《2026年具身智能机器人大模型(含VLA)研究报告》重点研究分析与梳理总结的内容有:
•具身智能机器人大模型的基本概念、产业生态图谱、多维度分类(应用范围、能力模态、架构)、行业发展驱动因素、关键技术发展方向、商业化模式;
•11家科技巨头在具身智能机器人领域的布局规划、团队建设、核心人才、大模型产品及其应用、具身智能机器人大模型产品详细介绍及其落地情况、具身智能生态链合作伙伴、近期关键动态等,包含阿里集团、NVIDIA英伟达、Google DeepMind、OpenAI、微软Microsoft、华为、腾讯RoboticsX、百度、字节跳动、科大讯飞、商汤科技;
•10家知名机器人企业简介、发展历程与规划、机器人产品及大模型搭载情况、自研大模型详细介绍、大模型生态合作情况、近期关键动态等,包含优必选、宇树科技、智元机器人、乐聚机器人、银河通用、星动纪元、FigureAI、Sanctuary AI、1X Technologies、Neura Robotics;
•11家车企在具身智能机器人领域的布局规划、团队建设、核心人才、机器人产品及大模型搭载情况、大模型产品汇总、具身智能机器人大模型产品详细介绍、具身智能生态链合作伙伴、近期关键动态等,包含特斯拉、丰田、本田、现代、小米、小鹏、广汽、奇瑞、零跑、比亚迪、东风,另外还汇总了全球其他13家车企在在具身智能机器人领域的布局。
具身智能机器人大模型(简称“机器人大模型”)与传统机器人控制算法相比,能够做到端到端或层级决策,无需精确建模,能够在非结构化、开放环境(家庭、户外、杂乱桌面)作业;与通用大模型相比,具身智能机器人大模型更注重多模态信息融合理解(视觉+激光雷达+触觉+文本等),目标是在物理世界完成闭环动作,输出关节角度、速度、抓取力等运动指令。
具身智能机器人大模型与传统机器人控制算法、通用大模型的区别
1.png)
来源:《2026年具身智能机器人大模型(含VLA)研究报告》
近年来,具身智能机器人大模型领域呈现如下发展趋势:
一、具身智能玩家纷纷开始应用世界模型
当前,以视觉-语言-动作(VLA)模型为代表的机器人大模型在“感知-决策-执行”闭环上取得了显著进展,让机器人能够理解指令并生成动作。然而,这类模型在应对物理世界的高度多样性和不确定性时仍面临瓶颈,其本质更像是在“模仿”训练数据中的模式,缺乏对动作后果的预见和物理逻辑的理解。
引入世界模型正是为了突破这一局限。世界模型的核心是让机器人获得“想象未来”的能力。它通过多模态数据训练,构建一个对物理环境的内部动态表征,能够根据当前状态和计划执行的动作,预测未来多步的状态变化。这意味着机器人可以从被动的指令跟随者,转变为能进行“脑内推演”的主动决策者。例如,在执行“倒水”任务时,搭载世界模型的机器人不仅能识别杯子和水壶,还能在动作前预测水流轨迹、杯子倾斜角度以及可能发生的溢出,从而规划出更安全、精准的动作序列。
应用世界模型的驱动力主要来自三个方面:
•解决数据瓶颈:高质量机器人真机数据采集成本极高、规模有限,成为能力跃升的核心制约。世界模型可以作为强大的“数据生成器”和“仿真引擎”,生成海量、可控、高保真的合成训练场景,大幅降低对昂贵真机数据的依赖;
•提升决策与泛化能力:通过预测和推演,世界模型使机器人具备一定的因果推理和物理直觉,能够处理训练中未见过的新场景、新物体,实现“举一反三”;
•实现大小脑协同进化:行业共识认为,未来机器人的智能将是“大脑”(高层认知与规划)与“小脑”(底层运动控制)协同进化的结果。世界模型作为高层“大脑”的关键组成部分,与负责执行的VLA等模型形成互补关系,共同构成完整的智能体系。
负责执行的VLA等模型与世界模型的协同流程
2.png)
来源:《2026年具身智能机器人大模型(含VLA)研究报告》
多家企业已经研发出属于自己的世界模型,例如阿里的WorldVLA、英伟达的WAM、腾讯混元3D世界模型、宇树科技的UnifoLM-WMA-0、智元机器人的GE-1等。其中,宇树科技的UnifoLM-WMA-0于2025年9月前后发布并开源,是一个专为通用机器人学习设计的开源模型,现已经适配旗下人形、四足机器人,拥有决策、仿真两种模式,决策模式可预测未来物理交互(如堆叠稳定性、碰撞风险),修正动作,提升复杂任务鲁棒性,仿真模式可生成高保真合成数据,解决真机训练数据稀缺问题。
