具身智能机器人(即融合人工智能大模型与物理实体的新一代 AI 机器人) 正在经历从“计算智能”向“物理智能”的跨越。如果说大模型是机器人的“大脑”,那么通信网络则是其“神经系统”。具身智能机器人是一个高度复杂的分布式系统,其“大脑”需要毫秒级处理来自全身数十个传感器的海量异构数据,并向执行器下达微秒级同步指令。
在2026年这一关键节点,佐思汽研观察到机器人内部与外部通信架构正面临前所未有的重构。传统的工业机器人通信架构已逼近物理极限,从EtherCAT对CAN总线的降维打击,到区域化(Zonal)架构的物理变革,再到星闪(NearLink)等新协议的突围,通信芯片与模组市场正迎来爆发式增长。
《2026年下一代具身智能机器人通信网络拓扑及芯片行业研究报告》进行了深度具身智能机器人通信架构的产业链研究,包含了11家机器人本体厂商、12家国内通信模组厂商以及13家国外通信模组厂商,揭示了支撑下一代具身智能体的六大关键通信趋势。
趋势一:市场爆发与芯片专用化,通信模组将迎来近百亿增量
随着具身智能机器人步入量产前夜,通信链路的价值量正在经历一场从“通用工业件”向“专用核心件”的结构性重构。根据佐思汽研的最新测算,这一细分市场的通信模组与专用芯片需求将摆脱线性增长轨道,转入指数级爆发期。
特别是EtherCAT从站控制器(ESC),正成为驱动这一增长的核心增量逻辑。 与传统工业自动化不同,人形机器人单机拥有超过40个关节自由度,对通信节点的集成度与实时性要求极高。
如下表所示,仅具身智能机器人专用的通信市场规模,预计将从2026年的4200万美元迅速扩容至2030年的3亿美元左右。
此外,FPGA芯片在通信链路中的战略地位日益显著,逐渐形成“FPGA+MCU”的异构协同架构。凭借其独特的并行处理能力和纳秒级低延迟特性,FPGA(如Altera Agilex系列)正被广泛应用于高带宽的多传感器融合、硬实时工业总线协议转换以及复杂的电机控制回路中。
与此同时,市场对专用PHY芯片(物理层芯片)的需求也在激增。 面对机器人关节内部极度受限的空间与散热挑战,以裕太微、瑞萨电子为代表的领先厂商正加速推出具身智能定制版千兆/2.5G以太网PHY芯片。
