瑞汽车EEA 5.0:动力域:鲲鹏天擎混动专用发动机
奇瑞汽车EEA 5.0:动力域:轴向磁通矢量双电机
奇瑞汽车EEA 5.0:动力域:方舟两栖系统
奇瑞汽车EEA 5.0:智驾域:猎鹰智驾智能辅助驾驶系统(1)
............................
奇瑞汽车EEA 5.0:智驾域:猎鹰智驾智能辅助驾驶系统(5)
奇瑞汽车EEA 5.0:智驾域:L4级Robocar+奇瑞iBAR
奇瑞汽车EEA 5.0:智驾域:全场景智能驾驶辅助 C-Pilot 5.0 技术架构
奇瑞汽车EEA 5.0:座舱域:AI超级智能体“小奇同学”+伯牙之音
奇瑞汽车EEA 5.0:犀牛电池
奇瑞汽车EEA 5.0:V2G智慧能源生态+迅龙秒充
奇瑞汽车EEA5.0:汽车+域: “墨甲”+“凌霄飞行平台”
奇瑞汽车EEA5.0:汽车+域:车载无人机与汽车联动
3.17 比亚迪
比亚迪E/E架构演进路线图
比亚迪(分车型平台)E/E架构
比亚迪璇玑 +超级e平台:计算平台:天璇跨域计算平台(四域合一)
比亚迪璇玑 +超级e平台:计算平台:天璇跨域计算平台基于英伟达Thor开发
比亚迪璇玑 +超级e平台:通信架构:天璇跨域计算平台+双千兆双以太网环网
比亚迪璇玑 +超级e平台:前/后/左/右车身区域控制器
比亚迪璇玑 +超级e平台:动力域:e平台演进至超级e平台3.0版本
比亚迪璇玑 +超级e平台:动力域:全域1000V高压架构
比亚迪璇玑 +超级e平台:动力域:10C闪充刀片电池+ 3万转电驱
比亚迪璇玑 +超级e平台:动力域:12合1电驱系统+全域1000V高压架构
比亚迪璇玑 +超级e平台:动力域:动力底盘融合运动控制
比亚迪璇玑 +超级e平台:动力域:下一代超级iTAC技术
比亚迪璇玑 +超级e平台:动力域:云辇车身控制系统演进路线
比亚迪璇玑 +超级e平台:动力域:云辇车身控制系统各技术版本
比亚迪璇玑 +超级e平台:动力域:云辇Z悬浮车身控制系统
比亚迪璇玑 +超级e平台:动力域:云辇+Dipilot智驾系统跨域协同
比亚迪璇玑 +超级e平台:动力域:“易四方”系统
比亚迪璇玑 +超级e平台:动力域:易四方泊车2.0-横移泊车
比亚迪璇玑 +超级e平台:动力域(混动):DM5.0混动系统
比亚迪璇玑 +超级e平台:智驾域:“天神之眼“高阶智能驾驶辅助系统
比亚迪璇玑 +超级e平台:汽车+:“灵鸢”车载无人机-堵车探路
04 外资OEM厂商E/E架构升级和演进趋势
4.1 特斯拉
特斯拉Cybertruck:中央计算+区域架构
特斯拉Cybertruck:整车通信架构
特斯拉Cybertruck:48V低压架构图
特斯拉Cybertruck:48V低压供电网络架构:技术解析
特斯拉Cybertruck:48V低压供电网络架构:菊花链通信架构
特斯拉Cybertruck:48V低压供电网络架构:模块化布线系统
特斯拉Cybertruck:48V低压供电网络架构:48V低压锂电池系统(1)
特斯拉Cybertruck:48V低压供电网络架构:48V低压锂电池系统(2)
特斯拉Cybertruck:48V低压供电网络架构:48V低压锂电池系统(3)
特斯拉Cybertruck:48V低压供电网络架构:48V低压配电单元(1)
.............................
