2026年4-5月,具身智能产业迎来了自概念提出以来最深刻的范式转变。过去两年,行业普遍遵循 "大模型 + 机器人本体" 的技术路线,试图通过互联网数据预训练赋予机器人通用能力,但在真实物理场景中遭遇了泛化能力不足、操作精度不够、鲁棒性差等核心瓶颈。
物理 AI 的本质,正如帕西尼感知所定义的,是 "不是基于统计关联,而是基于物理因果进行决策和修正,最终对物理世界产生连续作用的智能"。在这一阶段,机器人必须学会主动感知物理世界、理解动作与结果的因果关系、并根据实时反馈完成物理AI数据飞轮的闭环。
一、资本加速向物理AI数据与硬件基础设施集中
2026年4月至5月,资本对具身智能赛道的热情丝毫未减,并呈现出显著的“基建化”投资特征。单纯的模型算法创新已不足以支撑高估值,资本更青睐那些具备大规模高质量数据生产能力和核心硬件规模化量产潜力的企业。
根据佐思汽研的最新统计,2026年仅4-5月期间,纯具身智能领域的已披露融资总规模超240亿元人民币。若将节卡机器人、纽娲机器人、灵初智能等12起未披露具体金额的融资事件计算在内,行业实际总融资规模将远超这一数值。
其中超过 65% 的资金流向了与物理感知、数据采集、因果推理相关的技术方向。这标志着行业已从 "大模型" 中走出,进入了以物理真值为核心的发展新阶段。
头部企业如千寻智能在3-4月的两轮A轮累计融资30亿元,星海图完成20亿元B+轮融资后估值超200亿元,自变量机器人也斩获近20亿元B轮融资。这些巨额资金背后的驱动力,正是源于对物理AI规模化数据生产与硬件制造的重资产投入需求。
2026年4-5月融资规模数据
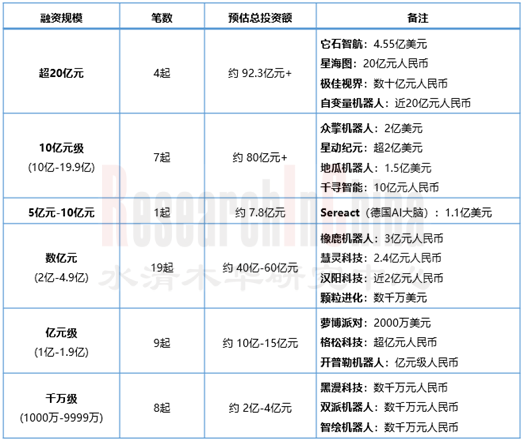
来源:佐思汽研《中国AI及机器人技术监测报告(2026年5月期)》
二、数据生产工业化与物理世界模型成为物理AI的数据基座
2026年4月,行业不再执着于 "仿真数据能否替代真实数据",而是全面转向“如何规模化生产可泛化的真实物理交互数据”。数据瓶颈已成为制约物理AI发展的“第一性”问题。
帕西尼感知在本月明确提出行业核心痛点:主流的第一视角视频数据属于低维数据,仅能支撑模型基础预训练,后训练阶段需要极长的迭代周期。其给出的解决方案是“全模态异构数据捕捉”5.0方案——从视觉、触觉、本体感知、空间轨迹等所有维度完整捕捉人类与物理世界的交互信息。
帕西尼的实践极具代表性:帕西尼已在全球布局5座大型数据采集工厂,位于宿迁的3万平米的超大型旗舰数据采集工厂于4月正式开幕,单日可采集150万笔数据,年产能达21亿条。其自研的82自由度五指采集设备,搭载霍尔式绝对值角度编码器与第三代触觉感知技术,可采集15种感知维度。
英伟达则从另一维度解决问题。其在2026 GTC宣布的“物理AI数据工厂Blueprint”是一个开放参考架构,旨在统一并自动化训练数据的生成、增强和评估流程。该蓝图利用Cosmos世界基础模型和编程智能体,能将有限的真实数据转化为大规模多样化数据集,尤其擅长生成现实世界中采集成本极高的“长尾场景”。Uber、Skild AI等已首批采用。
帕西尼感知数据采集范式演进路线
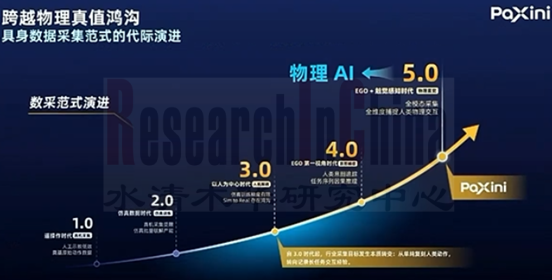
图片来源:帕西尼感知
三、世界模型与动作控制架构实现因果推理突破