宇树科技UnifoLM-WMA-0(世界模型-动作架构)的决策模式
3.png)
来源:网络
宇树科技UnifoLM-WMA-0(世界模型-动作架构)的仿真模式
4.png)
来源:网络
智元机器人的世界模型GE-1于2025年8月发布,是面向机器人操控的视频生成式世界模型,以 “视频生成+策略学习+仿真评估” 闭环架构,实现从“看”到“想”再到“动”的端到端推理。GE-1与智元GO-1系列基座模型协同,GO-1侧重通用任务规划与常识知识支撑,GE-1专注时空预测与动作预演,提升精灵G2在复杂场景下的任务成功率与稳定性。
智元机器人GE-1在2025年10月随工业级交互式具身作业机器人精灵G2正式搭载落地,并宣布斩获龙旗科技数亿元订单,已实现“做三明治”“倒茶”“擦桌面”等任务。
智元机器人世界模型GE-1的架构
5.png)
来源:网络
二、机器人大模型实现跨平台应用
传统机器人开发模式,每款机器人的软件、算法都需要针对其独特的硬件配置(传感器、执行器、形态)进行专门开发和调优,导致研发成本高昂、周期漫长,且能力无法复用。机器人大模型实现跨平台应用可打破这一弊端,通过构建强大的端到端多模态基础模型,为机器人植入可迁移的通用智能,使其能够跨越不同本体(如人形、四足、机械臂)、不同任务和不同环境的限制,实现能力的快速泛化与部署。
2025年开始,英伟达GR00T系列、Google DeepMind的Gemini Robotics、Microsoft的Rho-alpha、华为 CloudRobo、星动纪元ERA 42等机器人大模型都是支持跨机器人平台开发、跨场景应用的机器人大模型。
2025年Q3,英伟达发布GR00T N1.6大模型,定位通用人形机器人VLA大模型,通过统一多模态接口+模块化适配层+仿真-实境协同流水线+分层部署架构,实现 “一次训练、多机适配” 的跨平台应用。支持人形双臂/移动机械臂、仓储AGV、医疗辅助机器人、科研机器人等,面对新物体/新场景也无需大量数据即可执行,可灵活适配工业制造、物流仓储、家庭与商用服务、医疗康养、科研与开发等多种应用场景。
英伟达GR00T N1.6大模型可跨平台适配的机器人
6.png)
来源:《2026年具身智能机器人大模型(含VLA)研究报告》
星动纪元端到端VLA具身大模型ERA‑42,2024年12月发布,开始适配于旗下灵巧手星动XHAND1,2025年中先后跨平台应用于轮式服务机器人星动Q5、双足人形机器人星动L7,无需预编程即可快速适配新任务。
星动纪元大模型ERA‑42适配的机器人
7.png)
来源:星动纪元
三、越来越多机器人大模型开源
大模型开源并非简单的技术共享,开源模式汇集全球开发者智慧,能快速攻克物理世界中的复杂“长尾问题”。同时,开源打破了传统闭源商业模式,让中小企业能基于开源模型快速开发,将资源聚焦于硬件创新和场景落地,形成了“巨头搭台、百家唱戏”的产业格局。
开源的核心是降低研发门槛、加速技术迭代、构建生态壁垒、推动规模化落地,并形成 “开源—生态—数据—更强模型” 的正向飞轮。
开源具身智能机器人大模型汇总(截止2026-3)

来源:《2026年具身智能机器人大模型(含VLA)研究报告》
小米面向具身智能机器人的VLA大模型Xiaomi-Robotics-0,2026年2月12日正式开源,采用Apache License 2.0(允许商用、修改、分发,无 “传染性”)开源协议,全栈无保留,开源完整代码、预训练权重、技术文档、论文、部署方案等。Xiaomi-Robotics-0复用小米自动驾驶感知/决策技术,实现机器人与汽车技术互通,采用了MoE(混合专家)架构,将“大脑”(视觉语言理解)和“小脑”(动作执行)分离,这种设计改善了传统VLA模型可能存在的推理延迟问题,使其更适用于需要实时响应的消费级机器人产品。
小米VLA大模型Xiaomi-Robotics-0架构
9.png)
来源:小米
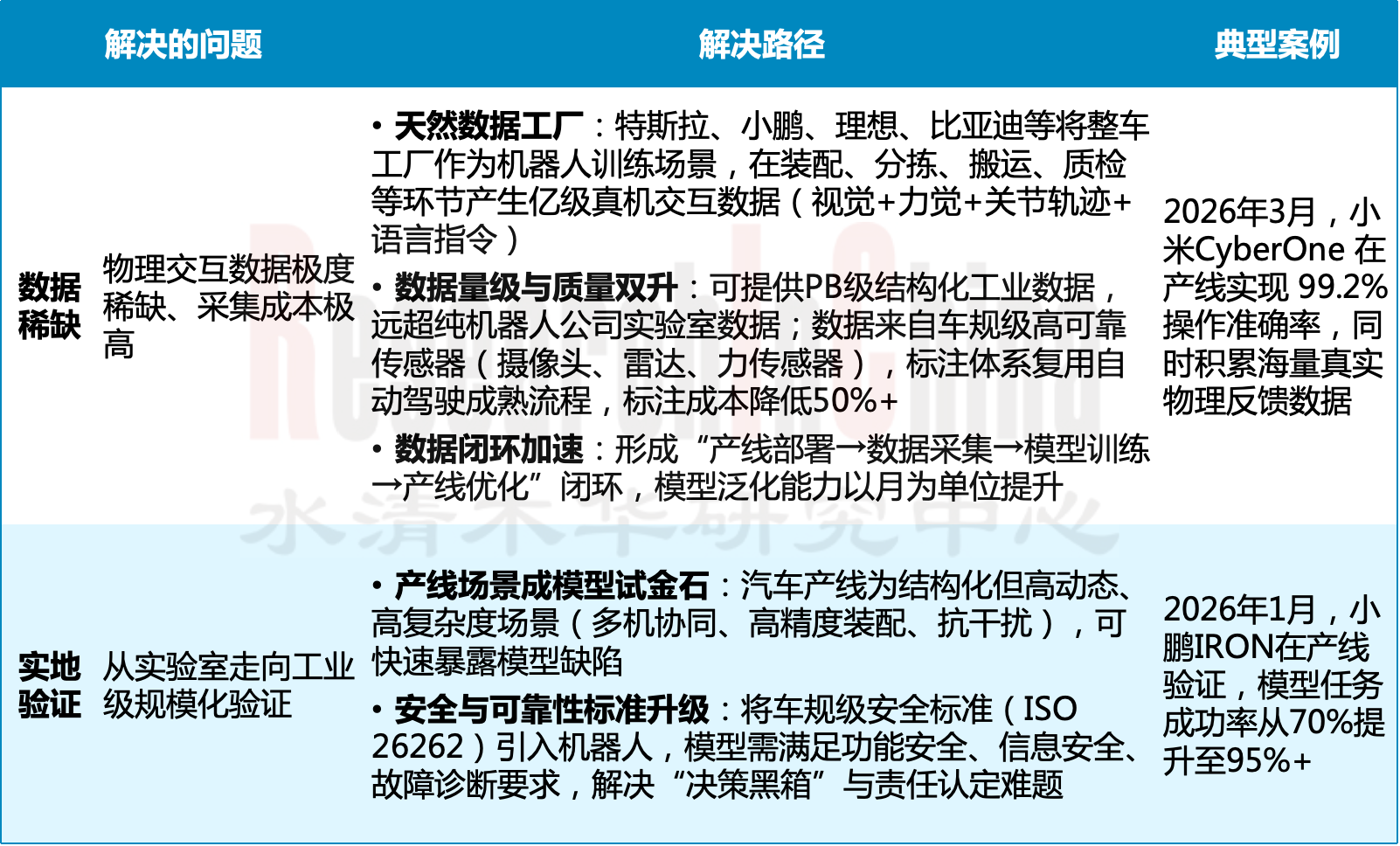
