随着智驾等级的提高、整车系统向智能化升级,中国新能源乘用车对整车安全的要求越来越高。
•在功能安全上,不仅要求整车可以精准检测与识别障碍物,还要求具备故障自诊断能力,当检测到系统故障时能迅速采取措施保证行车安全。此外,整车还需要根据环境信息和车辆状态,实时评估智能驾驶的风险,并采取相应措施降低风险。
•同时,底盘线控化、驱动一体化以及域控制器融合等发展也对整车安全提出了更高要求,整车冗余设计需要覆盖到各个系统,目前仍是以硬件备份为主。
智能汽车七重冗余架构设计框架

来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
底盘系统:向智能化升级,要求实现高度冗余化
其中,底盘系统作为汽车安全可靠的运行载体,其技术正在从传统向智能升级,通过机电一体化改造和系统集成化控制,实现各子系统深度协同与快速响应,支撑新能源汽车高级别智能驾驶和电动化、智能化发展。在此背景下,整车功能安全等级也随之提高,电动汽车底盘系统要求实现高度冗余化,目前主要以线控转向、线控制动、主动悬架为主:
•线控转向:包括后轮线控转向、前轮线控转向、手感模拟单元以及相应的冗余控制;
•线控制动:包括Two-box、One-box、EMB,以及相应的冗余控制和解耦技术;
•主动悬架:包括CDC减震、空气弹簧、纯电动主动悬架、纯液压主动悬架。
智能汽车底盘冗余趋势演进
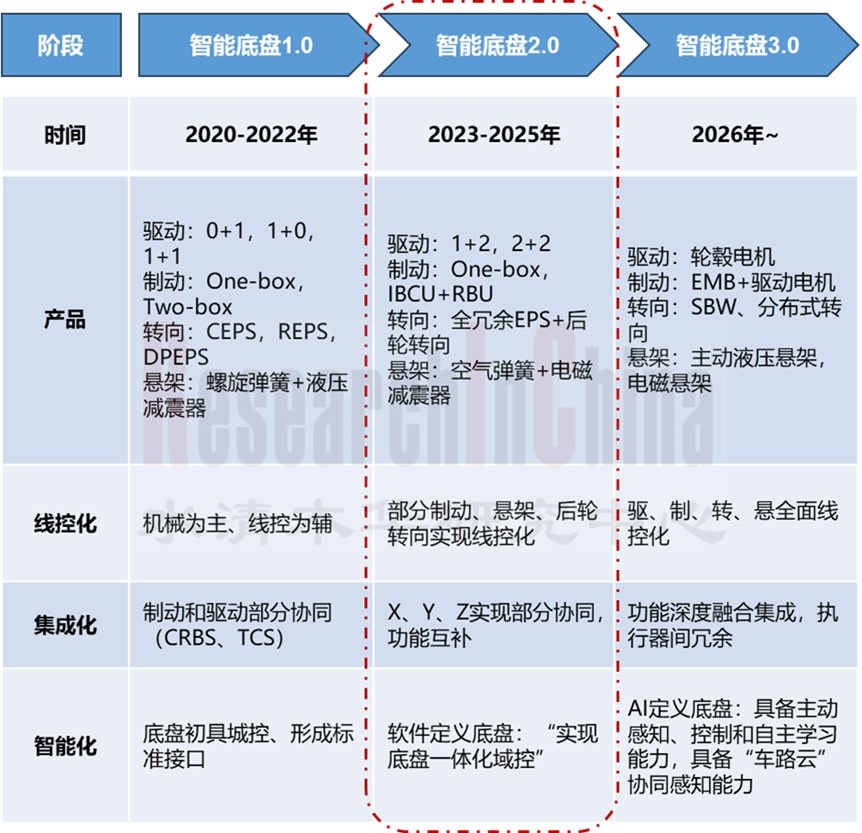
来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
线控转向基本上脱离了机械式的转向,其控制信号来源可能是底盘域控制器,也可能来源于智能驾驶,也可能来源于驾驶员方向盘的直接操作。因此,冗余设计是线控转向的标准配置,在脱离了驾驶员和脱离了机械直接干预的情况下,冗余系统进行备份或者提供一定功能或进行智能特征的性能优化。
博世华域最新的48V全域转向方案结合了蜗轮蜗杆线控上转方案和后轮转向于一体的方案,其中,新一代48V直驱线控转向系统通过双重技术创新实现底盘操控性能突破:
•最大可提供15.5 Nm的输出扭矩
•无扭杆直驱结构方案提升上转刚性,强化转向操控精度
•通过减小转弯半径来提升驾驶操纵的舒适性
•通过与制动系统协同,实现整车原地转向
•前转向系统EPS失效后,后轮转向可作为临时转向备份
同时,该方案基于「合平台」的双冗余设计满足L3及以上高度智能驾驶需求。采用了双控制器+六向电机的全冗余架构,从供电、通信到执行器都有备份系统,即使主系统出现故障,备用系统都能在毫秒级内接管,确保转向功能不中断。该方案将于2026年内搭载客户项目实现量产。
博世华域48V全域转向方案
来源:网络
线控制动系统也是取消了制动踏板和制动器之间的机械连接,通过踏板传感器采集驾驶员制动意图或者通过整车通讯网络接收智能驾驶控制器的制动请求,进而由制动控制单元ECU处理电子信号并控制制动执行机构输出制动力。
根据制动执行机构的不同,线控制动系统可以分为液压式线控制动系统(EHB)和机械式线控制动系统(EMB)。
•EHB以传统的液压制动系统为基础,用电子器件替代了部分机械部件的功能,使用制动液作为动力传递媒介,同时具备液压备份制动系统,是目前的主流技术方案。根据集成度的高低,EHB分为Two-box和One-box两种技术方案。
•EMB则用四个由电机驱动的轮端卡钳取代了主缸液压系统,在保留EHB系统优势的同时,进一步释放了制动系统零部件的布置自由度,同时也简化了整车装配和后期维护的流程和成本。但EMB依然存在不少技术难点需要攻克,其冗余设计就尤其复杂。目前以前轴EHB、后轴EMB的互为冗余的线控制动系统方案为主,也被称为混合线控制动系统(HBBW),伯特利、利氪科技、千顾科技等国内供应商均已推出自研方案,但上车的寥寥无几。
