佐思汽研和水清木华研究中心联合发布《2026年具身智能机器人数据产业布局研究报告》。
在具身智能的演进历程中,高质量数据已被产业界和学术界公认为跨越通用精细操作鸿沟的核心要素,随着硬件本体的逐步成熟,算法迭代的瓶颈在2026年将全面转移至数据端。如何低成本、规模化地获取具备物理真实性的多模态数据,成为了未来五年决定具身智能商业化落地的胜负手。
基于此,水清木华研究中心和佐思汽研发布《2026年具身智能机器人数据产业布局研究报告》,报告重点研究分析与梳理了国内24家具身智能数据企业在该领域的技术演进与商业布局,并系统性拆解当前具身智能数据赛道的核心趋势、竞争格局与商业模式演进路径。
中国增速领跑全球,稳居具身数据最大单一市场
历经实验室探索与商业化前夜的蛰伏,具身智能数据赛道在2025年正式迎来规模化落地的商业元年。全球市场总规模在2025年实现强势突破达到2.42亿美元,同比增长181.4%。2025-2030 年全球市场复合年增长率(CAGR)达 85.0%,2030年总规模将攀升至 52.5 亿美元。
从宏观发展曲线来看,整个市场呈现出显著的指数级增长特征。这种爆发并非单一因素驱动,而是本体厂商、科研机构以及第三方数据供应商在底层基础设施上形成共振的结果。进入商业化元年后,行业核心需求迅速从早期的遥操作实验室搭建,向着标准化的海量训练数据采购演变。
在全球具身数据产业的版图中,中国市场的增长势头极为强劲。2025年,中国具身智能数据总规模达到5.0亿元人民币,同比增速高达203%,这一增长率超出了全球同期平均水平接近20个百分点。得益于国内庞大的制造业基本盘与丰富的商业落地场景,中国市场在全球市场中的占比稳定维持在约40%的高位。
从市场结构剖析,中国市场目前正处于数据采集硬件的快速铺设期。现阶段,国内市场的大量预算集中流向了动捕服、力反馈手套、无本体采集支架等数采硬件设备。数采设备与机器人在整体市场份额中占据绝对主导地位,纯数据服务(DaaS)虽在快速萌芽,但目前多以定制化小批量标注与采集订单为主,尚未形成占据统治地位的标准化交付体系。
尽管当前硬件销售依然是核心的变现手段,但产业链的价值创造逻辑正发生根本性重构。随着数据积累的规模效应显现,单条数据的边际成本将急剧下降,行业的护城河将从“硬件制造”向“数据资产运营”全面跃迁。
各大头部企业正加紧构建专属的数据工厂与联合实训场,试图在未来的价值链再分配中抢占数据定价权,一场围绕“高价值高质量数据集”的圈地运动已全面打响。
全球具身智能数据市场规模 (2023-2030,百万美元)
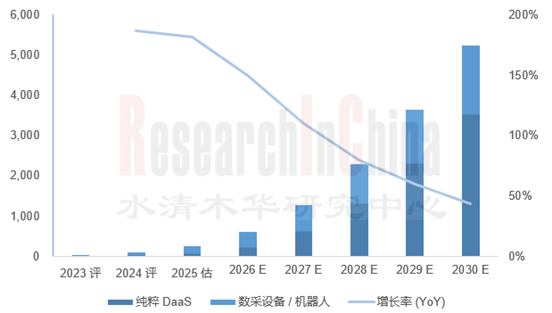
数据来源:《2026年具身智能机器人数据产业布局研究报告》
中国具身智能数据市场规模 (2023-2030,百万元)
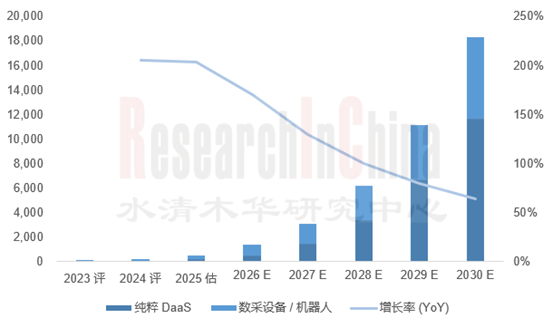
数据来源:《2026年具身智能机器人数据产业布局研究报告》
榜单十强梯队分明,国家队、本体厂与第三方独角兽分庭抗礼
通过对数据规模产能、技术底座、数据集影响力、仿真能力及商业化落地等六大维度的量化评估,国内具身智能数据赛道的Top 10梯队已呈现出清晰的阵营划分。