如果说数据是燃料,那么模型就是引擎。本月,以英伟达Cosmos和智元GO-2为代表的“世界基础模型”以及“具身基座模型”取得关键突破,其核心进化方向是:让AI理解物理定律(如重力、摩擦力)和因果逻辑(推杯子,杯子会移动而非消失)。
英伟达对物理AI的定义,核心在于区分其与传统生成式AI。后者主要基于文本和二维图像训练,在三维空间感知上存在局限。而物理AI必须理解真实世界的三维空间关系、遵循物理定律。
其Cosmos世界基础模型采用的技术逻辑是“物理Token化”——通过高度优化的视觉编码器,将物理世界的视频数据转化为Transformer可处理的“物理Token”。它学习的不仅是像素变化,更是因果律。
同时,英伟达的GR00T N系列在不到14个月内完成了四代迭代。最新N1.7模型升级为“动作级联双系统”,将高级推理与低级运动控制彻底分离。系统2负责长上下文推理(256K token),系统1仅需4步去噪即可输出动作,实时性提升10倍以上。
智元机器人发布的具身智能基座大模型GO-2,则瞄准行业长期存在的“语义-运动鸿沟”。其首创的“动作思维链”与“异步双系统架构”,直接对标英伟达GR00T系列的“思考中枢(系统2)+运动中枢(系统1)”理念。GO-2试图打通从逻辑推理到精准动作执行的关键链路。
英伟达GR00T N系列四代模型演进历程
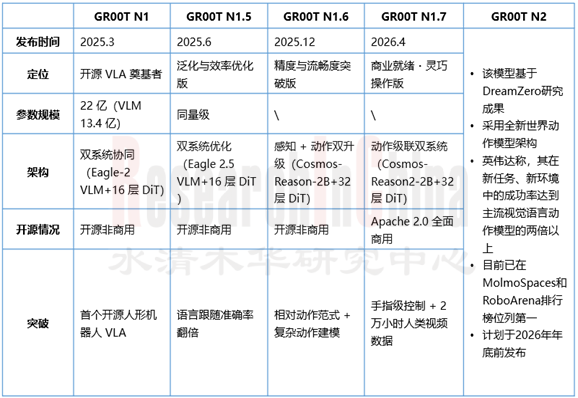
来源:佐思汽研《中国AI及机器人技术监测报告(2026年5月期)》
四、触觉与力觉感知技术处于大规模商业化前夜
视觉让机器人“看到”世界,但唯有触觉与力觉,才能让它真正“感受”并“作用”于物理世界。本月,围绕高精度、多维度的触觉与力觉感知技术,迎来了密集的产品发布与资本关注。
帕西尼感知是这一领域的绝对标杆。其第三代高精度ITPU多维触觉传感器,及搭载该技术的全模态采集手套,定义了从“指尖”到“大脑”的完整感知链路。其设备可采集接触力、分布力、侧向力、摩擦力等多达15种感知维度,单点精度极高。
在“第三届中国人形机器人生态大会”上,帕西尼进一步阐释了其“全模态高保真数据采集方案”,强调15种感知维度的数据对齐与融合,是解决机器人对人类意图理解偏差的根本路径。
供应链端,迈来芯(Melexis)宣布其磁性触觉传感器Tactaxis已完成工业化过渡,并与傲意科技达成合作,将集成于下一代高精度协作灵巧手。保隆科技依托其20年车规级传感器经验,推出电感式编码器,声称突破了人形机器人的感知精度瓶颈。
开普勒机器人则发布了国内首套原生适配VTLA全感知模型的力触觉全栈数采方案“Kepler-OmniTac”,包含数采套件、数据集与大模型,试图从软硬件一体角度降低力触觉应用门槛。
资本市场的反应最为直接。柔性触觉传感器企业“灵动佳芯”完成近亿元A轮融资;专注灵巧手的“源升智能”完成上亿元Pre-A轮融资;“灵心巧手”完成B+轮融资。
帕西尼感知第三代专业级ITPU触觉传感器
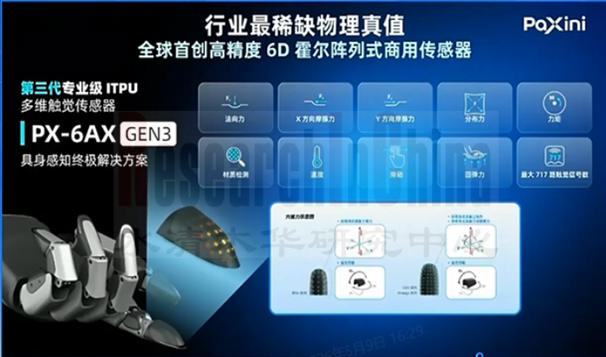
图片来源:帕西尼感知
五、商业化订单与产能放量验证物理AI真实价值
物理AI的技术突破最终要接受商业落地的检验。2026年4月,行业不再只谈“潜力”和“愿景”,而是开始亮出实实在在的订单、产能和财报。数据清晰地显示,产业正从百花齐放的探索期,迈入优胜劣汰的验证期,资本和资源正迅速向具备可规模化商业模式的头部企业集中。
