具身智能产业的迅猛发展,芯片技术的持续进步是关键动力之一。面向不同应用场景的机器人,对芯片的选取需求存在差异,以免由于选择不当,出现“算力过剩”或者“性能不足”的问题。此外,具身智能产业的发展也依托于大模型技术的突破性进展,机器人的智能水平显著提高,使得机器人能够进行自主判断、执行复杂任务。
具身智能市场持续扩大,芯片性能需求不断增加,芯片厂商推出“全栈”解决方案
机器人芯片市场正处于高速增长期,2025年全球通用具身智能机器人总出货量达1.8万台,2026年预计突破6万台。当前,芯片巨头都在推出面向具身智能SoC芯片,例如英伟达推出Jetson系列、高通IQ10系列等;同时提供机器人开发平台,例如英伟达提供Isaac开源平台、瑞芯微RKNN第二代神经网络模型转化与优化工具、黑芝麻智能推出面向机器人产业的SesameX多维智能计算平台等,以满足客户的快速应用部署与模型开发。
目前,具身智能SoC芯片也在不断演进:
•趋势一:芯片算力需求急速增长
英伟达最新发布的Jetson T5000基于Blackwell GPU架构,AI算力高达2070 FP4 TFLOPS,是前代Jetson Orin的7.5倍;地平线(地瓜机器人)的RDK S100P,单芯片集成CPU+BPU+MCU,提供120 TOPS算力。随着算法复杂度的持续提升,机器人算力需求正从当前的200-500 TOPS逐步提升至500-1000 TOPS。但值得注意的是,行业不再只是算力的堆砌,已经转向“效能优先”,算法的优化使得效率成为一个重要指标。
英伟达NVIDIA Jetson Thor 系列规格
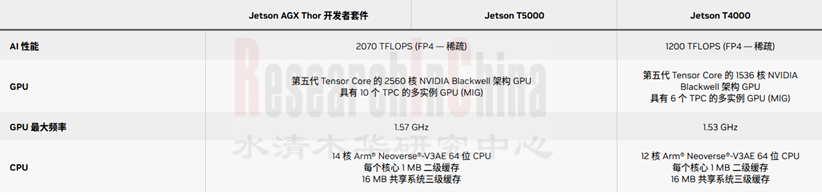
来源:网络
•趋势二:芯片厂商向先进制程演进
主流芯片厂商已经向先进制程工艺,英伟达Jetson AGX Thor采用4nm制程工艺,英特尔第三代酷睿Ultra采用Intel 18A制程工艺,瑞芯微RK3588采用8nm制程工艺,联发科最新推出的Genio Pro采用3nm制程工艺,极高提升芯片性能。
联发科最新IoT SoC芯片Genio Pro
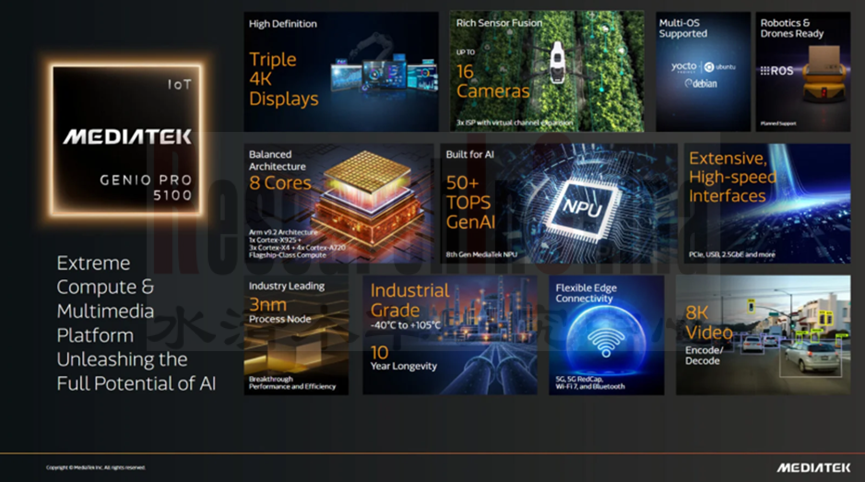