这些芯片通过集成TSN(时间敏感网络)时钟同步特性、极致的低功耗设计以及晶圆级封装(WLCSP),正在重塑机器人内部通信的物理层标准。
全球具身智能机器人通信模组市场规模预估 (2026-2030年)
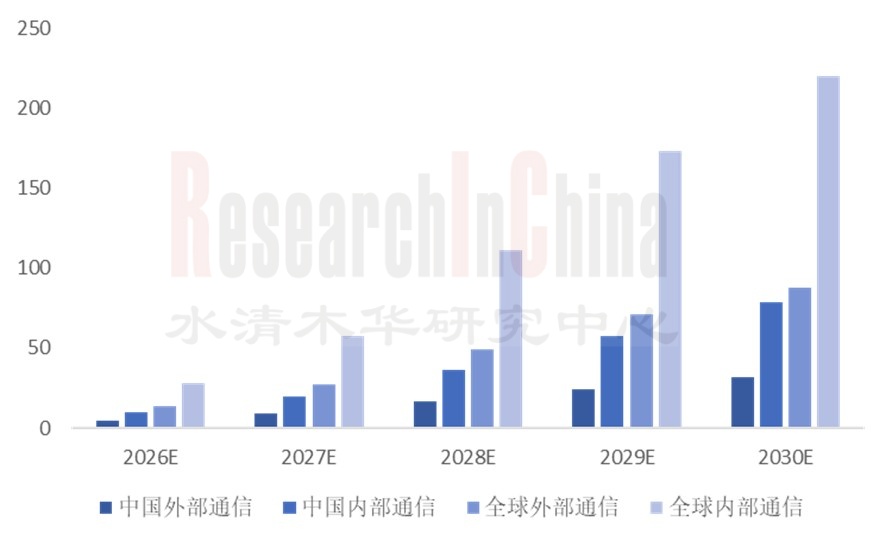
数据来源:《2026年下一代具身智能机器人通信网络拓扑及芯片行业研究报告》
趋势二:内部通信协议EtherCAT方案的渗透率将逐年上升
长期以来,机器人内部通信呈现USB、CAN、RS485等多种协议并存的“碎片化”局面 。然而,随着具身智能体自由度的增加(通常超过40个)以及对运动控制精度要求的提升,传统CAN总线在带宽和实时性上的瓶颈已暴露无遗 。
佐思汽研的研究表明,朝着车载以太网演进的Ethernet,特别是EtherCAT协议,有望成为内部通信一体化的更优解决方案。EtherCAT由德国倍福开发,目前本土企业如创耀科技、先楫半导体等发布获倍福授权量产的机器人专用ESC芯片。
相较于传统以太网的“存储转发”机制,EtherCAT采用独特的“在飞处理(Processing on the fly)”技术 。数据帧像高速列车一样“飞过”各个从站节点,从站无需缓存即可在纳秒级瞬间读取指令并插入反馈数据 。这种机制使得EtherCAT系统在连接数十个关节的情况下,仍能保持微秒级的通信周期和小于1微秒的抖动。
在人形机器人的双足行走与平衡控制中,多关节的微秒级同步至关重要。EtherCAT的分布式时钟(Distributed Clocks)技术可确保所有轴的同步误差小于100纳秒 ,完美契合了高动态运动控制的需求。目前,包括智元机器人、宇树科技、优必选在内的头部厂商已在其旗舰产品中广泛部署EtherCAT或基于以太网的定制总线。
EtherCAT和CAN总线的对比
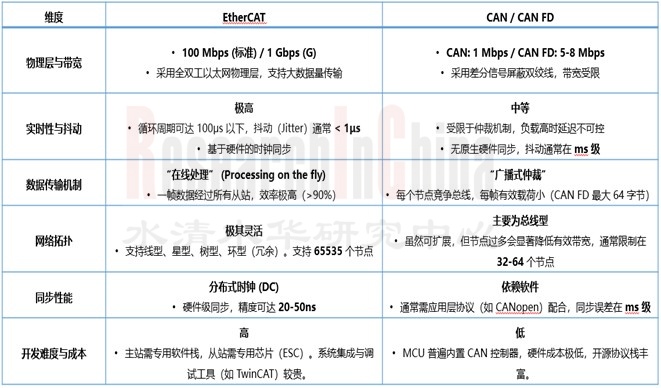
图片来源:《2026年下一代具身智能机器人通信网络拓扑及芯片行业研究报告》
趋势三:网络拓扑架构的重塑,从分布式向区域化集中跃迁
随着传感器数量的激增(如触觉皮肤、多目视觉),传统点对点的布线方式导致机器人内部线束如同“血管”般臃肿,不仅增加了重量,还降低了可靠性。