智能汽车底盘-线控制动系统冗余设计方案
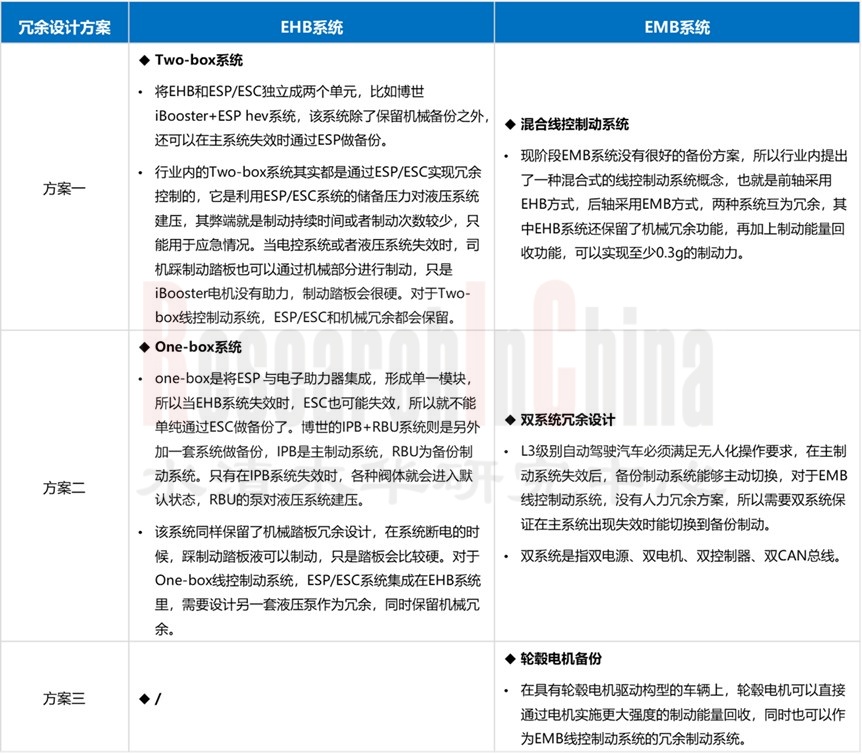
来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
零跑D19采用大陆集团的MK C2 线控制动系统(EHB One-box方案),其采用双轴液压制动系统,同时集成电子驻车制动EPB;软件层面包含了ABS防抱死制动系统、TCS牵引力控制系统、ESP电子稳定程序等增强性功能,同时具备智能执行器,可以搭配分离式功能制动软件。
MK C2 制动系统在体积上更紧凑、重量更轻、成本效益更高,且性能表现优于前代产品,MK C2 在发生故障时仍能保持更稳定的性能。此外,MK C2 制动系统可以加装HAD扩展模块,升级为MK C2 HAD系统,从而可以支持L2+及以上智能驾驶场景的制动冗余控制。
驱动系统:向分布式演进,轮毂电机/角模块或成最终形态
随着驱动电机及其控制系统性能的持续提升,单一的集中式驱动(前/后置单电机)已无法满足智能需求,分布式多电机驱动系统(将驱动电机直接集成于车轮或轮边)应势出现。一方面,分布式电机系统可与智能底盘深度耦合,实现性能提升与构型创新。另一方面,随着新能源汽车技术的进一步发展,多电机驱动系统的趋势将向“更精准、更智能、更高效”方向演进:
•双电机分布式驱动:更多采用“同轴双电机”布局,提升扭矩矢量控制精度,进一步降低能耗;
•三电机四驱:将优化前桥电机的布局(如集成至前桥),减少传动轴的机械损耗,提升动力传递效率;
•四电机四驱:将结合AI算法(如机器学习),实现“预测性扭矩控制”(如提前预判路况调整扭矩),进一步提升操控性与安全性;同时,轮毂电机的普及(如比亚迪仰望U8的轮毂电机)将取消减速器,进一步缩短动力传递路径,提升效率。
智能汽车分布式驱动系统冗余方案

来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
轮边电机和轮毂电机是分布式驱动的两条重要技术路线,轮边电机工程设计难度较低,乘用车市场以东风为代表开始搭载车型上市;而轮毂电机的工程化技术仍需突破,在乘用车大规模量产应用尚不成熟,目前仅比亚迪推出轮毂电机并搭载仰望车型上市。
不过东风奕派007轮毂电机版已完成申报,将成为国内首款实现量产的四轮轮毂电机车型。该车搭载由上海汽车电驱动有限公司生产的四台轮毂电机,单台电机最大功率100千瓦,系统综合功率达400千瓦。相比传统驱动形式,轮毂电机由于省去了传动轴、差速器等机械传动部件,可减少约30%的机械损耗,同时降低整车维护成本。
•四轮独立电机布局可实现精准的扭矩分配,使转弯半径缩小10%-15%,并支持毫秒级的动力响应;
•底盘布局的优化释放了更多空间,有助于提升电池容量和乘坐舒适性;
•能量回收系统也可实现四轮独立调节,回收效率提升约25%。

来源:网络
此外,目前四轮全EMB技术成熟度不高,电机散热、制动力分配、控制算法、成本高等问题难以解决,短期内无法量产搭载。因此,完全EMB系统趋向于与轮毂电机一体化,走集成式角模块路线,可适配滑板底盘及智能驾驶。
角模块是将驱动(轮毂电机/轮边电机)、制动(线控制动/EMB)、转向(线控转向/四轮独立转向)、悬架(主动悬架/空气弹簧)四大系统集成为单一模块,通过标准化接口与车身连接,实现车辆四轮独立控制(4WID-4WIS)及全场景运动能力(如原地转向、横向平移、斜行等)。