来源:网络
•趋势三:具身智能芯片厂商正从“单一SoC厂商”向“全栈式芯片平台提供商”转型
以芯驰科技为例,在推出具身智能大脑SoC芯片的同时,也推出智控小脑SoC、高性能MCU,以打造具身智能全栈解决方案,覆盖“大脑-小脑-躯干-关节”的完整架构,产品矩阵覆盖从负责高层认知与决策的大脑主控SoC,到负责运动协调与实时控制的小脑智控芯片,再到面向激光雷达/机器视觉、运动中枢、灵巧手和关节模组的E3-R系列MCU,以实现全链条芯片覆盖。
芯驰科技具身智能全栈方案
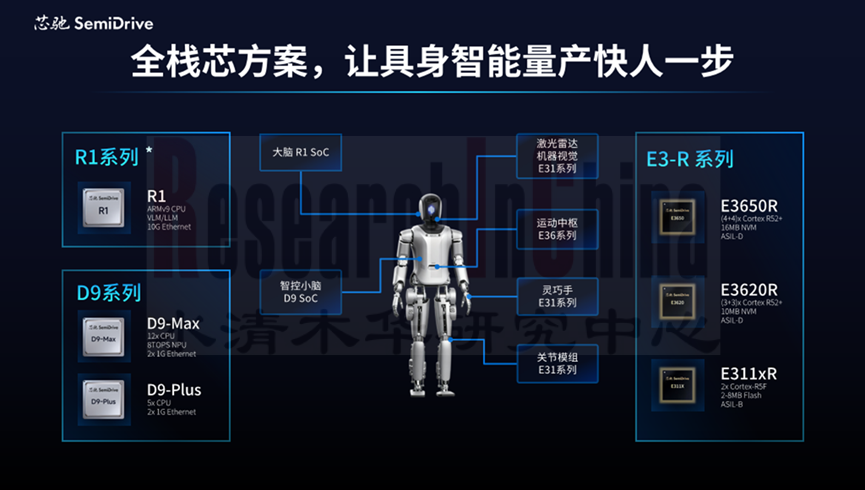
来源:芯驰科技
其中,智控小脑D9-Max和机器人关节模组MCU产品E311x-R已经实现规模化量产,与多家头部机器人企业达成深度合作,成功将车规级的高性能、高可靠性带入机器人领域。
D9 Max采用了专门为小脑应用优化的架构设计,基于硬隔离架构和硬件虚拟化技术,包含一个8核2.0GHz Cortex-A55 CPU Cluster,一个4核2.0GHz Cortex-A55 CPU Cluster,以及3对双核锁步的800MHz Cortex-R5F,以及8TOPS NPU、GPU等计算单元。单芯片实现运控系统、人机交互以及EtherCAT主站三项核心功能的部署,将传统方案需要三颗芯片实现的功能集成到一颗芯片。
高性能MCU(E3-R系列) 在关节控制领域取得实质性进展,满足高功能安全与信息安全要求,提供一站式方案。其中E311x-R作为关节模组主控芯片,具备高实时、高稳定的算力输出能力,采用双R5F内核,主频高达400MHz,在实际研发中,双核可以将电机控制与通信处理分开处理,实现专核专用,性能更强。
在具身智能大脑SoC上,芯驰科技复用在汽车领域的端侧大模型能力的积累,正在研发下一代机器人大脑芯片R1,采用ARM V9.2架构CPU和全新高性能NPU,实现低功耗条件下,MLLM/VLA模型等具身端到端模型的的端侧部署。
芯驰科技具身智能大脑SoC芯片结构图

来源:芯驰科技
•趋势四:芯片厂商正推出全栈自研的工具链