借鉴智能汽车的E/E架构演进,具身智能机器人正加速向“区域化架构”转型。
以特斯拉Optimus Gen3以及Figure 03为代表的型号,其可能采用了类汽车的区域控制器(Zonal Control Unit, ZCU)设计。传感器和执行器首先接入就近的区域控制器,再通过高速以太网骨干网(Backbone)连接至中央计算单元 。这种设计借鉴汽车行业实测数据,不仅大幅减少了线束长度和重量(预计降低16%-30%),还简化了装配难度。
在这一趋势下,高速串行通信技术(SerDes)和TSN(时间敏感网络)的重要性日益凸显。更有前瞻性的技术如鹏瞰半导体提出的TS-PON全光纤工业光总线,利用光纤抗干扰、低延迟(<10μs)和高带宽(10Gbps以上)的特性,仅需一根光纤即可承揽所有电气总线业务,有望未来在高端机器人场景开展试点应用。
Figure 03 机器人

图片来源:Figure AI
趋势四:末端通信集成化,I3C协议正成为解决灵巧手内部板级互联的关键技术
灵巧手是具身智能机器人最复杂的末端执行器,需要在极小的空间内集成数十个传感器和电机。传统的CAN或UART接口需要独立的收发器和晶振,占用PCB面积大且布线复杂。
I3C(Improved Inter Integrated Circuit)协议正成为解决灵巧手“最后一寸”通信难题的关键技术。
相比传统I2C,I3C支持高达12.5Mbps的传输速率(推挽模式),且支持带内中断(IBI),允许传感器在无需额外中断线的情况下主动上报紧急数据(如触觉突变)。
恩智浦等厂商推出的基于I3C的灵巧手方案显示,仅需两根线即可实现主控与多个手指关节的通信,在主控集成I3C控制器的前提下无需外部PHY芯片,显著节省了BOM成本与布线空间 。这种高集成度、低功耗且支持热插拔的特性,使其成为高密度触觉传感器阵列和微型关节控制的理想选择。
恩智浦基于I3C总线的灵巧手总线拓扑结构
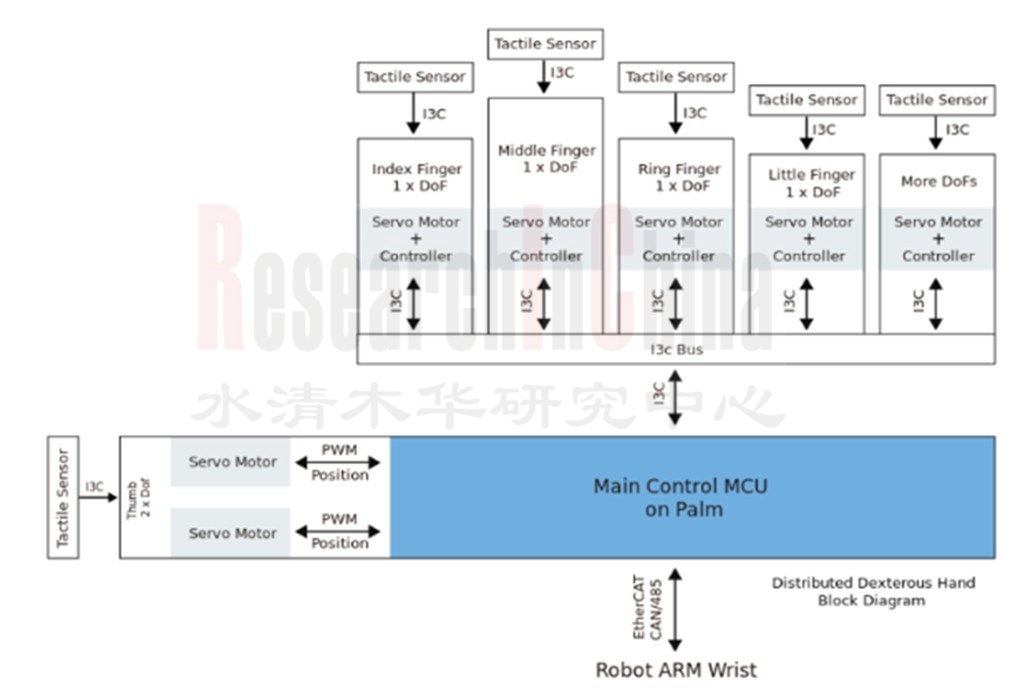
图片来源:NXP
趋势五:软硬一体的“数据总线”,DDS与ROS 2如何构建去中心化神经中枢?