四、车企入局解决具身智能机器人大模型真实数据稀缺难题,并提供实地验证场景
车企大规模入局具身智能与人形机器人赛道,对具身智能大模型(VLA、世界模型等)带来海量工业场景数据、车规级传感器数据和成熟的自动驾驶技术栈,可直接将BEV感知、多模态融合、端到端决策等算法迁移至机器人,训练并提升模型的环境理解、任务规划与运动控制能力。车企工厂产线场景可验证机器人大模型的可靠性、成功率,同时暴露模型缺陷,为日后修正大模型提供高可靠的真机交互数据,有效缓解仿真与现实差距大痛点。
车企可解决机器人大模型真实数据稀缺、实地验证难题
来源:《2026年具身智能机器人大模型(含VLA)研究报告》
另外,车企将车规级安全标准与硬件协同设计引入机器人,让大模型在推理延迟、可靠性和落地效率上大幅优化;汽车与机器人核心供应链(电池、电机、传感器、域控制器等)重合度较高,部分机构测算重合度超50%,规模效应大大降低核心硬件成本,模型部署成本同步下降。
例如,广汽集团为解决数据难题,借用了自动驾驶数据采集的经验,将机器人派到真实场景中采集真实数据,并同时进行核心功能的深度适配与实地验证,形成“用中学、学中用”的闭环数据增长模式。在降本策略上,其机器人优先复用车端零部件(如芯片、激光雷达等),并实现关键部件100%国产化。广汽已明确第四代产品GoMate Mini计划在2027年规模化量产,将安防场景作为其机器人首个商业化落地领域。
11.png)
来源:广汽集团
01 具身智能机器人大模型概述与关键技术发展方向
1.1 具身智能机器人大模型核心定义
1.1.1 具身智能定义与演进:正在从弱交互走向强自主
1.1.2 具身智能机器人定义:通过人工智能自主理解环境、完成任务
1.1.3 具身智能机器人大模型定义
1.2 具身智能机器人大模型全球产业生态图谱
1.3 具身智能机器人大模型分类体系
1.3.1 具身智能机器人大模型分类:按应用范围
1.3.2 具身智能机器人大模型分类:按能力模态
1.3.3 具身智能机器人大模型分类:按架构形态
1.4 具身智能机器人大模型行业发展驱动因素
1.4.1 具身智能机器人大模型行业发展驱动因素总览
1.4.2 具身智能机器人大模型行业发展驱动因素:政策是核心引擎
1.4.3 具身智能机器人大模型行业发展驱动因素:技术
1.4.4 具身智能机器人大模型行业发展驱动因素:市场需求
1.4.5 具身智能机器人大模型行业发展驱动因素:资本加注
1.4.6 具身智能机器人大模型行业发展驱动因素:产业协同
1.4.7 具身智能机器人大模型行业发展驱动因素:数据闭环促进模型迭代
1.4.8 具身智能机器人大模型行业发展驱动因素:跨学科人才聚集
1.5 具身智能机器人大模型关键技术发展方向
1.5.1 具身智能机器人大模型关键技术发展方向总览
1.5.2 具身智能机器人大模型关键技术发展方向:多模态感知与统一表征
1.5.3 具身智能机器人大模型关键技术发展方向:世界模型
1.5.4 具身智能机器人大模型关键技术发展方向:VLA端到端架构
1.5.5 具身智能机器人大模型关键技术发展方向:分层快慢系统
1.5.6 具身智能机器人大模型关键技术发展方向:提升泛化能力与数据效率
1.5.7 具身智能机器人大模型关键技术发展方向:安全与可靠性
1.5.8 具身智能机器人大模型关键技术发展方向:轻量化与边缘部署
1.6 具身智能机器人大模型商业化模式
1.6.1 具身智能机器人大模型商业化模式:模型技术输出
1.6.2 具身智能机器人大模型商业化模式:软硬一体化销售
1.6.3 具身智能机器人大模型商业化模式:场景化服务运营
1.6.4 具身智能机器人大模型商业化模式:数据与工具生态服务
1.6.5 具身智能机器人大模型商业化落地关键策略与演进方向
02 全球主流玩家与产品详细介绍:科技巨头阵营
2.1 科技巨头阵营典型具身智能大模型产品汇总(1)
2.1 科技巨头阵营典型具身智能大模型产品汇总(2)
2.1 科技巨头阵营典型具身智能大模型产品汇总(3)
2.2 阿里集团
2.2.1 阿里集团具身智能机器人产业布局与规划
2.2.2 阿里集团大模型研发与工程化团队:通义实验室