分布式线控角模块驱动车辆在多领域多场景下发挥作用,解决了传统底盘驱动车辆的动力失效问题、特殊路径规划问题。单个电动动力单元失效后采用转矩重分配方式实现冗余驱动。
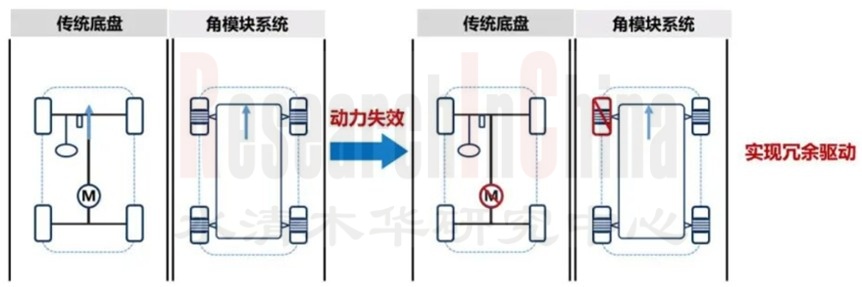
来源:网络
目前,角模块技术已从理论探索进入产业化初期阶段,国内外供应商舍弗勒、保隆科技、浙江世宝、同驭汽车等企业计划2025-2027年实现角模块量产。应用场景上,低速无人车和特种车辆将率先采用,乘用车领域预计2026年后逐步落地。目前,华为、智己、比亚迪、吉利、上汽等车企正在积极布局角模块驱动技术。
例如,华为角模块方案的核心创新点在于将各电机的控制功能高度集成于一个轮边控制器中,大幅减少控制芯片和独立控制器的数量。通过统一的通信接口、动力电池接口、低压电池接口及多个电流输出接口,实现对驱动、制动、转向及悬架电机的集中供电与控制。同时采用双控制芯片架构(如一个控制驱动与悬架电机,另一个控制制动与转向电机),并具备相互监测与故障容错能力。在制动控制芯片故障时,驱动控制芯片可指令驱动电机输出反向扭矩以实现制动冗余。
智能汽车角模块驱动技术量产规划

来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
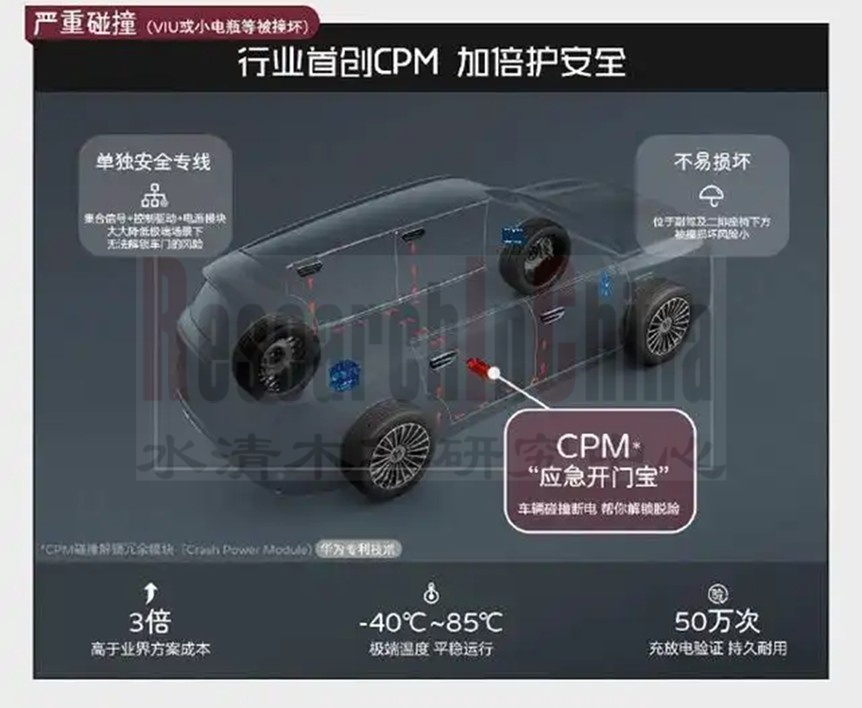
碰撞解锁:冗余模块CPM解决电子门把手碰撞后难解锁问题
另外,还有CPM(Collision Unlock Redundancy Module,碰撞解锁冗余模块),是华为独有的安全系统,用于严重碰撞事故下车辆解锁。简单来说,它在车辆发生碰撞时,自动解锁所有车门和后备箱,确保乘客和救援人员能快速进出。它融合了华为的碰撞检测算法、冗余硬件和实时监控,打造了一套“双保险”机制。
CPM采用独立电源设计,每个门都配置CPM模块保证任何碰撞场景每个门都能解锁成功。同时,CPM与其他安全功能无缝集成,如AEB(自动紧急制动)和疲劳监测。当AEB触发但未避免碰撞时,CPM可实现预碰撞解锁;反之,碰撞数据会反馈给AEB算法,优化未来响应。
根据内部测试,CPM在100km/h正面碰撞中,解锁成功率达100%,平均耗时0.15秒。目前,问界M8纯电版全系、尚界H5、智界R7和S7等车型均搭载了CPM。
来源:华为
供应商方面,2025年,安波福推出了类似产品——应急自动解锁控制器(Crash Power Module,CPM),一旦车辆发生碰撞,它能以微秒级的速度迅速响应,即刻启动冗余解锁功能,通过协同设计实现前后门锁、门把手锁和儿童锁等所有车门同步解锁。即使车辆不幸遭遇电源故障,其独立电源模块仍可持续稳定工作,为车门解锁提供充足能量,确保解锁功能万无一失。

来源:网络
CPM的兴起,直接回应了公众对新能源汽车(尤其是采用电子门把手车型)在严重碰撞后“车门锁死”安全隐患的深切担忧,虽然这项技术目前已从高端车型下沉到15万元级以上车型,但相比常规方案例如配置机械把手,不存在成本优势,因此CPM模块短时间内不会大规模量产,但未来随着成本降低、搭载车型增多、供应链成熟以及高阶智驾对安全需求的提高,CPM模块的市场规模呈现上升趋势,佐思汽研预测,中国新能源乘用车市场,2030年CPM模块的市场规模会突破10亿元。
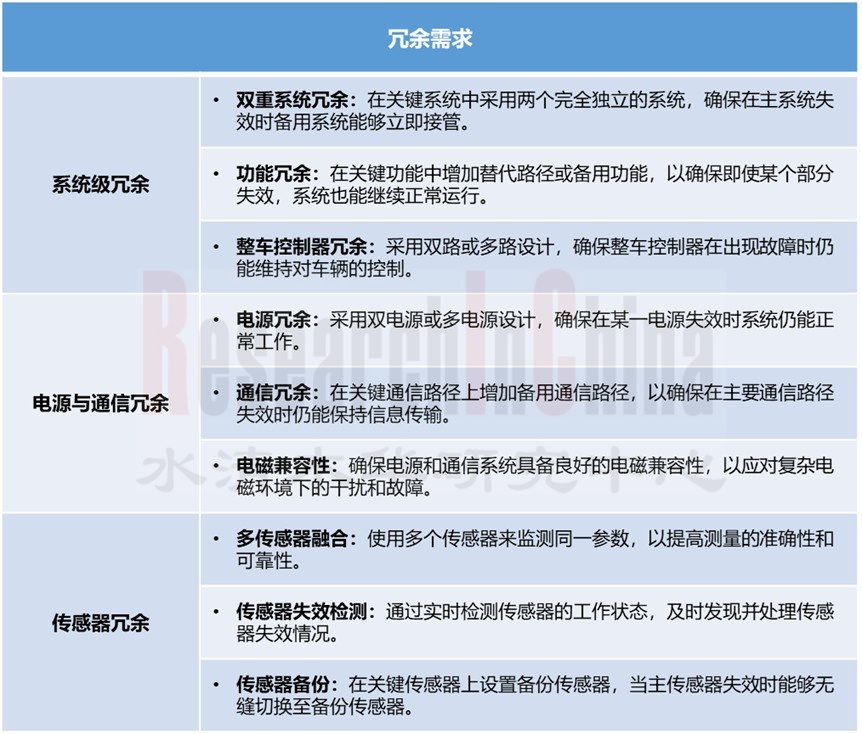
L3级有条件智能驾驶加速落地,冗余需求覆盖整车系统
根据《汽车驾驶自动化分级》国家标准,L3级为“有条件智能驾驶”,在特定场景(如高速公路)下,系统可完全接管驾驶任务,独立完成变道、超车等操作,责任主体从人转向车。