在软件定义机器人的时代,通信不仅仅是比特的传输,更是数据的分发。ROS 2及其底层采用的DDS(数据分发服务)为默认底层通信中间件,构成了机器人的“智能中枢” 。
DDS采用“以数据为中心”的发布-订阅模型,去除了中心化的消息代理,消除了单点故障风险 。更重要的是,DDS提供了极其丰富的QoS(服务质量)策略,如可靠性、持久性、截止期等 。这意味着开发者可以为关节控制指令配置“高可靠、低延迟”策略,而为视频流配置“尽力而为”策略,从而在同一网络中实现异构数据的高效调度 。
宇树科技的G1机器人便是这一趋势的典型代表,其内部通过DDS中间件实现了运动控制、感知与决策模块的解耦与高效协同,甚至兼容了外部PC的算力扩展 。
DDS(数据分发服务)的 “以数据为中心” 发布 - 订阅架构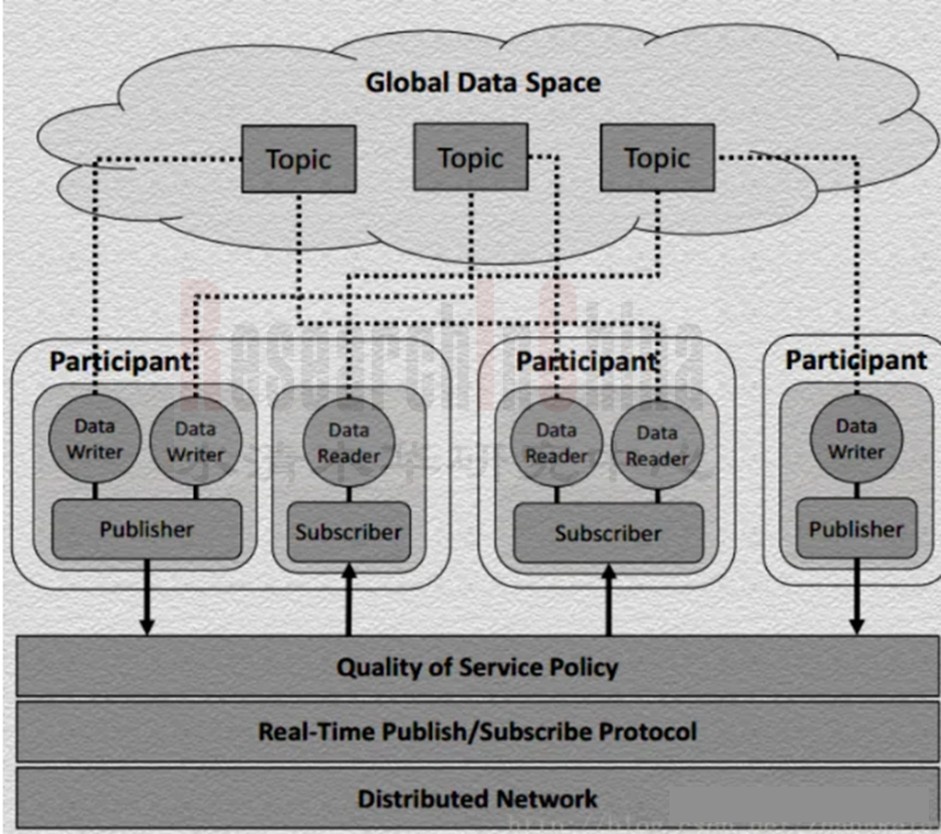
图片来源:网络
趋势六:5G-A与星闪(NearLink)技术协同,支撑机器人云边端高带宽实时交互
具身智能体不仅需要强健的“内神经”,还需要敏捷的“外神经”以实现云边端协同。蜂窝网络(5G-A)与短距通信(Wi-Fi/星闪)将形成长期的互补共存格局,而非简单的替代 。
5G-A(5.5G)凭借10Gbps下行速率和毫秒级时延,以及广域无缝漫游能力,是户外巡检、工业园区等移动场景下机器人接入“云端大脑”的必选项 。乐聚机器人与中国移动合作的“夸父”机器人案例证明,5G-A能够支持多机器人群体的高精度协同与实时超高清视频回传 。
而在短距通信领域,中国自主研发的星闪(NearLink)技术展现出对Wi-Fi和蓝牙的强劲替代潜力。星闪SLB模式具备微秒级空口时延(20μs)和纳秒级同步精度 ,且支持多达4096个节点的并发连接 。这使其不仅能胜任外部通信,在非金属蒙皮的关节连接处,星闪甚至有望尝试无线化替代部分信号线缆,以探索解决机械磨损痛点。目前国内企业中创耀科技已推出针对具身智能机器人的星闪产品。
Wi-Fi 7以及星闪(NearLink)参数对比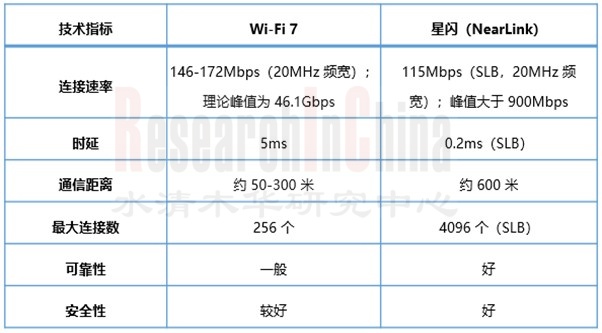
图片来源:《2026年下一代具身智能机器人通信网络拓扑及芯片行业研究报告》
01 具身智能机器人通信网络拓扑架构
1.1 具身智能机器人通信网络概述
具身智能机器人通信网络模块概述
具身智能机器人通信网络概述
具身智能机器人内部通信多模态数据
人形机器人EtherCAT网络拓扑
具身智能机器人对内部通信传输的要求(1)
具身智能机器人对内部通信传输的要求(1)
以太网有望成为通信协议统一标准
1.2 具身智能机器人EtherCAT通信网络拓扑概述
EtherCAT概述
EtherCAT "飞行处理"机制
EtherCAT站点状态机管理机制
EtherCAT时间同步技术
EtherCAT高精度同步机制在具身智能中的应用
EtherCAT运行原理
EtherCAT从站系统的实现方式
EtherCAT 对于具身智能机器人的适配性
EtherCAT和CAN总线的对比
EtherCat通信协议优势及趋势
EtherCat通信协议的缺陷和挑战
EtherCAT下一代技术
1.3 EtherCAT通信网络技术栈
ROS 2通信架构技术栈
ROS 2 的新特性
ROS 2 系统核心组件
ROS 2 的通信架构设计
具身智能机器人基于 ROS2 的通信架构
ROS 2 系统架构进行数据处理流程示例