首先是量产与订单的硬指标。智元机器人在3月28日宣布第10,000台通用具身机器人“远征A3”正式下线,这是一个极具象征意义的数字。紧接着,东方精工与乐聚联手打造的国内首条年产能“万台级”人形机器人产线在广东启用。魔法原子更是在4月斩获大健康行业1.5亿元机器人采购大单。优必选的人形机器人落地欧洲零售物流,机器人不再是实验室的样机,这些订单均代表了真实场景的付费意愿。
其次是财报数据的揭示。优必选2025年财报显示,总营收达20.01亿元,同比增长53.3%,净亏损收窄32%,说明商业模式正在改善。埃斯顿2025年归母净利润同比增长105.55%。而拓斯达营收同比下降12.59%,显示出行业的分化。
2026年4-5月商业化落地数据

来源:佐思汽研《中国AI及机器人技术监测报告(2026年5月期)》
2026年4-5月产能与供应链数据
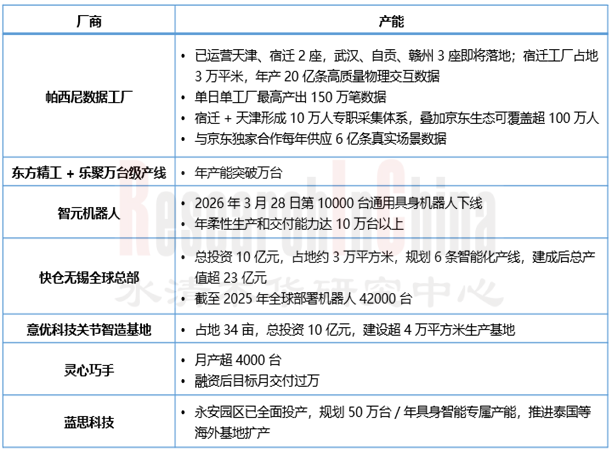
来源:佐思汽研《中国AI及机器人技术监测报告(2026年5月期)》
01 专题洞察
1.1 英伟达物理AI
英伟达对于物理AI的定义
英伟达Cosmos:世界基础模型
英伟达GR00T N系列四代模型演进历程
GR00T N系列四代模型架构和动作控制范式演进
GR00T N系列四代模型训练数据演进及指标对比
英伟达物理 AI 数据工厂 Blueprint
英伟达物理 AI 数据工厂 Blueprint 完整工作流程
NVIDIA 物理 AI 领域最新研究、突破与资源(1)
NVIDIA 物理 AI 领域最新研究、突破与资源(2)
1.2 帕西尼感知物理AI
帕西尼感知物理AI在具身智能中的体现
帕西尼提出的物理 AI 新范式:全模态矩阵智能感知 5.0
帕西尼感知对于物理AI的具身进化逻辑(1)
帕西尼感知物理AI高质量数据采集手套 PXCap
帕西尼感知第三代高精度ITPU多维触觉传感器
帕西尼感知对于物理AI的具身进化逻辑(2)
帕西尼感知对于物理AI的具身进化逻辑(3)
1.3 具身智能4-5月数据统计
政策以及财务量化数据
融资事件数据统计
商业化落地数据(1)
商业化落地数据(2)
产能与供应链量化数据
招聘教育以及行业会议专家量化预测数据
02 新闻动向
2.1 政策
具身智能领域首份行业标准发布
AIRS获批组建具身智能机器人省级工程研究中心
工信部等十部门联合印发《人工智能科技伦理审查与服务办法(试行)》
工信部部署“十五五”汽车产业标准建设
我国牵头立项具身智能全球首个国际标准
2.2 机器人本体厂商相关
上汽通用迎首款人形机器人员工上岗
PAL-V飞行汽车获荷兰初始评估
非夕科技发布Enlight初昕机器人
猎户星空推出AIAgent服务机器人
东方精工乐聚联手,国内首条万台级人形机器人产线启用
Vbot维他动力与京东达成战略合作
全球最大货运无人机长鹰-8郑州首飞成功
非夕科技与全球EMS领域头部厂商签订战略合作
智元第10,000台通用具身机器人正式下线
埃斯顿酷卓携手紫金星宇,探索“具身智能+6G”新基建
云深处机器人化身“赛博茶农”,打通春茶采运“最初一公里”
智元与香港中文大学达成战略合作
萝博派对打造基于RDK X5的全开源人形机器人
............................