因此,L3级有条件智能驾驶对整车安全要求较高,冗余需求覆盖驱动、制动、转向、感知、计算、通信和电源等各个系统,确保某个系统出现故障时,整车能迅速采取措施保证驾驶安全。
L3级有条件智能驾驶冗余需求
来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
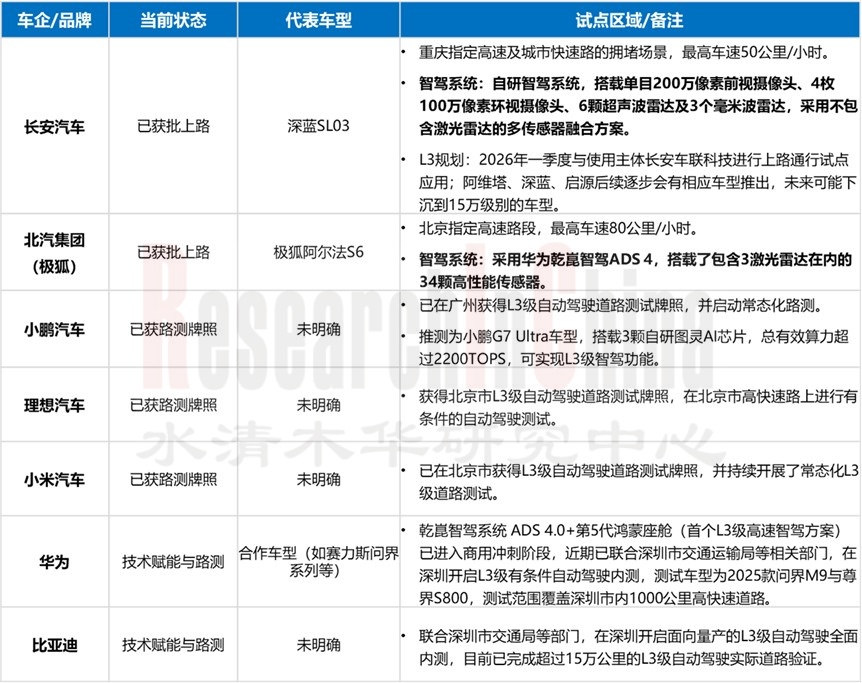
2025年12月,中国首批L3级有条件智能驾驶车型正式获得准入许可,极狐阿尔法S6、长安深蓝SL03即将分别在北京、重庆指定区域开展上路试点,标志着中国乘用车市场L3级有条件智能驾驶开始落地。同时,理想、比亚迪、小鹏、小米等车企正在积极开展L3级有条件智能驾驶车型道路测试,推进旗下L3级车型上路试点进程。
主机厂L3级有条件智能驾驶汽车上路试点
来源:佐思汽研《2025-2026年智能汽车冗余架构设计及辅助驾驶冗余策略研究报告》
01 智能汽车各子系统的冗余设计策略与政策标准
1.1 智能汽车冗余架构定义和概述
智能汽车冗余架构及七大冗余策略分类(1)
智能汽车冗余架构及七大冗余策略分类(2)
乘用车整车安全冗余架构系统设计(1)
乘用车整车安全冗余架构系统设计(2)
乘用车整车安全冗余架构系统设计(3)
1.2 智能汽车各子系统的冗余策略总结
乘用车安全冗余架构系统设计(1)
乘用车安全冗余架构系统设计(2)
乘用车安全冗余架构系统设计(3)
乘用车L3级有条件智能驾驶车型布局情况
乘用车L3级有条件智能驾驶准入车型智驾方案和冗余策略
乘用车L3级有条件智能驾驶对整车控制的性能需求(1)
乘用车L3级有条件智能驾驶对整车控制的性能需求(2)
......
乘用车各子系统的冗余策略(1)
乘用车各子系统的冗余策略(2)
乘用车底盘冗余发展趋势(1)
乘用车底盘冗余发展趋势(2)
......
乘用车驱动冗余发展趋势(1)
乘用车驱动冗余发展趋势(2)
......
乘用车计算冗余发展趋势(1)
乘用车计算冗余发展趋势(2)
......
乘用车通信冗余发展趋势
乘用车电源冗余发展趋势(1)
乘用车电源冗余发展趋势(2)
1.3 智能汽车各子系统的政策标准
国内外乘用车制动系统的政策标准
中国乘用车制动系统的最新标准(1)
中国乘用车制动系统的最新标准(2)
国内外乘用车转向系统的政策标准
中国乘用车转向系统的最新标准(1)
中国乘用车转向系统的最新标准(2)
中国乘用车底盘系统的政策标准
中国乘用车底盘系统的最新标准一
中国乘用车底盘系统的最新标准二
02 智能汽车各子系统的冗余设计方案
2.1 智能底盘系统及冗余设计方案
智能底盘系统及其演进过程
智能底盘系统的发展趋势一
智能底盘系统的发展趋势二(1)
智能底盘系统的发展趋势二(2)
智能底盘系统的发展趋势二(3)
智能底盘系统的发展趋势三(1)
智能底盘系统的发展趋势三(2)
智能底盘系统的冗余设计(1)
智能底盘系统的冗余设计(2)
智能底盘系统的应用车型
主机厂智能底盘系统的冗余设计方案总结(1)
主机厂智能底盘系统的冗余设计方案总结(2)
主机厂智能底盘系统的冗余设计方案总结(3)
供应商智能底盘系统的冗余设计方案一(1)
供应商智能底盘系统的冗余设计方案一(2)
供应商智能底盘系统的冗余设计方案二
供应商智能底盘系统的冗余设计方案三
2.2 线控转向系统及冗余设计方案
转向系统的分类:电动助力转向(EPS)(1)
转向系统的分类:电动助力转向(EPS)(2)
转向系统的分类:电动助力转向(EPS)(3)
EPS系统的冗余设计方案总结:主要供应商/主机厂及技术应用
转向系统的分类:线控转向(SBW)(1)
.............