位列前三的是光轮智能、国家地方共建人形机器人创新中心以及智元机器人,分别代表了独立数据提供商、国家级公共平台与全栈本体厂商三种截然不同的突围路径。国家队依托政策与场景资源优势强势统筹标准,而独角兽企业则凭借极致的技术垂直度在特定数据模态上建立高壁垒。
光轮智能作为该领域的独角兽,其核心竞争力在于极强的数据生成效率与零边际成本的规模化能力。该公司掌握全栈自研的物理仿真引擎,其2025年12月发布的EgoSuite第一人称数据解决方案,目前已交付超30万小时数据,且每周正在生产超2万小时数据。在其跨本体数据映射与工业级评测基准(RoboFinals)的加持下,光轮智能不仅解决了Sim2Real的域差距痛点,更以极高的技术壁垒拿下了全球80%顶尖具身团队的客户份额。
智元机器人与优必选科技作为整机厂商的代表,选择了“本体-数据-模型-场景”重度耦合的战略闭环。智元在上海浦东斥资打造了4000平米超级数据工厂,部署近百台远征A2-D专机,实现单机单日千条数据的极速采集。
排在第六位的帕西尼感知科技,为行业提供了一个差异化的破局思路。在视觉与轨迹数据红海竞争中,帕西尼以多维触觉传感为核心,打造了年产能近2亿条的全模态具身数据产线。其Super EID Factory通过6D霍尔阵列式灵巧手与多视角视觉矩阵严格对齐,解决了工业精细装配、3C制造等领域对“接触力学”数据的需求。
排名榜单前列的无问智科、它石智航与简智机器人等第三方服务商,无一例外地走向了生态结盟之路。它石智航以人为中心(Human-centric)的四模态数据采集,与库帕思等场景方深度绑定;无问智科在长三角构建全域开放场景,联合数十家产业链上下游机构。
物理仿真引擎构建核心护城河,光轮智能领跑全球合成数据与评测生态
以光轮智能为代表的中国厂商在全球仿真合成数据细分赛道中已占据超过一半的市场份额。光轮智能自身也迎来了收入的爆发期,2025年营收超亿元,而2026年第一季度的收入已超越2025年全年。
光轮科技核心护城河体现在三个维度:
•首先是底层引擎的高保真度与生成效率。光轮智能的仿真引擎能够精准模拟软体、流体、多体复杂接触等物理特性,极大地弥合了Sim2Real(仿真到现实)的域差距。
•其次,光轮智能构建了大规模的非本体数据引擎,覆盖仿真合成数据与人类视频数据(EgoSuite)两大路径,实现具身数据的规模化生产。其数据解决方案已在全球范围内规模化交付,产能持续领跑行业。
•最后是强大的平台工程能力。其搭建的仿真评测平台 RoboFinals平台构建了100项高难度任务和场景,覆盖家居、工厂、商超等真实应用环境,所有任务都源于真实需求,确保与真实世界对齐,支持规模化评测。Isaac Lab-Arena 面向机器人基础模型的工业级规模化评测平台,引入真实世界任务定义与评测标准,已被阿里通义千问等多家顶尖模型团队用于内部评测。
最关键的是其在全球生态标准中的话语权。光轮智能不仅加入了国际权威的Newton TSC,参与制定SimReady数字资产标准,还推出了行业首个工业级评测基准RoboFinals。目前,全球80%的顶尖具身智能研发团队(包括英伟达、谷歌、DeepMind等)都在使用其提供的数据集与平台服务。
光轮智能具身全产业链基建平台
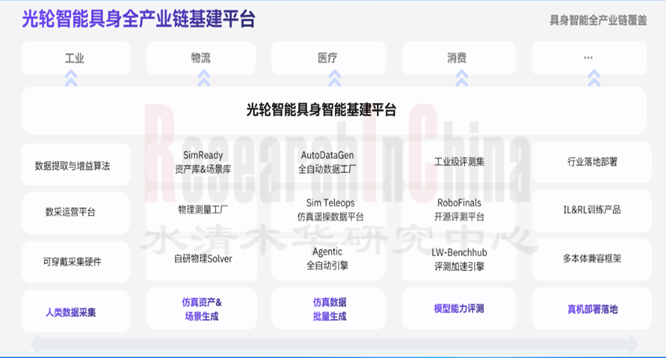