2.2.3 阿里集团成立”机器人与具身智能事业部”:事业部详细介绍
2.2.4 阿里集团成立”机器人与具身智能事业部”:2026–2028业务规划
2.2.5 阿里集团具身智能机器人大模型核心团队成员及履历
2.2.6 阿里集团大模型产品体系
2.2.7 阿里集团具身智能机器人大模型:发展历程大事记
2.2.8 阿里集团具身智能机器人大模型:产品汇总
2.2.9 阿里集团具身智能机器人大模型:全球首个带时空记忆的具身智能大脑基础模型RynnBrain系列
2.2.10 阿里集团具身智能机器人大模型:旗舰通用具身模型RynnBrain 30B A3B
2.2.11 阿里集团具身智能机器人大模型:RynnVLA 001
2.2.12 阿里集团具身智能机器人大模型:视频多模态具身认知模型RynnEC
2.2.13 阿里集团具身智能机器人大模型:全自回归具身智能大模型World VLA
2.2.14 阿里集团具身智能机器人大模型:落地机器人汇总
2.2.15 阿里集团具身智能机器人大模型:生态链合作伙伴
2.3 NVIDIA英伟达
2.3.1 NVIDIA公司简介
2.3.2 NVIDIA具身智能机器人产业布局历程
2.3.3 NVIDIA具身智能机器人具身智能机器人核心团队
2.3.4 NVIDIA具身智能机器人相关产品汇总
2.3.5 NVIDIA具身智能机器人大模型:发展历程
2.3.6 NVIDIA具身智能机器人大模型:产品汇总
2.3.7 NVIDIA具身智能机器人大模型:VLA大模型Isaac GR00T
2.3.8 NVIDIA具身智能机器人大模型:世界动作模型Dream Zero
2.3.9 NVIDIA具身智能机器人大模型:落地情况
2.3.10 NVIDIA具身智能机器人大模型:生态链合作伙伴
2.3.11 NVIDIA具身智能机器人大模型:关键动态
2.4 Google DeepMind
2.4.1 Google具身智能机器人核心团队:Google DeepMind
2.4.2 Google DeepMind简介
2.4.3 Google DeepMind发展历程
2.4.4 Google DeepMind核心研究方向:10大领域
2.4.5 Google DeepMind核心团队成员及其履历
2.4.6 Google DeepMind大模型汇总
2.4.7 Google DeepMind主力大模型:Gemini
2.4.8 Google DeepMind具身智能机器人大模型:Gemini Robotics
2.5 OpenAI
2.5.1 OpenAI公司简介
2.5.2 OpenAI融资历程:三年间估值增长超25倍
2.5.3 OpenAI发展历程
2.5.4 OpenAI组织架构
2.5.5 OpenAI产品矩阵
2.5.6 OpenAI具身智能机器人产业布局与规划
2.5.7 OpenAI人形机器人实验室核心团队成员及履历
2.5.8 OpenAI具身智能机器人大模型:产品汇总
2.5.9 OpenAI具身智能机器人大模型:GPT-5具身适配版
2.5.10 OpenAI具身智能机器人大模型:VLA基础模型
2.5.11 OpenAI具身智能机器人大模型:生态链合作伙伴
2.6 Microsoft微软
2.6.1 Microsoft具身智能机器人产业布局历程与规划
2.6.2 Microsoft具身智能机器人相关团队设置
2.6.3 Microsoft具身AI团队核心成员及其履历
2.6.4 Microsoft自研大模型产品汇总
2.6.5 Microsoft具身智能机器人大模型:研发历程
2.6.6 Microsoft具身智能机器人大模型:VLA+模型Rho-alpha
2.6.7 Microsoft具身智能机器人大模型:生态链合作伙伴
2.6.8 Microsoft具身智能机器人大模型:近期关键新闻动态
2.7 华为
2.7.1 华为具身智能机器人产业布局与规划
2.7.2 华为具身智能机器人核心团队与平台全景表
2.7.3 华为具身智能专项组核心团队成员及履历
2.7.4 华为盘古大模型产品总览
2.7.5 华为盘古大模型能力:多模态技术