转向系统的分类:线控转向(SBW)(5)
转向系统的分类:线控转向(SBW)(6)
SBW系统的冗余设计一(1)
SBW系统的冗余设计一(2)
SBW系统的冗余设计二(1)
SBW系统的冗余设计二(2)
SBW系统的冗余设计三
SBW系统的冗余设计四
SBW系统的冗余设计方案总结:主要供应商及技术应用
SBW系统的冗余设计方案一
SBW系统的冗余设计方案二
SBW系统的冗余设计方案三
SBW系统的冗余设计方案四
2.3 线控制动系统及冗余设计方案
线控制动系统(BBWS)
线控制动系统的分类:液压式线控制动(EHB)
线控制动系统的分类:机械式线控制动(EMB)(1)
线控制动系统的分类:机械式线控制动(EMB)(2)
线控制动系统的分类:液压式线控制动(EHB)VS 机械式线控制动(EMB)
线控制动系统的技术需求与冗余要求
线控制动系统的冗余设计(1)
线控制动系统的冗余设计(2)
线控制动系统的冗余设计方案
EHB系统的冗余设计一(1)
EHB系统的冗余设计一(2)
EHB系统的冗余设计二(1)
EHB系统的冗余设计二(2)
EHB系统的冗余设计方案对比
EHB系统的冗余设计方案总结:主要供应商及技术应用
EHB系统的冗余设计方案一
.............
EHB系统的冗余设计方案四
EHB系统的冗余设计方案五
EMB系统的冗余设计一
EMB系统的冗余设计二
EMB系统的冗余设计方案对比
EMB系统的冗余设计方案总结:主要供应商及技术应用
EMB系统的冗余设计方案一(1)
EMB系统的冗余设计方案一(2)
EMB系统的冗余设计方案二
EMB系统的冗余设计方案三
EMB系统的冗余设计方案四
EMB系统的冗余设计方案五
2.4 智能悬架系统及冗余设计方案
智能悬架系统
智能悬架系统的分类(1)
智能悬架系统的分类(2)
.............
智能悬架系统的分类(6)
智能悬架系统的零部件一
智能悬架系统的零部件二(1)
智能悬架系统的零部件二(2)
智能悬架系统的冗余设计
智能悬架系统的冗余设计方案总结:主机厂的解决方案
智能悬架系统的冗余设计方案一(1)
智能悬架系统的冗余设计方案一(2)
智能悬架系统的冗余设计方案二
智能悬架系统的冗余设计方案三
智能悬架系统的冗余设计方案四
2.5 动力域及其冗余设计方案
线控驱动系统
线控驱动系统的核心技术
线控驱动系统的发展需求
线控驱动系统的冗余设计
线控驱动系统的架构设计(1)
线控驱动系统的架构设计(2)
.............
线控驱动系统的架构设计(5)
线控驱动系统的冗余设计一
线控驱动系统的冗余设计二(1)
线控驱动系统的冗余设计二(2)
线控驱动系统的冗余设计二(3)
线控驱动系统的冗余设计三(1)
线控驱动系统的冗余设计三(2)
线控驱动系统的冗余设计三(3)
线控驱动系统的冗余设计三(4)
线控驱动系统的冗余设计方案一
线控驱动系统的冗余设计方案二
线控驱动系统的冗余设计方案三
线控驱动系统的冗余设计方案四
线控驱动系统的冗余设计方案五
2.6 智驾域及其冗余设计方案
智驾域的冗余设计方案
智驾域的冗余设计一(1)
智驾域的冗余设计一(2)
.............
智驾域的冗余设计一(5)
智驾域的冗余设计二
智驾域的冗余设计三(1)
智驾域的冗余设计三(2)
智驾域的冗余设计方案总结:主要供应商的解决方案
智驾域的冗余设计方案总结:主机厂的解决方案(1)
智驾域的冗余设计方案总结:主机厂的解决方案(2)
智驾域的冗余设计方案一
智驾域的冗余设计方案二
智驾域的冗余设计方案三
智驾域的冗余设计方案四
2.7 通信系统及其冗余设计方案
电动汽车的通信系统
通信系统的冗余设计一
通信系统的冗余设计二(1)
通信系统的冗余设计二(2)
通信系统的冗余设计方案总结:主机厂的解决方案
通信系统的冗余设计方案一
通信系统的冗余设计方案二
.............
通信系统的冗余设计方案六
2.8 低压电源系统及其冗余设计方案
电动汽车E/E架构对电源系统的性能需求(1)
电动汽车E/E架构对电源系统的性能需求(2)
低压电源系统的冗余设计一(1)
低压电源系统的冗余设计一(2)
.............
低压电源系统的冗余设计一(5)
12V电源系统的冗余设计方案(1)
12V电源系统的冗余设计方案(2)
低压电源系统的冗余设计二(1)
低压电源系统的冗余设计二(2)
低压电源系统的冗余设计二(3)
低压电源系统的冗余设计二(4)
48V电源系统的冗余设计方案(1)
48V电源系统的冗余设计方案(2)
48V电源系统的冗余设计方案(3)
2.9 新兴冗余模块:角模块
角模块驱动技术(1)
.............
角模块驱动技术(5)
角模块驱动技术(6)
角模块的冗余设计方案总结:核心供应商产品技术方案
角模块的冗余设计方案一
角模块的冗余设计方案二
角模块的冗余设计方案三
角模块的冗余设计方案四
角模块的冗余设计方案五
角模块的冗余设计方案六
中国新能源乘用车角模块的市场规模和渗透率预测,2026-2030年
中国新能源乘用车角模块的市场规模和渗透率预测,2026-2030年-附测算表
2.10 新兴冗余模块:CPM
CPM(碰撞解锁冗余模块)(1)
CPM(碰撞解锁冗余模块)(2)
CPM的政策标准
CPM的冗余设计方案一
CPM的冗余设计方案二
中国新能源乘用车CPM模块的市场规模和渗透率预测,2025-2030年
中国新能源乘用车CPM模块的市场规模和渗透率预测,2025-2030年-附数据表
03 国内外主机厂冗余架构设计及辅助驾驶冗余策略
3.1 蔚来汽车
蔚来汽车E/E架构:核心系统及冗余设计方案
蔚来汽车智驾域:核心系统及冗余设计方案
蔚来汽车底盘域:核心系统及冗余设计方案(1)
蔚来汽车底盘域:核心系统及冗余设计方案(2)
蔚来汽车动力域:核心系统及冗余设计方案
蔚来汽车代表车型的创新功能总结
蔚来ET9冗余设计(1)
蔚来ET9冗余设计(2)
蔚来ET9冗余设计(3)
蔚来ET9冗余设计(4)
蔚来ET9冗余设计(5)
蔚来ET9/第三代ES8冗余设计
蔚来第三代ES8冗余设计
3.2 小鹏汽车
小鹏汽车E/E架构:核心系统及冗余设计方案
小鹏汽车智驾域:核心系统及冗余设计方案(1)
小鹏汽车智驾域:核心系统及冗余设计方案(2)
小鹏汽车底盘域:核心系统及冗余设计方案(1)
小鹏汽车底盘域:核心系统及冗余设计方案(2)
小鹏汽车动力域:核心系统及冗余设计方案
小鹏汽车代表车型的创新功能总结
小鹏G7冗余设计(1)
小鹏G7冗余设计(2)
小鹏G7冗余设计(3)
小鹏G7冗余设计(4)
3.3 理想汽车
理想汽车E/E架构:核心系统及冗余设计方案
理想汽车智驾域:核心系统及冗余设计方案(1)
理想汽车智驾域:核心系统及冗余设计方案(2)
理想汽车底盘域:核心系统及冗余设计方案(1)
理想汽车底盘域:核心系统及冗余设计方案(2)
理想汽车底盘域:核心系统及冗余设计方案(3)
理想汽车动力域:核心系统及冗余设计方案
理想汽车LEEA3.0冗余设计
理想汽车LEEA2.5冗余设计
理想L9智能焕新版冗余设计
理想i6冗余设计
3.4 小米汽车
小米汽车E/E架构:核心系统及冗余设计方案(1)
小米汽车E/E架构:核心系统及冗余设计方案(2)
小米汽车智驾域:核心系统及冗余设计方案
小米汽车底盘域:核心系统及冗余设计方案(1)
小米汽车底盘域:核心系统及冗余设计方案(2)
小米汽车动力域:核心系统及冗余设计方案
小米汽车代表车型的创新功能总结
小米YU7冗余设计(1)
小米YU7冗余设计(2)
......