深谋科技“伏安”人形机器人即将交付国网电力
小米全新具身机器人亮相投资日活动
超维动力发布全球最高自由度人形机器人KAI
乐聚机器人发布巡检版1.0
美团“小黄蜂”配送机器人落地重庆江北机场
面壁智能与车联天下达成战略合作
2.3 供应链—硬件
意优科技机器人关节智造基地落户锡山
巨蟹智能发布R48-Lite关节模组
灵生科技发布LivUMI方案
............................
迈来芯与傲意科技合作
灵龙机器人搭载旭日S600,突破2025年半马自主奔跑最佳成绩
保隆科技电感式编码器突破人形机器人感知精度瓶颈
芯驰发布战略2.0,推出具身智能全栈芯片方案
2.4 供应链—软件
全国最大人形机器人训练基地于北京揭牌
诺亦腾机器人携手智象未来,破解具身智能数据瓶颈
高德全量开源全球首款统一架构具身操作基座模型ABot-M0
思灵机器人Agile Robots完成对蒂森克虏伯自动化工程公司的收购
Generalist AI发布GEN-1模型
............................
戴盟机器人发布具身数据集Daimon-Infinity
Zeno AI入局具身智能
智平方开源三大前沿技术,重塑具身智能新范式
地瓜机器人宣布RDK Studio完成关键升级
珞石联合高通发布具身机器人一站式TurnKey方案
五八智能与当虹科技达成战略合作
2.5 融资与市场动态
越疆科技2025年营收增31.7%
优必选发布2025年年度业绩报告
埃斯顿发布2025年年报
极智嘉2025年营收31.71亿
拓斯达发布2025年年报
格松科技宣布完成新一轮超亿元融资
水下海洋具身机器人企业世航智能获数亿元融资
飞行时代科技融资近亿
灵猴机器人完成数亿元B轮融资
庭院机器人公司「汉阳科技」完成近2亿元融资
纽娲机器人获得种子轮融资
............................
协作机器人企业节卡机器人获新一轮产业资本融资
零重力飞机工业正式完成1.5亿元人民币Pre-B轮融资
知行机器人获近亿元两轮融资
微分智飞完成数亿元A1轮融资
萝博派对宣布完成2000万美元天使轮融资
炒菜机器人「橡鹿科技」获3亿元融资
聆动通用完成新一轮数亿元Pre-A融资
「灵猴机器人」完成数亿元融资
灵心巧手完成B+轮融资
上海焊接机器人研发商昇视唯盛获数千万元A+轮融资
03 百家谈
3.1 第三届中国人形机器人生态大会(1)
3.2 第三届中国人形机器人生态大会(2)
3.3 第三届中国人形机器人生态大会(3)
3.4 第三届中国人形机器人生态大会(4)
3.5 第三届中国人形机器人生态大会(5)
3.6 罗兰贝格:汽车与机器人产业的交叉机遇与风险
3.7 浙江人形机器人创新中心:技术产品体系与生态建设
3.8 乐聚机器人:乐聚的真机数据体系建设实践
3.9 众擎机器人:商业化聚焦商业服务、安防科技、文旅三大领域
3.10 帕西尼感知:全模态高保真数据采集方案
3.11 哈工大机器人研究所:三大技术路线以及分阶段落地路径