图片来源:光轮智能
多源融合采集方案成大势所趋,优势互补重塑数据生产管线
遥操作(Teleoperation)作为当前获取高质量真机数据的黄金准则,能够完美保留人类在操作过程中的隐性决策与真实力觉反馈。然而,这种1:1的映射技术面临着极其陡峭的成本曲线。以建设一个中等规模数采厂为例,动捕服、力反馈手套加上高自由度本体,单套硬件动辄数十万元。经测算,传统遥操作的单条有效数据成本高达8元以上,且单机日产能仅在千条左右。
与遥操作形成鲜明对比的是仿真合成技术的爆发。依托算力堆叠,仿真引擎能够在虚拟环境中24小时不间断生成包含极限工况的长尾数据,单条成本被极度压缩至毫厘之间。
例如,银河通用基于仿真平台,一周内便可生成亿级操作数据集。然而,看起来无限的仿真数据始终受制于Domain Gap(虚实鸿沟)。力学、接触、摩擦等物理参数的简化,使得纯仿真模型直接迁移至物理世界时极易失真。因此,“90%仿真预训练 + 10%真机微调”的融合范式成为当下的工程优解。
同时,为了平衡真实性与采集成本,以UMI(Universal Manipulation Interface)为代表的无本体/轻本体数据采集技术在2025年强势崛起。鹿明机器人推出的FastUMI Pro手持式采集系统,将传统激光基站替换为纯视觉SLAM定位,不仅将单条采集时间从50秒压缩至10秒,更将底层成本降至0.5元级别。更重要的是,UMI实现了数据与机器人硬件的彻底解耦,普通采集员在真实家庭或工厂即可完成毫米级精度的操作数据记录,让数据采集真正走出了实验室。
伴随大模型对数据需求维度的几何级膨胀,单一技术路线已无法满足“规模、成本、精度、泛化”的苛刻要求。行业全面迈向多源融合采集时代:以人类视频注入通用物理常识,以仿真合成数据海量覆盖长尾边界,以UMI采集分布式扩充真实交互动作,最后依托高精度遥操作进行垂直场景的专家级微调。
具身智能数据采集的四条主流路线对比

图片来源:《2026年具身智能机器人数据产业布局研究报告》
数据流通模式向标准化与平台化演进,数据超市与合规交易所加速演进
随着具身智能从研发走向落地,行业获取数据的方式正经历一场深刻的商业模式重构。过去“一客一采、高度定制、周期漫长”的业务形态,正迅速向标准化、平台化与DaaS化演进。
首先是“数据超市”模式的崛起。鹿明机器人是这一模式的先行者,2026年3月其推出了行业首个“FastUMI Pro数据超市”。鹿明没有局限于接单定制,而是将工业制造、酒店服务、家庭生活等十大核心场景的具身数据,细分为数十个标准化操作任务,直接在官网商城上架销售。用户能够像购买硬件标品一样采购涵盖视觉、位姿、力觉等多模态的数据集。
鹿明FastUMI Pro数据超市
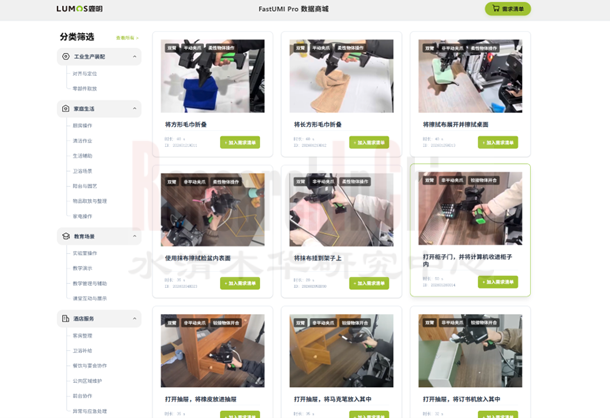
图片来源:鹿明机器人
其次是“云端数据商城”模式的落地。帕西尼感知科技联合腾讯云打造了具身智能“数据云商城”。该模式将庞大的多模态触觉数据集与云端算力深度解绑。客户无需自建本地算力服务器与存储集群,直接在云端进行数据筛选、格式转换与模型适配训练。标准化数据包线上一键交付,彻底打通了“海量数据供给-云端算力调度-模型高效训练”的闭环。