ROS 2 机器人端点通信方案
ROS 2 在具身智能机器人领域的部分应用
1.4 EtherCAT通信网络中间件
DDS 概述
DDS的核心模型及优势
DDS的QoS策略
1.5 FPGA芯片以及PHY芯片在具身智能机器人通信中的应用
以太网物理层芯片(PHY)概述
以太网物理层芯片(PHY)应用
FPGA在机器人控制通信系统中的核心优势
FPGA 在机器人领域的实际应用案例
FPGA 在特斯拉 Optimus Gen 2 中通信的应用
1.6 具身智能机器人通信芯片产业链及规模
具身智能机器人内部通信单元的底层硬件产业链
具身智能机器人对外通信的产业链结构
具身智能机器人对内通信成本
全球具身智能机器人通信模组市场规模预估 (2026-2030)
中国具身智能机器人通信模组市场规模预估 (2026-2030)
02 具身智能机器人通信各场景应用情况
2.1 传感器通信架构
具身智能机器人所搭载的传感器类型
机器人CMOS图像传感器通信
机器人激光雷达/毫米波雷达通信
具身智能机器人麦克风网络通信
基于EtherCAT机器视觉系统集成技术
基于EtherCAT的机器视觉系统框架
2.2 运动控制及执行器
具身智能机器人运动控制通信网络模块及应用
具身智能机器人通信接口设计
具身智能机器人执行器与 EtherCAT 通信网络的硬件架构解析
EtherCAT在机器人运动控制中优势显著
2.3 灵巧手通信架构
灵巧手通信类型及考量
灵巧手通信架构
灵巧手手掌板 EtherCAT 从站系统
灵巧手分布式通信架构的挑战
I3C和I2C区别及在具身智能领域优势
灵巧手基于I3C总线的分布式通信架构
2.4 对外通信架构
对外通信技术是具身智能机器人的底座
具身智能机器人无线通信和有线通信的对比
外部通信以无线通信为主
蜂窝网在具身智能机器人对外通信的应用
Wi-Fi等局域网在具身智能机器人对外通信的应用
星闪技术简介
星闪在具身智能机器人对外通信的应用
2.5 具身智能机器人通信发展趋势
当前类人机器人运动控制中精度以及延迟的发展要求
TS-PON新一代全光纤工业光总线技术
TS-PON全光网芯片机器人通信架构
内部控制网络从“分布式功能控制”向“区域化集中控制”的范式转移
时间敏感网络(TSN)以太网的应用
TSN在机器人通信中的架构革新
5G-Advanced(5G-A)在具身智能机器人工业场景的应用优势
星闪技术在具身智能机器人领域的优势
DDS 中间件与 ROS 2 的深度优化
新一代高速串行通信技术向机器人迁移
03 主要具身智能机器人本体厂商通信网络部署方案
3.1 宇树科技通信架构
宇树人形机器人G1
宇树科技G1软件系统架构
宇树科技G1双SoC通信架构
主控芯片通信参数
关节控制芯片通信参数
内部网络架构与拓扑
内部总线与执行器通信
传感器通信路径
物理通信接口矩阵 (G1-Edu)
宇树科技G1通信接口概览
GPIO / 串行总线拓展接口
核心技术特点—基于DDS的实时数据分发
宇树四足机器人Go2
宇树Go2主控板模块布局
宇树Go2主控板通信模块概览
宇树Go2无线通信模块概览
宇树Go2无线通信模块构成详解
宇树Go2无线通信模块参数功能拆解
宇树Go2通信接口解析
宇树Go2多协议通信
宇树Go2通信网络核心技术(1)
宇树Go2通信网络核心技术(2)
3.2 智元机器人通信架构
智元灵犀X1通信架构
智元灵犀X1整机接线
智元灵犀X1整机线路详解
核心通信模块DCU