小米YU7冗余设计(6)
小米SU7冗余设计
小米SU7 Ultra冗余设计
小米汽车EEA3.0冗余设计(1)
小米汽车EEA3.0冗余设计(2)
3.5 零跑汽车
零跑汽车E/E架构:核心系统及冗余设计方案
零跑汽车智驾域:核心系统及冗余设计方案
零跑汽车底盘域:核心系统及冗余设计方案(1)
零跑汽车底盘域:核心系统及冗余设计方案(2)
零跑汽车底盘域:核心系统及冗余设计方案(3)
零跑汽车动力域:核心系统及冗余设计方案
零跑汽车代表车型的创新功能总结
零跑汽车D平台冗余设计(1)
零跑汽车D平台冗余设计(2)
......
零跑汽车D平台冗余设计(7)
零跑汽车B/C平台冗余设计(1)
零跑汽车B/C平台冗余设计(2)
零跑汽车B平台冗余设计
3.6 奇瑞汽车
奇瑞汽车E/E架构:核心系统及冗余设计方案
奇瑞汽车智驾域:核心系统及冗余设计方案
奇瑞汽车底盘域:核心系统及冗余设计方案(1)
奇瑞汽车底盘域:核心系统及冗余设计方案(2)
奇瑞汽车底盘域:核心系统及冗余设计方案(3)
奇瑞汽车动力域:核心系统及冗余设计方案
奇瑞汽车云台智能底盘规划
奇瑞汽车冗余设计(1)
奇瑞汽车冗余设计(2)
奇瑞汽车冗余设计(3)
奇瑞汽车冗余设计(4)
奇瑞星途ET5冗余设计(1)
奇瑞星途ET5冗余设计(2)
奇瑞星途ET5冗余设计(3)
奇瑞星纪元ES冗余设计
奇瑞纵横G700冗余设计
奇瑞风云A9L冗余设计
奇瑞汽车EEA6.0冗余设计(1)
奇瑞汽车EEA6.0冗余设计(2)
奇瑞汽车EEA5.0冗余设计(1)
奇瑞汽车EEA5.0冗余设计(2)
......
奇瑞汽车EEA5.0冗余设计(8)
奇瑞汽车L4 级 Robocar冗余设计:全冗余硬件架构
3.7 智己汽车
智己汽车E/E架构:核心系统及冗余设计方案
智己汽车智驾域:核心系统及冗余设计方案
智己汽车底盘域:核心系统及冗余设计方案(1)
智己汽车底盘域:核心系统及冗余设计方案(2)
智己汽车动力域:核心系统及冗余设计方案
智己汽车代表车型的创新功能总结
智己汽车整车安全技术演进趋势
智己汽车底盘演进趋势
智己汽车底盘冗余设计(1)
智己汽车底盘冗余设计(2)
智己LS9冗余设计(1)
.............
智己LS9冗余设计(5)
智己LS6/L6冗余设计
智己L6冗余设计(1)
智己L6冗余设计(2)
3.8 极氪汽车
极氪汽车E/E架构:核心系统及冗余设计方案
极氪汽车智驾域:核心系统及冗余设计方案(1)
极氪汽车智驾域:核心系统及冗余设计方案(2)
极氪汽车底盘域:核心系统及冗余设计方案(1)
极氪汽车底盘域:核心系统及冗余设计方案(2)
极氪汽车底盘域:核心系统及冗余设计方案(3)
极氪汽车动力域:核心系统及冗余设计方案
极氪汽车代表车型的创新功能总结
吉利汽车冗余设计
吉利汽车EE 3.0冗余设计(1)
吉利汽车EE 3.0冗余设计(2)
......
吉利汽车EE 3.0冗余设计(12)
极氪9X冗余设计(1)
极氪9X冗余设计(2)
......
极氪9X冗余设计(6)
极氪001 FR冗余设计(1)
极氪001 FR冗余设计(2)
极氪001 FR冗余设计(3)
吉利银河M9冗余设计(1)
吉利银河M9冗余设计(2)
吉利银河M9冗余设计(1)
吉利银河M9冗余设计(2)
吉利银河M9冗余设计(3)
3.9 岚图汽车
岚图汽车E/E架构:核心系统及冗余设计方案
岚图汽车智驾域:核心系统及冗余设计方案
岚图汽车底盘域:核心系统及冗余设计方案(1)
岚图汽车底盘域:核心系统及冗余设计方案(2)
岚图汽车底盘域:核心系统及冗余设计方案(3)
岚图汽车动力域:核心系统及冗余设计方案
岚图汽车代表车型的创新功能总结
岚图汽车天元智架
岚图汽车天元智架冗余设计(1)
岚图汽车天元智架冗余设计(2)
......