最为关键的是“数据交易所”打通了合规资产化的最后一公里。具身智能真实场景数据涉及复杂的知识产权、隐私脱敏及环境权属问题。目前,江苏省数据交易所、北京国际大数据交易所(北数所)等国家级枢纽已率先破局。例如,江苏省数据交易所完成了全国首单具身智能数据集场内交易(江苏箸境智能开发的2.5万条四场景数据集);北数所则正式上架了帕西尼的OmniSharing DB全模态数据集。
01 具身智能机器人数据核心技术体系与发展现状
1.1 具身智能机器人数据相关政策
具身智能机器人数据相关政策—国家层面
具身智能机器人数据相关政策—地方层面(1)
具身智能机器人数据相关政策—地方层面(2)
具身智能机器人数据工厂的国家层面政策支持
具身智能机器人数据工厂的地方层面政策支持
人工智能具身智能数据闭环管理规范
1.2 具身智能数据发展现状
具身智能数据产业链情况
具身智能数据的核心路径—模仿学习+高质量数据
具身智能数据金字塔详解
具身智能数据管理办法
全球具身智能数据市场规模 2023~2030
中国具身智能数据市场规模 2023~2030
1.3 具身智能数据企业排名分析
具身智能数据企业排名分析
具身智能数据企业总榜单(1)
具身智能数据企业总榜单(2)
具身智能数据企业总榜单(3)
数据规模产能与质量榜单(1)
数据规模产能与质量榜单(2)
数据规模产能与质量榜单(3)
数据规模产能与质量榜单(4)
数据技术底座与全链路能力榜单(1)
数据技术底座与全链路能力榜单(2)
数据技术底座与全链路能力榜单(3)
数据技术底座与全链路能力榜单(4)
数据集产品及其行业影响力榜单(1)
数据集产品及其行业影响力榜单(2)
数据集产品及其行业影响力榜单(3)
仿真与合成数据能力榜单
商业化落地与客户生态榜单(1)
商业化落地与客户生态榜单(2)
商业化落地与客户生态榜单
融资与产业资源榜单
1.4 具身智能数据采集方式
具身智能数据采集的四条主流路线
遥操作
目前四种主流遥操作设备简介
机器人遥操作(Teleoperation)主端设备简介
机器人遥操作(Teleoperation)完整采集流程
机器人遥操作(Teleoperation)成本结构解析
机器人遥操作数据的核心特点
机器人遥操作数据采集的考量因素
机器人遥操作数据格式
机器人遥操作中的人机交互目标
具身智能动捕在机器人遥操作中的作用及其优劣势
仿真合成
具身智能仿真环境数据生成技术现状
具身智能仿真技术原理及流程
数据仿真赛道:原生操作数据的规模化采集技术现状
数据合成赛道:生成式 AI 驱动的全链条数据生成技术现状
部分主流仿真平台详解
具身智能仿真合成数据的优劣势
人类视频数据
人类视频采集具身智能数据技术核心定义及边界
人类视频采集具身智能数据的全流程技术链路
人类视频采集具身智能数据路线的核心优势与差异化竞争力
人类视频采集具身智能数据路线的发展趋势及演进路线
特斯拉Optimus采用人类视频数据为核心训练燃料
UMI
UMI具身智能数据采集技术原理
UMI具身智能数据核心特点
UMI具身智能数据采集硬件构成及流程
UMI的数采方案与遥操作采集方案成本对比
UMI生态演进方向
UMI(通用操作接口)数据与 EGO(第一人称自我中心)数据的核心能力和短板
UMI(通用操作接口)数据与 EGO(第一人称自我中心)数据的能力互补