执行层通信架构
关节电机通信参数
3.3 夸父机器人通信架构
5G-A 技术在夸父机器人中的应用
KUAVO 5 MAX 下位机通信配置
KUAVO 5 MAX 上位机参数配置
KUAVO 5 MAX 灵巧手及传感器通信配置
新一代乐聚夸父机器人采用NVIDIA Jetson Thor 通信配置
3.4 优必选机器人通信架构
优必选机器人通信参数(1)
优必选机器人执行器通信网络架构
优必选机器人传感器通信网络架构
优必选机器人群脑网络2.0
优必选外部通信架构
优必选机器人UWB定位技术应用
3.5 云深处科技机器人通信架构
云深处J系列机器人关节通信配置
云深处绝影X20机器人配置参数
云深处绝影Lite3 机器人配置参数
云深处山猫M20外部通信应用
3.6 傅利叶机器人通信架构
傅利叶机器人基本参数
傅利叶机器人N1通信架构
傅利叶人形机器人Fourier N1 部分通信物料清单
傅利叶GR-1机器人电气架构
傅利叶GR-1机器人电气架构拆解
3.7 北京人形机器人创新中心通信架构
天工2.0 通信架构参数
天工2.0 大小脑模组通信能力
天工2.0 灵巧手以及执行器通信架构
天工2.0 传感器以及语音模块通信架构
天轶2.0 通信架构参数
3.8 人形机器人(上海)有限公司通信架构
“青龙”感知与控制系统设计
“青龙”机器人通信架构
“青龙”运动控制计算机通信架构
“青龙”手臂及执行器通信架构
“青龙”通信设备执行层
3.9 其他机器人厂商通信架构
特斯拉 EtherLoop 高速总线技术
特斯拉 Optimus 外部通信配置
小米 CyberOne 通信系统
小米 CyberOne 通信系统架构
逐际动力 LimX Oli 机器人通信参数
逐际动力 LimX Oli 机器人通信接口
04 国内通信芯片和模组厂商研究
4.1 兆易创新
兆易创新机器人芯片产品布局
兆易创新机器人内部通信网络芯片(1)
兆易创新机器人内部通信网络芯片(2)
兆易创新关节控制芯片
基于EtherCAT伺服从站解决方案
兆易创新高性能MCU
空心杯电机方案
4.2 创耀科技
创耀科技通信芯片产品及解决方案
创耀科技具身智能机器人领域合作
创耀科技EtherCat扩展技术布局
创耀科技EtherCAT从站控制芯片
创耀科技星闪芯片系列
4.3 先楫半导体
先楫半导体人形机器人产品布局(1)
先楫半导体人形机器人产品布局(2)
机器人关节专用芯片模组
基于HPM6E8Y关节电机驱动方案
先楫半导体适用机器人手部的MCU
先楫半导体适用机器人关节的MCU
4.4 码灵半导体
码灵半导体EterCAT从站控制器芯片
码灵半导体系列工作模式
码灵半导体系列芯片(1)
码灵半导体系列芯片(2)
4.5 瑞芯微
瑞芯微机器人行业战略布局
瑞芯微 EtherCAT 总线:机器人的实时以太网通信方案
瑞芯微专用的机器人SDK及配套开发板平台
瑞芯微高性能SOC(1)
瑞芯微高性能SOC (2)
EtherCAT 多轴运动控制方案
4.6 裕太微
裕太微机器人PHY芯片布局
裕太微干兆以太网物理层芯片:
裕太微单口2.5G以太网物理层芯片:
4.7 亚信电子
亚信电子工业以太网芯片(1)
亚信电子工业以太网芯片 (2)
机器人手臂解决方案
亚信电子工业以太网芯片(3)
亚信电子自主开发的主站软件协议栈
4.8 国讯芯微
国讯芯微具身智能通信核心技术
国讯芯微参与具身智能通信标准起草
国讯芯微与Intel合作具身智能控制器