岚图汽车天元智架冗余设计(6)
岚图泰山冗余设计
岚图FREE+冗余设计(1)
岚图FREE+冗余设计(2)
岚图FREE+冗余设计(3)
岚图FREE+冗余设计(4)
东风汽车冗余设计
东风奕派007冗余设计
3.10 比亚迪
比亚迪E/E架构:核心系统及冗余设计方案
比亚迪智驾域:核心系统及冗余设计方案
比亚迪底盘域:核心系统及冗余设计方案(1)
比亚迪底盘域:核心系统及冗余设计方案(2)
比亚迪底盘域:核心系统及冗余设计方案(3)
比亚迪动力域:核心系统及冗余设计方案
比亚迪代表车型的创新功能总结
比亚迪璇玑架构冗余设计(1)
比亚迪璇玑架构冗余设计(2)
比亚迪璇玑架构冗余设计(3)
比亚迪超级e平台3.0冗余设计(1)
比亚迪超级e平台3.0冗余设计(2)
比亚迪云辇车身控制系统
比亚迪云辇车身控制系统技术版本
比亚迪云辇车身控制系统冗余设计(1)
比亚迪云辇车身控制系统冗余设计(2)
......
比亚迪云辇车身控制系统冗余设计(6)
仰望U7冗余设计(1)
仰望U7冗余设计(2)
比亚迪线控转向系统冗余设计
3.11 华为“界”系列
华为“界”系列E/E架构:核心系统及冗余设计方案
华为“界”系列智驾域:核心系统及冗余设计方案
华为“界”系列底盘域:核心系统及冗余设计方案(1)
华为“界”系列底盘域:核心系统及冗余设计方案(2)
华为“界”系列动力域:核心系统及冗余设计方案
华为“界”系列代表车型的创新功能总结
尊界S800冗余设计(1)
尊界S800冗余设计(2)
......
尊界S800冗余设计(9)
享界9系冗余设计
华为“界”系列冗余设计(1)
华为“界”系列冗余设计(2)
......
华为“界”系列冗余设计(6)
问界系列冗余设计(1)
问界系列冗余设计(2)
问界系列冗余设计(3)
3.12 长安汽车
长安汽车E/E架构:核心系统及冗余设计方案
长安汽车智驾域:核心系统及冗余设计方案
长安汽车底盘域:核心系统及冗余设计方案(1)
长安汽车底盘域:核心系统及冗余设计方案(2)
长安汽车底盘域:核心系统及冗余设计方案(3)
长安汽车动力域:核心系统及冗余设计方案
长安汽车L3级智能驾驶冗余设计
长安汽车冗余设计
长安汽车SDA架构冗余设计(1)
长安汽车SDA架构冗余设计(2)
......
长安汽车SDA架构冗余设计(7)
长安深蓝L06冗余设计
阿维塔冗余设计
阿维塔07冗余设计(1)
阿维塔07冗余设计(2)
阿维塔07冗余设计(3)
阿维塔07冗余设计(4)
3.13 长城汽车
长城汽车E/E架构:核心系统及冗余设计方案
长城汽车智驾域:核心系统及冗余设计方案
长城汽车底盘域:核心系统及冗余设计方案(1)
长城汽车底盘域:核心系统及冗余设计方案(2)
长城汽车底盘域:核心系统及冗余设计方案(3)
长城汽车动力域:核心系统及冗余设计方案
长城GEEP 4.0冗余设计(1)
长城GEEP 4.0冗余设计(2)
......
长城GEEP 4.0冗余设计(6)
坦克700 Hi4-T冗余设计(1)
坦克700 Hi4-T冗余设计(2)
3.14 一汽红旗
一汽红旗E/E架构:核心系统及冗余设计方案
一汽红旗智驾域:核心系统及冗余设计方案
一汽红旗底盘域:核心系统及冗余设计方案(1)
一汽红旗底盘域:核心系统及冗余设计方案(2)
一汽红旗动力域:核心系统及冗余设计方案
一汽红旗飞刃1.X架构冗余设计(1)
一汽红旗飞刃1.X架构冗余设计(2)
......
一汽红旗飞刃1.X架构冗余设计(9)
一汽红旗E-HS9冗余设计
一汽红旗HS6冗余设计
3.15 广汽集团
广汽集团E/E架构:核心系统及冗余设计方案
广汽集团智驾域:核心系统及冗余设计方案
广汽集团底盘域:核心系统及冗余设计方案(1)
广汽集团底盘域:核心系统及冗余设计方案(2)
广汽集团底盘域:核心系统及冗余设计方案(3)
广汽集团动力域:核心系统及冗余设计方案
广汽GA3.5冗余设计(1)
广汽GA3.5冗余设计(2)
......
广汽GA3.5冗余设计(12)
广汽L4级Robotaxi冗余设计
3.16 极狐汽车
极狐汽车E/E架构:核心系统及冗余设计方案
极狐汽车智驾域:核心系统及冗余设计方案
极狐汽车底盘域:核心系统及冗余设计方案
极狐汽车动力域:核心系统及冗余设计方案
极狐阿尔法T5冗余设计
北汽乘用车冗余设计(1)
北汽乘用车冗余设计(2)
3.17 特斯拉
特斯拉E/E架构:核心系统及冗余设计方案
特斯拉智驾域:核心系统及冗余设计方案
特斯拉底盘域:核心系统及冗余设计方案(1)
特斯拉底盘域:核心系统及冗余设计方案(2)
特斯拉Cybertruck冗余设计(1)
特斯拉Cybertruck冗余设计(2)
......
特斯拉Cybertruck冗余设计(6)
3.18 奔驰汽车
奔驰汽车E/E架构:核心系统及冗余设计方案
奔驰汽车智驾域/动力域:核心系统及冗余设计方案
奔驰汽车底盘域:核心系统及冗余设计方案
奔驰STAR3 Domain冗余设计(1)
.............
奔驰STAR3 Domain冗余设计(4)
奔驰STAR3 Domain冗余设计(5)
奔驰MB.EA冗余设计(1)
奔驰MB.EA冗余设计(2)
奔驰纯电GLC冗余设计
奔驰汽车冗余设计
3.19 宝马汽车
宝马汽车E/E架构:核心系统及冗余设计方案
宝马汽车底盘域/动力域:核心系统及冗余设计方案
宝马汽车代表车型的创新功能总结
宝马新世代车型全新四域架构(1)
宝马新世代车型全新四域架构(2)
宝马iX3冗余设计(1)
宝马iX3冗余设计(2)
宝马i4 M60冗余设计
3.20 大众集团
大众汽车E/E架构:核心系统及冗余设计方案
大众汽车智驾域:核心系统及冗余设计方案
大众汽车动力域/底盘域:核心系统及冗余设计方案
大众MEB平台冗余设计
大众ID.4 CROZZ冗余设计
大众ID.7 VIZZION冗余设计(1)
大众ID.7 VIZZION冗余设计(2)
大众ID.7 VIZZION冗余设计(3)
奥迪E5 Sportback冗余设计
大众L4级智驾方案冗余设计(1)
大众L4级智驾方案冗余设计(2)
3.21 丰田汽车
丰田汽车智驾域:核心系统及冗余设计方案
丰田汽车底盘域:核心系统及冗余设计方案
丰田汽车动力域:核心系统及冗余设计方案
丰田铂智 7冗余设计
丰田铂智 3X冗余设计(1)
丰田铂智 3X冗余设计(2)
3.22 上汽通用
上汽通用汽车E/E架构:核心系统及冗余设计方案
上汽通用汽车底盘域/动力域:核心系统及冗余设计方案
上汽通用汽车代表车型的创新功能总结
通用至境L7冗余设计(1)
通用至境L7冗余设计(2)
通用ATEV 工程概念车冗余设计(1)
.............