1.5 数据交易平台
具身数据交易所全流程交易体系
核心交易场所的布局与里程碑事件(1)
核心交易场所的布局与里程碑事件(2)
核心交易场所的布局与里程碑事件(3)
具身数据交易所当前核心痛点与发展瓶颈
02 具身智能机器人数据生态构建与未来发展趋势
2.1 具身智能数据企业对标分析
具身智能数据核心技术路线及生态布局能力对标分析(1)
具身智能数据核心技术路线及生态布局能力对标分析(2)
具身智能数据核心技术路线及生态布局能力对标分析(3)
具身智能数据采集硬件与采集方案对标分析(1)
具身智能数据采集硬件与采集方案对标分析(2)
具身智能数据采集硬件与采集方案对标分析(3)
具身智能数据基建与产能规模对标分析(1)
具身智能数据基建与产能规模对标分析(2)
具身智能数据集产品与核心数据资产对标分析(1)
具身智能数据集产品与核心数据资产对标分析(2)
具身智能数据集产品与核心数据资产对标分析(3)
具身智能数据商业化能力与商业模式对标分析(1)
具身智能数据商业化能力与商业模式对标分析(2)
具身智能数据商业化能力与商业模式对标分析(3)
2.2 具身智能数据工厂建设
具身智能机器人数据工厂区域布局
具身智能机器人数据工厂发展趋势
具身智能机器人数据工厂商业模式
帕西尼具身智能超级数据采集工厂
帕西尼超级数据采集工厂实时数据情况
智元机器人具身智能数据采集工厂
智元机器人数据采集硬件以及质量把控环节
智元机器人数据服务
长三角(德清)具身智能数据采集工厂
无锡市具身智能机器人工业数据采集与实训中心
北京人形机器人创新中心具身智能数据训练基地
2.3 具身智能数据发展趋势
趋势一:“无本体”或“轻本体”数据采集技术加速成熟
趋势二:数据生产双引擎成型,“真实数据 + 仿真数据” 的融合范式规模化落地
趋势三
趋势四
趋势五
趋势六
趋势七
趋势八
趋势九
03 具身智能机器人本体厂商的数据布局
3.1 智元机器人
智元机器人简介
智元具身智能全栈数采方案
智元工业级的“Sim-to-Real(仿真到现实)”数据驱动闭环引擎
智元具身智能全栈数采系统分析表
智元具身智能全栈数采方案—数采本体(1)
智元具身智能全栈数采方案—数采本体(2)
智元具身智能全栈数采方案—遥操作设备
智元具身智能全栈数采方案—数采平台
智元具身智能数采平台流程详解
智元机器人数据集
智元机器人开源仿真平台
3.2 帕西尼感知科技
帕西尼感知科技公司简介
帕西尼携手腾讯云打造“数据云商城”
帕西尼全模态数据采集系统
帕西尼全模态具身智能数据集
Super ElD Factory 的商业及技术闭环
帕西尼跨本体数据映射方案
3.3 银河通用
银河通用简介
银河通用具身数据采集路线
银河通用苏州具身智能数据采集中心
银河通用灵巧手功能性抓取合成大数据集
银河通用灵巧手抓取数据集
银河通用跨本体全域环视的导航基座大模型
银河通用训练数据体系
银河通用零部件基准数据集
3.4 星海图
星海图简介
星海图具身智能数据商业模式
星海图具身数据采集路径
星海图RSR真值重建技术
星海图Galaxea Open-World Dataset数据集
星海图开放世界数据集数据分类及特征
星海图数据无 / 低标注技术
星海图数据采集硬件R1 Lite