国讯芯微具身智能大小脑网络配置
国讯芯微旗舰级具身智能大小脑网络配置
4.9 极海半导体
极海半导体机器人主控+通信模块方案
极海半导体高精度编码器专用MCU
极海半导体总线型低压伺服方案
极海半导体主控芯片
极海半导体电机控制SoC
4.10 国民技术
国民技术具身智能机器人产品布局
国民技术具身智能机器人产品布局通信性能简介
国民技术驱动模组网关芯片
国民技术关节驱动模组芯片
国民技术灵巧手驱动芯片
4.11 其他国内通信芯片和模组厂商研究
移远通信AI模组
移远通信支持边缘计算的开发板以及多模态手持终端
美格智能工业级边缘AI BOX方案
05 国外通信芯片和模组厂商研究
5.1 英飞凌
英飞凌机器人通信芯片模组布局
英飞凌无线通信芯片
英飞凌集成 EtherCAT MCU方案
微控制器方案
英飞凌为人形机器人提供定制微控制器解决方案
5.2 德州仪器
德州仪器携手Apptronik打造类人机器人
德州仪器嵌入式处理器解决方案
TI 单对以太网 (SPE) 技术
TI 单对以太网 (SPE) PHY芯片
TMS系列高性能MCU通信能力
德州仪器MCU通信架构设计
德州仪器MCU通信能力
分散式或分布式架构
德州仪器驱动MCU
德州仪器机器人控制器
5.3 恩智浦
恩智浦适配具身智能机器人的三大核心产品主线及布局
NXP主控MCU通信
NXP灵巧手解决方案
EtherCAT+电机控制方案
NXP 域控制器与CANFD网关产品
NXP 大脑与运动控制产品
恩智浦 I3C 总线拓扑灵巧手方案的优势
5.4 Altera
Altera分拆,深化AI时代FPGA全栈布局
Altera机器人战略规划
Agilex™ FPGA 产品组合
Altera EtherCAT 从站方案(1)
Altera EtherCAT 从站方案(2)
5.5 瑞萨电子
瑞萨电子针对以太网的优势
瑞萨电子机器人控制通信解决方案
瑞萨电子微控制器
瑞萨电子EtherCAT的单芯片解决方案
瑞萨电子机器人专用通信与远程 I/O
瑞萨电子高性能MCU
5.6 意法半导体
意法半导体具身智能机器人布局
意法半导体高性能MCU
意法半导体灵巧手解决方案
意法半导体具有EtherCAT连接的双电机伺服驱动解决方案
意法半导体RS-485收发器
5.7 Microchip
Microchip PolarFire® FPGA系列
Microchip新一代光以太网PHY收发器
Microchip PCIe®解决方案
Microchip 高性能以太网解决方案
5.8 ADI
ADI 人形机器人核心产品
ADI具身智能机器人通信连接解决方案
ADI GMSL和以太网技术
ADI 高集成硬件智能伺服电机驱动控制芯片
ADI连接传感器和执行器的SPE产品
ADI 工业以太网物理层(PHY)
实时以太网多协议交换芯片
5.9 安森美
安森美具身智能机器人布局
安森美面向具身智能机器人的系列产品
安森美Treo 模拟混合信号平台
安森美具身智能机器人 10Base 以太网通信解决方案
安森美具身智能机器人外部通信解决方案
安森美具身智能机器人电机驱动解决方案
安森美具身智能机器人灵巧手解决方案
5.10 其他国外通信芯片和模组厂商研究
赛灵思(Xilinx) Kintex UltraScale
莱迪思嵌入式实时感测和控制方案
莱迪思下一代小型FPGA平台
倍福(Beckhoff) 专用ASIC作为EtherCAT从站控制器