2.7.6 华为盘古大模型能力:思维推理技术
2.7.7 华为盘古大模型AI云服务
2.7.8 华为具身智能机器人大模型:Cloud Robo具身智能大模型
2.7.9 华为具身智能机器人大模型:生态链合作伙伴
2.8 腾讯RoboticsX
2.8.1 腾讯RoboticsX简介(1)
2.8.1 腾讯RoboticsX简介(2)
2.8.2 腾讯RoboticsX发展历程
2.8.3 腾讯RoboticsX具身智能机器人大模型:产品汇总
2.8.4 腾讯RoboticsX具身智能机器人大模型:Tairos-Perception
2.8.5 腾讯RoboticsX具身智能机器人大模型:Tairos-Planner
2.8.6 腾讯RoboticsX具身智能机器人大模型:Tairos-Action
2.8.7 腾讯RoboticsX具身智能机器人大模型:生态链合作伙伴
2.8.8 腾讯RoboticsX具身智能机器人大模型:关键动态
2.9 百度
2.9.1 百度具身智能机器人产业布局历程与规划
2.9.2 百度具身智能机器人相关团队介绍
2.9.3 百度大模型产品汇总
2.9.4 百度具身智能机器人大模型:文心具身控制模型
2.9.5 百度具身智能机器人大模型:生态链合作伙伴
2.9.6 百度具身智能机器人大模型:关键动态
2.10 字节跳动
2.10.1 字节跳动具身智能机器人产业布局历程与规划
2.10.2 字节跳动具身智能机器人相关团队介绍
2.10.3 字节跳动具身智能机器人SeedRobotics核心团队成员及其履历
2.10.4 字节跳动大模型产品汇总
2.10.5 字节跳动具身智能机器人大模型:产品汇总
2.10.6 字节跳动具身智能机器人大模型:机器人小脑GR系列
2.10.7 字节跳动具身智能机器人大模型:机器人大脑Robix
2.10.8 字节跳动具身智能机器人大模型:多模态长期记忆M3-Agent
2.10.9 字节跳动具身智能机器人大模型:生态链合作伙伴
2.11 科大讯飞
2.11.1 科大讯飞具身智能机器人产业布局与规划
2.11.2 科大讯飞具身智能机器人相关团队/企业
2.11.3 科大讯飞大模型产品汇总
2.11.4 科大讯飞具身智能机器人大模型:产品汇总
2.11.5 科大讯飞具身智能机器人大模型:iFlyBot-VLM
2.11.6 科大讯飞具身智能机器人大模型:iFlyBot-VLA
2.11.7 科大讯飞具身智能机器人大模型:生态链合作伙伴
2.11.8 科大讯飞具身智能机器人大模型:关键动态
2.12 商汤科技
2.12.1 商汤科技具身智能机器人产业布局与规划
2.12.2 商汤科技具身智能机器人相关团队/企业
2.12.3 商汤科技大模型产品汇总
2.12.4 商汤科技具身智能机器人大模型:产品汇总
2.12.5 商汤科技具身智能机器人大模型:悟能具身智能平台
2.12.6 商汤科技具身智能机器人大模型:具身超级大脑A1
2.12.7 商汤科技具身智能机器人大模型:生态链合作伙伴
2.12.8 商汤科技具身智能机器人大模型:关键动态
03 全球主流玩家与产品详细介绍:机器人企业阵营
3.1 机器人企业阵营典型具身智能大模型产品汇总(1)
3.1 机器人企业阵营典型具身智能大模型产品汇总(2)
3.1 机器人企业阵营典型具身智能大模型产品汇总(3)
3.2 优必选(UBTECH)
3.2.1 优必选公司简介
3.2.2 优必选营收情况
3.2.3 优必选机器人产品总览
3.2.4 优必选核心技术体系
3.2.5 优必选发展战略与规划
3.2.6 优必选具身智能机器人大模型:群脑网络BrainNet架构
3.2.7 优必选具身智能机器人大模型布局
3.2.8 优必选具身智能机器人大模型:三大模型核心信息
3.2.9 优必选具身智能机器人大模型:Thinker多模态大模型发展历程
3.2.10 优必选具身智能机器人大模型:人形机器人多模态大模型Thinker
3.2.11 优必选具身智能机器人大模型:人形机器人大模型搭载详情
3.2.12 优必选具身智能机器人大模型:生态链合作伙伴
3.3 宇树科技Unitree Robotics