星海图R1 Teleop 同构遥操作平台以及R1 VR 遥操作设备
星海图具身智能开发平台—EmbodimentHuman Interface
3.5 鹿明机器人
鹿明机器人简介
鹿明机器人“采–训–推”一体化闭环能力
鹿明机器人具身智能数采设备
鹿明机器人核心技术
鹿明机器人背包版UMI数采设备
鹿明机器人应用案例
鹿明机器人数采设备
鹿明机器人数据超市
3.6 傅利叶机器人
傅利叶机器人简介
傅利叶机器人具身智能数据采集核心布局
傅利叶机器人开源全尺寸人形机器人数据集
傅利叶机器人数据采集本体
傅里叶机器人具身数据全流程工具链
傅里叶机器人具身数据应用前瞻布局—脑机接口
3.7 北京人形机器人创新中心
北京人形机器人简介
北京人形机器人具身数据闭环一站式平台
北京人形机器人数据集
北京人形机器人数据收集特征(1)
北京人形机器人数据收集特征(2)
北京人形机器人数据收集策略
北京人形机器人数据管理以及质检
北京人形机器人高保真铰接物品数字资产数据集
3.8 乐聚机器人
乐聚机器人简介
乐聚机器人数据领域战略合作
乐聚机器人两大工业场景数据集成功获批江苏省数据知识产权登记证书
乐聚机器人具身人形真机数据解决方案
乐聚机器人训练场综合建设解决方案
乐聚机器人具身数采核心技术底座
乐聚机器人训练场运营服务方案
乐聚机器人全尺寸人形机器人真机数据集
乐聚机器人灵巧操作数据集
3.9 优必选科技
优必选机器人简介
优必选人形机器人多模态数据采集测试中心
优必选具身智能数据采集方案场景端
优必选具身智能数据采集方案采集处理端及应用端
优必选具身智能大模型数据转化流程
优必选具身智能大模型数据回流机制
优必选为构建了四种数据集
优必选虚拟仿真平台
3.10 逐际动力
逐际动力简介
逐际动力基于多元数据的具身智能训练范式
逐际动力工作流程
逐际动力基于视频数据的具身机器人操作算法
逐际动力核心技术特点
逐际动力训练范式
04 具身智能数据供应商布局
4.1 诺亦腾机器人
诺亦腾机器人简介
诺亦腾机器人数据工厂解决方案
诺亦腾机器人训练数据生产模式
训练数据生产模式详解
诺亦腾利用 NVIDIA Isaac 和动作捕捉构建具身智能数据工厂
诺亦腾与智元机器人合作案例
4.2 极佳视界
极佳视界公司简介
极佳视界具身世界模型
极佳视界具身智能机器人
极佳视界与湖北人形机器人创新中心共建具身智能数据工厂
极佳视界具身大模型
4.3 简智机器人Genrobot
简智机器人简介
简智机器人产品矩阵
简智机器人具身数据采集全流程
简智机器人无本体具身数据集
简智机器人数采设备(1)
简智机器人数采设备(2)
简智机器人数据处理平台
简智机器人具身智能数据产线
4.4 国家地方共建人形机器人创新中心具身数据
国地中心具身数据采集布局
“上海虚实融合具身智能训练场”国家级标准化试点落沪
国地中心“1+N”具身数据训练场布局
数据集获信通院质量评估证书
国地中心参与的国家及地方层面具身智能数据政策制定
国地中心与中国信通院联合牵头研制国内首个具身智能数据集质量评价行业标准
国地中心具身数据采集训练全流程闭环
具体流程分析
"白虎"异构机器人数据集
"白虎"异构机器人数据集首批开源 v1.0
“白虎”异构机器人数据集数据分布占比