通用ATEV 工程概念车冗余设计(4)
通用ATEV 工程概念车冗余设计(5)
04 L4级智驾公司冗余架构设计及辅助驾驶冗余策略
L4智驾公司冗余架构设计及辅助驾驶冗余策略总结
4.1 百度Apollo
百度高级辅助驾驶冗余系统设计方案
百度星河架构平台
百度Apollo无人车冗余设计(1)
百度Apollo无人车冗余设计(2)
百度Apollo无人车冗余设计(3)
4.2 文远知行
文远知行高级辅助驾驶冗余系统设计方案
文远知行WeRide One
文远知行WeRide One冗余设计(1)
文远知行WeRide One冗余设计(2)
文远知行WeRide One搭载车型:Robotaxi GXR(1)
文远知行WeRide One搭载车型:Robotaxi GXR(2)
4.3 元戎启行
元戎启行高级辅助驾驶冗余系统设计方案
元戎启行DeepRoute-Driver冗余设计(1)
元戎启行DeepRoute-Driver冗余设计(2)
元戎启行DeepRoute-Driver冗余设计(3)
元戎启行DeepRoute IO冗余设计(1)
元戎启行DeepRoute IO冗余设计(2)
元戎启行DeepRoute IO冗余设计(3)
4.4 小马智行
小马智行高级辅助驾驶冗余系统设计方案
小马智行多传感器融合定位系统冗余设计
小马智行第六代智能驾驶系统冗余设计(1)
小马智行第六代智能驾驶系统冗余设计(2)
小马智行第七代智能驾驶系统冗余设计(1)
小马智行第七代智能驾驶系统冗余设计(2)
小马智行第七代智能驾驶系统冗余设计(3)
小马智行第三代智能驾驶卡车软硬件集成系统冗余设计
4.5 轻舟智航
轻舟智航高级辅助驾驶冗余系统设计方案
轻舟智航Driven-by-QCraft智能驾驶系统冗余设计(1)
轻舟智航Driven-by-QCraft智能驾驶系统冗余设计(2)
轻舟智航无人驾驶传感器套件冗余设计
轻舟智航L2+辅助驾驶系统冗余设计(1)
轻舟智航L2+辅助驾驶系统冗余设计(2)
轻舟智航L2+辅助驾驶系统冗余设计(3)
轻舟智航L2+辅助驾驶系统冗余设计(4)
4.6 Waymo
Waymo高级辅助驾驶冗余系统设计方案
Waymo智能驾驶系统冗余设计(1)
Waymo智能驾驶系统冗余设计(2)
Waymo卡车冗余设计(1)
Waymo卡车冗余设计(2)
Waymo第六代Driver系统冗余设计
05 国内外智能汽车各子系统供应商冗余架构设计
5.1 博世
博世线控制动系统:产品线和设计思路
博世线控制动系统:发展规划
博世线控制动系统:性能特点
博世线控制动系统冗余设计(1)
博世线控制动系统冗余设计(2)
......
博世线控制动系统冗余设计(6)
博世华域转向系统(1)
博世华域转向系统(2)
博世华域转向系统冗余设计(1)
博世华域转向系统冗余设计(2)
博世华域转向系统冗余设计(3)
5.2 大陆集团
大陆集团线控制动系统:产品线和设计思路
大陆集团线控制动系统冗余设计(1)
大陆集团线控制动系统冗余设计(2)
大陆集团线控制动系统冗余设计(3)
大陆集团线控制动系统冗余设计(1)
大陆集团线控制动系统冗余设计(2)
大陆集团线控制动系统冗余设计(3)
大陆集团角模块冗余设计
5.3 耐世特
耐世特的业务布局
耐世特线控转向/制动系统:产品线和设计思路
耐世特线控转向系统
耐世特线控转向系统冗余设计(1)
耐世特线控转向系统冗余设计(2)
耐世特线控制动系统冗余设计(3)
5.4 弗迪动力
弗迪动力线控制动系统冗余设计(1)
弗迪动力线控制动系统冗余设计(2)
弗迪动力线控制动系统冗余设计(3)
5.5 JTEKT
JTEKT线控转向系统:研发历程与专利布局
JTEKT线控转向系统(1)
JTEKT线控转向系统(2)
JTEKT线控转向系统冗余设计(1)
JTEKT线控转向系统冗余设计(2)
JTEKT线控转向系统冗余设计(3)
JTEKT线控转向系统冗余设计(4)
5.6 伯特利
伯特利的业务布局
伯特利线控制动系统:产品线和设计思路
伯特利的线控制动系统冗余设计(1)
伯特利的线控制动系统冗余设计(2)
伯特利的线控制动系统冗余设计(3)
5.7 威巴克
威巴克的业务布局
威巴克空气悬架系统冗余设计一
威巴克空气悬架系统冗余设计二
5.8 孔辉科技
孔辉科技的业务布局
孔辉科技空气悬架系统
孔辉科技空气悬架系统冗余设计(1)
孔辉科技空气悬架系统冗余设计(2)
5.9 保隆科技
保隆科技的业务布局
保隆科技空气悬架系统:产品线和设计思路
保隆科技空气悬架系统冗余设计
5.10 京西智行
京西智行的业务布局
京西智行产品线和设计思路
京西智行空气悬架系统冗余设计
京西智行线控制动系统冗余设计
5.11 采埃孚
采埃孚智能底盘系统:技术演进
采埃孚智能底盘2.0冗余设计(1)
采埃孚智能底盘2.0冗余设计(2)
......
采埃孚智能底盘2.0冗余设计(10)
采埃孚感知冗余设计
5.12 拓普集团
拓普集团的业务布局
拓普集团智能底盘系统:产品线和设计思路
拓普集团智能底盘系统冗余设计
拓普集团空气悬架系统冗余设计
拓普集团线控制动系统冗余设计
拓普集团线控转向系统冗余设计