3.3.1 宇树科技公司简介
3.3.2 宇树科技市场与产品战略规划
3.3.3 宇树科技具身智能机器人大模型:发展历程
3.3.4 宇树科技具身智能机器人大模型:自研UnifoLM系列
3.3.5 宇树科技具身智能机器人大模型:UnifoLM-WMA-0
3.3.6 宇树科技具身智能机器人大模型:UnifoLM-VLA-0
3.3.7 宇树科技具身智能机器人大模型:生态链合作伙伴
3.3.8 宇树科技具身智能机器人大模型:机器人搭载适配大模型明细
3.4 智元机器人
3.4.1 智元机器人公司简介
3.4.2 智元机器人产品概览
3.4.3 智元机器人具身智能机器人大模型:自研五大模型
3.4.4 智元机器人具身智能机器人大模型:GO-1
3.4.5 智元机器人具身智能机器人大模型:硅光动语大模型
3.4.6 智元机器人具身智能机器人大模型:WorkGPT
3.4.7 智元机器人具身智能机器人大模型:ActionGPT动作大模型
3.4.8 智元机器人具身智能机器人大模型:GE-1世界模型
3.4.9 智元机器人具身智能机器人大模型:生态链合作伙伴
3.4.10 智元机器人具身智能机器人大模型:人形机器人大模型搭载详情
3.4.11 智元机器人“A计划”
3.5 乐聚机器人
3.5.1 乐聚机器人公司简介
3.5.2 乐聚机器人发展历程
3.5.3 乐聚机器人产品概览
3.5.4 乐聚机器人发展战略与规划
3.5.5 乐聚机器人具身智能机器人大模型:发展历程
3.5.6 乐聚机器人具身智能机器人大模型:具身智能模块(乐聚自研多模态)、教育大模型
3.5.7 乐聚机器人具身智能机器人大模型:生态链合作伙伴
3.5.8 乐聚机器人具身智能机器人大模型:人形机器人大模型搭载详情
3.5.9 乐聚机器人最新动态
3.6 银河通用
3.6.1 银河通用公司简介
3.6.2 银河通用团队核心成员
3.6.3 银河通用产品总览
3.6.4 银河通用战略规划
3.6.5 银河通用具身智能机器人大模型:自研大模型汇总
3.6.6 银河通用具身智能机器人大模型:GraspVLA抓取基座大模型
3.6.7 银河通用具身智能机器人大模型:导航大模型
3.6.8 银河通用具身智能机器人大模型:GroceryVLA零售场景大模型
3.6.9 银河通用具身智能机器人大模型:生态链合作伙伴
3.7 星动纪元
3.7.1 星动纪元公司简介
3.7.2 星动纪元机器人产品总览
3.7.3 星动纪元具身智能机器人大模型探索四阶段
3.7.4 星动纪元具身智能机器人大模型:ERA 42
3.7.5 星动纪元具身智能机器人大模型:Ctrl World可控生成世界模型
3.7.6 星动纪元具身智能机器人大模型:同步加入两大顶级产学研联盟
3.7.7 星动纪元具身智能机器人大模型:与清华联合开源AIGC机器人大模型
3.7.8 星动纪元具身智能机器人大模型:生态链合作伙伴
3.8 FigureAI
3.8.1 FigureAI公司简介
3.8.2 FigureAI具身智能机器人大模型:发展大事记
3.8.3 FigureAI具身智能机器人大模型:端到端VLA通用具身智能模型Helix
3.8.4 FigureAI具身智能机器人大模型:历代人形机器人搭载大模型详情
3.8.5 FigureAI具身智能机器人大模型:产业链合作伙伴
3.9 Sanctuary AI
3.9.1 Sanctuary AI公司简介
3.9.2 Sanctuary AI核心团队成员及其履历
3.9.3 Sanctuary AI具身智能机器人大模型:发展历程
3.9.4 Sanctuary AI具身智能机器人大模型:人形机器人搭载大模型详情
3.9.5 Sanctuary AI具身智能机器人大模型:自研大模型汇总
3.9.6 Sanctuary AI具身智能机器人大模型:Carbon™v3
3.9.7 Sanctuary AI具身智能机器人大模型:大型行为模型LBM
3.9.8 Sanctuary AI具身智能机器人大模型:产业链合作伙伴
3.10 1X Technologies
3.10.1 1X Technologies公司简介