特斯拉Cybertruck:48V低压供电网络架构:48V低压配电单元(4)
特斯拉Cybertruck:48V低压供电网络架构:48V控制系统
特斯拉Cybertruck:48V低压供电网络架构:车身区域模块
特斯拉Cybertruck:48V低压供电网络架构:E-fuse电源架构
特斯拉Cybertruck:48V低压供电网络架构:48V零部件
特斯拉Cybertruck:48V低压供电网络架构:OBC+DCDC充配电一体单元——PCS2
特斯拉Cybertruck:48V低压供电网络架构:全新的48V连接器——LVCS
特斯拉Cybertruck:48V低压供电网络架构:音响系统(1)
特斯拉Cybertruck:48V低压供电网络架构:音响系统(2)
特斯拉Cybertruck:48V低压供电网络架构:音响系统(3)
特斯拉Cybertruck:48V架构与乘用车15V架构对比
特斯拉Cybertruck:线控转向技术
特斯拉Model 系列:将全面转向48V低压供电网络架构
特斯拉Model 系列:将全面转向48V低压供电网络架构:发展规划
特斯拉E/E架构演进路线图
特斯拉-第二代准中央架构设计:EEA拓扑
特斯拉-第二代准中央架构设计:区域控制器融合VCU功能
特斯拉-第二代准中央架构设计:中央计算模块:CCM-HW4.0版本
特斯拉-下一代E/E架构设计:中央计算模块:智驾下一代HW5.0/AI 5.0
特斯拉-第二代准中央架构设计:特斯拉Vision视觉处理系统+安全气囊主动预判
特斯拉-第二代准中央架构设计:第四代热管理系统
特斯拉-第二代准中央架构设计:第四代驱动单元
4.2 奔驰汽车
奔驰汽车-EEA演进:Roadmap
奔驰汽车(分车型平台)E/E架构
奔驰汽车STAR3 Domain E/E架构设计
奔驰STAR3:软件:MB.OS操作系统
奔驰STAR3:底盘域:线控悬架演进路线
奔驰STAR3:底盘域:奔驰智能悬架系统E-ABC
奔驰STAR3:底盘域:奔驰智能悬架系统E-ABC,48V电动液压泵
奔驰STAR3:底盘域:奔驰智能悬架系统E-ABC,奔驰魔毯悬挂
奔驰STAR3:底盘域:PRE-SAFE自动抬升车身
奔驰STAR3:冗余设计:双电源的系统设计
奔驰STAR3:座舱域:CIVIC 座舱域控,基于高通SA8295P
奔驰STAR3:智驾域:与英伟达和Momenta合作开发
奔驰汽车下一代MB.EA架构:底盘域:线控转向系统及半辐方向盘
奔驰汽车下一代MB.EA架构:底盘域:线控转向安全冗余
奔驰汽车下一代MB.EA架构:座舱域:高通骁龙至尊座舱(Elite Cockpit)芯片SA8397P
4.3 宝马汽车
宝马汽车E/E架构演进Roadmap
宝马汽车(分车型平台)E/E架构
宝马下一代E/E架构:计算平台:四个「超级大脑」
宝马下一代E/E架构:座舱域:AI智能体布局
宝马下一代E/E架构:软件:AI决策
宝马下一代E/E架构:软件:云服务,网络防护
宝马下一代E/E架构:软件:云服务,OTA与共享服务层
宝马下一代E/E架构:软件:软件规模与开发模式
宝马下一代E/E架构:软件:能源管理
4.4 大众汽车
大众汽车(分车型平台)E/E架构
大众(奥迪)汽车(分车型平台)E/E架构
大众汽车E/E架构:全面引入小鹏CEA架构
大众汽车E/E架构:CEA架构的中央计算平台优势
大众汽车E/E架构:CMP平台+CEA架构将支持大众(中国)系列新车型开发
大众汽车E/E架构:组建VCTC,统筹研发资源
大众汽车E/E架构:小鹏图灵芯片和第二代VLA智驾系统获得大众定点
大众汽车E/E架构:酷睿程(CARIZON)将推出自研SoC
大众E/E架构(燃油车):放弃MQB架构,全面引入小鹏CEA架构 (1)
大众E/E架构(燃油车):放弃MQB架构,全面引入小鹏CEA架构 (2)
大众E/E架构(燃油车):放弃MQB架构,全面引入小鹏CEA架构 (3)
4.5 丰田汽车
丰田汽车新能源专属平台:中大型车高兼容性平台 & 中小型车专用平台
丰田汽车(分车型平台)E/E架构
先进E/E架构演进及供应链搭建:丰田汽车 (1)
先进E/E架构演进及供应链搭建:丰田汽车 (2)
先进E/E架构演进及供应链搭建:丰田汽车 (3)
丰田汽车下一代E/E架构:全域AI
4.6 通用汽车
通用汽车逍遥超级融合架构
通用汽车逍遥超级融合架构:跨域联动
通用汽车逍遥超级融合架构:座舱域:搭载新一代高通8775计算平台
通用汽车逍遥超级融合架构:座舱域:端云融合AI大模型中枢
通用汽车逍遥超级融合架构:智驾域:Momenta R6飞轮大模型
通用汽车逍遥超级融合架构:底盘域:全新智能底盘
通用汽车逍遥超级融合架构:底盘域:VMC 车辆运动控制系统 (1)
通用汽车逍遥超级融合架构:底盘域:VMC 车辆运动控制系统 (2)
4.7 福特汽车
福特汽车FNV架构
福特汽车FNV架构:智驾域:BlueCruise 1.5
福特汽车FNV架构:智驾域:AR远程操作系统(在研)
福特汽车FNV架构:底盘域:车身危险预知提醒
福特汽车FNV架构:座舱+智驾域:旅行路书
福特汽车FNV架构:座舱+动力域:户外娱乐功能
福特汽车FNV架构:车身域:天窗集成安全气囊
福特汽车FNV架构:动力域:LMR 电池(在研)