“白虎”异构机器人数据集原子技能及工具链
"白虎"异构机器人数据集的高度统一与复用性设计
白虎“异构机器人数据集核心特点
“白虎”异构机器人数据集采集流程
白虎跨本体视触觉多模态数据集
跨本体视触觉多模态数据集
白虎-VTouch数据集数据覆盖类型
跨本体规模化数采平台技术特点
面向真机模型训推的统一算法框架
白虎助力下一代具身VTLA与训练场标准建设
全尺寸人形机器人真机数据集
面向真实场景与长时序任务的人形机器人数据集
数据集”核心特点
数据集”场景分布及技术创新
4.5 江苏箸境智能
江苏箸境智能简介
箸境智能携手打造江苏省人形机器人数据集采中心
箸境智能数据采集本体
箸境智能数据基础设施与采集能力建设
箸境智能数据集在江苏省数据交易所上架并完成交易
4.6 它石智航
它石智航简介
它石智航与库帕思共建“具身数据星火计划”
它石智航数据采集范式
它石智航数据采集套件(1)
它石智航数据采集套件(2)
它石智航具身数据引擎
它石智航可规模化真实具身多模态数据集
它石智航数据集核心参数
它石智航由数据构建出世界模型
4.7 穹彻智能
穹彻智能简介
穹彻智能与刻行时空达成战略合作,联合打造异构机器人训练场解决方案
穹彻智能口袋机采
穹彻智能口袋机采数据质量控制机制
穹彻智能一站式具身智能开发工具链
穹彻智能伴随式数据采集系统
穹彻智能的原子技能库
4.8 枢途科技
枢途科技简介
枢途科技开源具身数据集
枢途科技视频具身数据解决方案
枢途科技具身数采的视频处理引擎
4.9 无问智科
无问智科简介
地瓜机器人携手地平线、无问智科1万小时开源数据集计划
无问智科具身智能数据三大布局
无问智科具身智能全链路数据合成解决方案
无问智科具身数据数字资产建设
无问智科物理AI数据基座平台
无问智科具身智能数据采集训练场
无问智科物理AI仿真平台
无问智科多模态自动化数据标注平台
05 具身智能数据服务及仿真企业布局
5.1 仿真平台
具身智能机器人仿真平台(1)
具身智能机器人仿真平台(2)
具身智能机器人仿真平台(3)
5.2 艾欧智能
艾欧智能简介
艾欧智能数据平台
艾欧智能数据平台功能模块
艾欧智能具身数据软件平台服务
艾欧智能数据即服务产品
艾欧智能机器人第三代遥操作数据采集系统
艾欧智能机器人遥操作数据采集系统参数
艾欧智能真实世界数据采集系统
5.3 光轮智能
光轮智能简介
光轮智能加入开源 GPU 加速物理仿真引擎 Newton 的 Technical Steering Committee
光轮智能核心产品结构
光轮智能面向具身智能和世界模型研发的人类数据解决方案
光轮智能仿真环境资产
光轮智能工业级具身仿真评测平台
光轮智能全栈具身评测体系
5.4 灵初智能
灵初智能简介
灵初智能真人数据采集系统
灵初智能便携式具身数采套装
灵初智能一站式数据采集平台
灵初智能数据集
5.5 澳鹏
澳鹏简介
澳鹏一体化数采方案
澳鹏具身智能数据产品服务及交付成果
澳鹏数据集产品
澳鹏具身智能数据开发平台
5.6 松应科技
松应科技简介
松应支持大湾区首个具身智能数据枢纽落地深圳龙岗
松应科技仿真系统一体机
松应科技仿真系统一体机技术能力
松应科技ORCA系统实际应用案例
松应科技工业具身智能仿真训练一站式解决方案
松应科技物理AI 个人开发者平台