3.10.2 1X Technologies发展历程
3.10.3 1X Technologies团队核心成员及背景介绍
3.10.4 1X Technologies具身智能机器人大模型:研发落地历程
3.10.5 1X Technologies具身智能机器人大模型:自研大模型及落地情况汇总
3.10.6 1X Technologies具身智能机器人大模型:Redwood AI
3.10.7 1X Technologies具身智能机器人大模型:1X World Model
3.10.8 1X Technologies具身智能机器人大模型:生态链合作伙伴
3.11 Neura Robotics
3.11.1 Neura Robotics公司简介
3.11.2 Neura Robotics具身智能机器人大模型:发展历程
3.11.3 Neura Robotics具身智能机器人大模型:自研模型体系汇总
3.11.4 Neura Robotics具身智能机器人大模型:NEFM
3.11.5 Neura Robotics具身智能机器人大模型:生态链合作伙伴
3.11.6 Neura Robotics最新动态:中国总部落地杭州萧山
04 全球主流玩家与产品详细介绍:车企跨界阵营
4.1 车企典型具身智能大模型产品汇总(1)
4.1 车企典型具身智能大模型产品汇总(2)
4.1 车企典型具身智能大模型产品汇总(3)
4.1 车企典型具身智能大模型产品汇总(4)
4.2 特斯拉
4.2.1 特斯拉具身智能机器人产业布局历程与规划
4.2.2 特斯拉在具身智能领域的战略定位
4.2.3 特斯拉具身智能机器人相关团队设置
4.2.4 特斯拉Optimus机器人团队核心成员及其履历
4.2.5 特斯拉具身智能机器人产品及大模型部署情况
4.2.6 特斯拉具身智能机器人大模型:大模型产品汇总
4.2.7 特斯拉具身智能机器人大模型:FSD端到端具身控制模型
4.2.8 特斯拉具身智能机器人大模型:Grok4具身交互大模型
4.2.9 特斯拉Optimus人形机器人大脑使用超级计算机系统Dojo
4.2.10 特斯拉将FSD软件算法复用至机器人
4.2.11 特斯拉AI人形机器人软件算法-感知算法
4.2.12 特斯拉AI人形机器人软件算法-运动规划
4.2.13 特斯拉具身智能机器人大模型:生态链合作伙伴
4.2.14 特斯拉具身智能机器人大模型:关键动态
4.3 丰田
4.3.1 丰田具身智能机器人产业布局历程与规划
4.3.2 丰田具身智能机器人相关团队/公司
4.3.3 丰田研究院核心成员及其履历
4.3.4 丰田具身智能机器人产品及大模型部署情况
4.3.5 丰田具身智能机器人大模型:大模型汇总
4.3.6 丰田具身智能机器人大模型:LBM大模型
4.3.7 丰田具身智能机器人大模型:生态链合作伙伴
4.3.8 丰田具身智能机器人大模型:关键动态
4.4 本田汽车
4.4.1 本田汽车具身智能机器人产业布局历程与规划
4.4.2 本田汽车具身智能机器人相关团队/公司
4.4.3 本田汽车具身智能机器人产品及大模型部署情况
4.4.4 本田汽车发布面向具身机器人的2026年度核心技术路线图
4.4.5 本田汽车具身智能机器人大模型总览
4.4.6 本田汽车具身智能机器人大模型:关键动态
4.5 现代汽车
4.5.1 现代汽车具身智能机器人产业布局历程与规划
4.5.2 现代汽车AIRobotics战略:Partnering Human Progress
4.5.3 现代汽车具身智能机器人相关团队/公司
4.5.4 现代汽车控股Boston Dynamics
4.5.5 现代汽车-Boston Dynamics(波士顿动力)公司简介
4.5.6 现代汽车-Boston Dynamics:核心团队成员及履历
4.5.7 现代汽车具身智能机器人产品及大模型部署情况
4.5.8 现代汽车具身智能机器人大模型:大模型总览
4.5.9 现代汽车具身智能机器人大模型:生态链合作伙伴
4.5.10 现代汽车具身智能机器人大模型:关键动态
4.6 小米
4.6.1 小米具身智能机器人产业布局历程与规划
4.6.2 小米具身智能机器人相关团队/公司
4.6.3 小米系在具身智能机器人领域投资生态全景
4.6.4 小米具身智能机器人产品及大模型部署情况
4.6.5 小米具身智能机器人大模型:大模型总览
4.6.6 小米具身智能机器人大模型:Xiaomi-Robotics-0
4.6.7 小米具身智能机器人:自研软件算法
4.6.8 小米汽车技术在具身智能机器人上赋能
4.6.9 小米具身智能机器人大模型:生态链合作伙伴
4.6.10 小米具身智能机器人大模型:关键动态
4.7 小鹏汽车
4.7.1 小鹏汽车具身智能机器人产业布局历程与规划
4.7.2 小鹏汽车具身智能机器人相关团队/公司
4.7.3 小鹏汽车具身智能机器人核心人才及其履历
4.7.4 小鹏汽车具身智能机器人产品迭代历程与大模型部署情况
4.7.5 小鹏汽车具身智能机器人大模型:模型汇总
4.7.6 小鹏汽车具身智能机器人大模型:机器人专属决策大模型VLT
4.7.7 小鹏汽车具身智能机器人大模型:第二代VLA物理世界大模型
4.7.8 小鹏汽车具身智能机器人大模型:多模态交互大模型VLM
4.7.9 小鹏汽车人形机器人复用汽车算法技术
4.7.10 小鹏汽车具身智能机器人大模型:生态链合作伙伴
4.7.11 小鹏汽车具身智能机器人大模型:关键动态
4.8 广汽集团
4.8.1 广汽集团具身智能机器人产业布局历程与规划
4.8.2 广汽集团具身智能机器人相关团队/公司
4.8.3 广汽集团成立慧仑科技,负责机器人核心研发、生产、销售
4.8.4 广汽集团-慧仑科技核心成员及其履历
4.8.5 广汽集团具身智能机器人产品及大模型部署情况
4.8.6 广汽集团具身智能机器人大模型:大模型汇总
4.8.7 广汽集团具身智能机器人大模型:GoMate通用多模态大模型
4.8.8 广汽集团具身智能机器人大模型:具身智能运动控制小模型
4.8.9 广汽集团具身智能机器人大模型:GoMate Mini安防垂类大模型
4.8.10 广汽集团自动驾驶技术在人形机器人上的应用
4.8.11 广汽集团具身智能机器人大模型:生态链合作伙伴
4.8.12 广汽集团具身智能机器人大模型:关键动态汇总
4.9 奇瑞汽车
4.9.1 奇瑞汽车具身智能机器人产业布局历程与规划
4.9.2 奇瑞汽车具身智能机器人相关团队/公司
4.9.3 奇瑞汽车具身智能机器人产品及大模型部署情况
4.9.4 奇瑞汽车具身智能机器人大模型:大模型总览
4.9.5 奇瑞汽车具身智能机器人大模型:生态链合作伙伴
4.10 零跑汽车
4.10.1 零跑具身智能机器人产业布局历程与规划
4.10.2 零跑具身智能机器人相关团队/公司
4.10.3 零跑具身智能机器人团队核心成员及其履历
4.10.4 零跑具身智能机器人产品及大模型部署情况
4.10.5 零跑具身智能机器人大模型:大模型汇总与规划
4.10.6 零跑具身智能机器人大模型:生态链合作伙伴
4.10.7 零跑具身智能机器人大模型:关键动态
4.11 比亚迪
4.11.1 比亚迪具身智能机器人产业布局历程与规划
4.11.2 比亚迪具身智能机器人相关团队/公司
4.11.3 比亚迪具身智能机器人核心人才及其履历
4.11.4 比亚迪具身智能机器人领域投资生态
4.11.5 比亚迪具身智能机器人产品及大模型部署情况
4.11.6 比亚迪具身智能机器人大模型汇总
4.11.7 比亚迪具身智能机器人大模型:关键动态
4.12 东风汽车
4.12.1 东风汽车具身智能机器人产业布局历程与规划
4.12.2 东风汽车具身智能机器人相关团队/公司
4.12.3 东风汽车具身智能机器人产品及大模型部署情况
4.12.4 东风汽车具身智能机器人大模型:太极大模型
4.12.5 东风汽车具身智能机器人大模型:生态链合作伙伴
4.12.6 东风汽车具身智能机器人大模型:关键动态
4.13 全球其他主流车企在具身智能机器人领域的布局汇总(1)
4.13 全球其他主流车企在具身智能机器人领域的布局汇总(2)
4.13 全球其他主流车企在具身智能机器人领域的布局汇总(3)
4.13 全球其他主流车企在具身智能机器人领域的布局汇总(4)