瑞芯微推出第二代神经网络模型转换与优化工具RKNN-Toolkit2,作为连接主流深度学习框架与Rockchip NPU(神经网络处理单元)硬件平台的桥梁,旨在帮助开发者将训练好的AI模型高效、便捷地部署到嵌入式设备上。黑芝麻智能华山 A2000高效易用山海AI工具链,覆盖从模型优化到端侧部署的完整流程,能够为开发者提供一套高效易用的模型开发与部署体系。芯驰科技提供了完善的软硬件开发套件,推出了D9-Max应用开发套件,方便客户和独立开发者快速进行应用部署和实机开发。
芯驰科技具身智能芯片软硬件开发套件

来源:芯驰科技
具身机器人主机厂商芯片和算法的选择
具身智能的智能化水平,本质上是算法与芯片协同进化的结果,二者相互依存、相互驱动,共同构成了机器人智能系统的核心闭环。
部分具身智能机器人主机厂商芯片与算法选择

来源:佐思汽研《2026年具身智能(人形机器人)主控SoC芯片研究报告》
以智元机器人灵犀 X2为例,其主控SoC芯片基础算力板采用两颗瑞芯微RK3588芯片,替代上一代采用的Jetson Xavier,实现成本与性能双重提升;RK3588的6TOPS NPU在运动控制和感知融合场景表现优异,同时功耗降低7W;高算力板则采用NVIDIA Jetson Orin NX ,总AI算力可达169 TOPS。
在算法上,灵犀 X2大脑搭载自研智元启元大模型(GO-1),该模型采用VLM(多模态大模型) + MoE(混合专家)组成的Vision-Language-Latent-Action(ViLLA)架构,使得灵犀 X2具有超强学习、小样本快速泛化以及持续进化的能力。灵犀 X2小脑采用Xyber-Edge控制器,负责机器人动作的协调与决策。该控制器采用144核异构计算架构,通过动态分配推理任务至NPU集群、控制指令至FPGA阵列,将传统运动规划的12层控制架构压缩为3层隐式规划,实现450Hz实时闭环控制,对比特斯拉Optimus的280Hz闭环频率具有显著优势。
国内首个通用具身基座大模型:智元启元大模型(GO-1)框架图
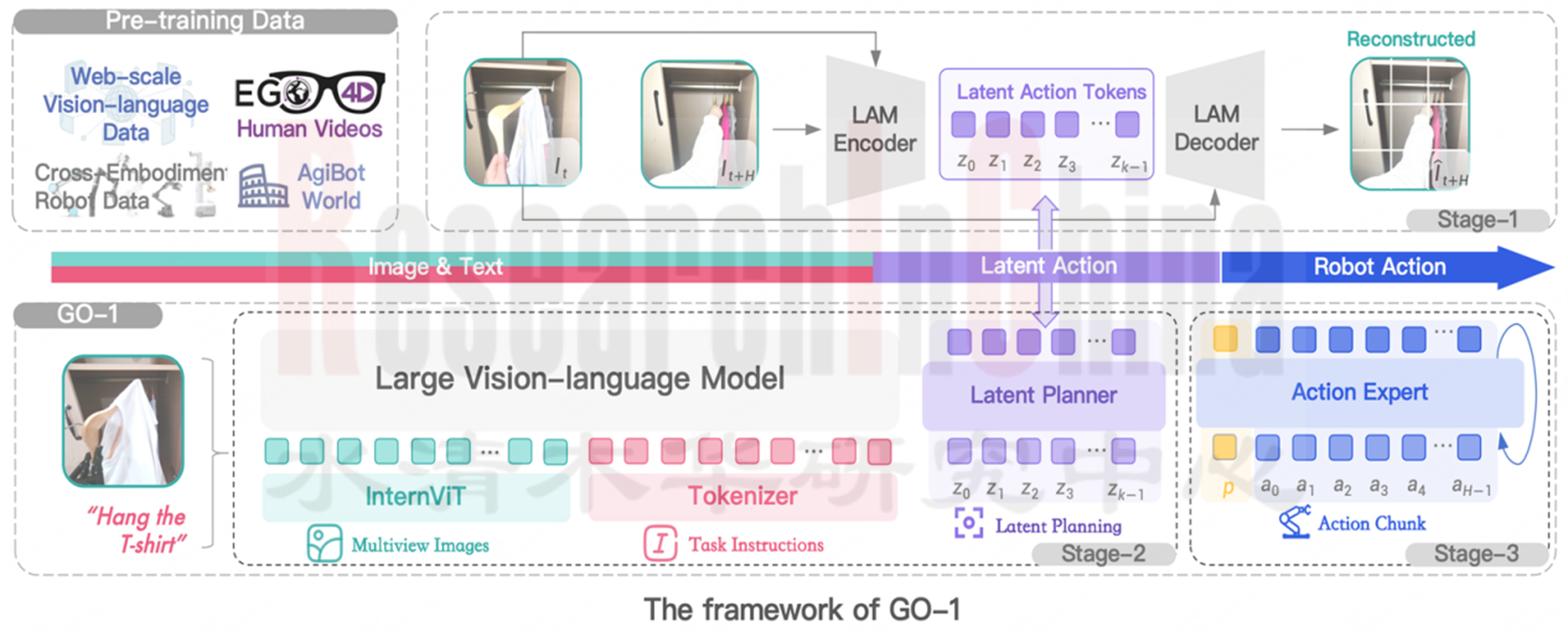
来源:网络
智元机器人顺应具身智能发展,智元机器人推出“远征”、“灵犀”和“精灵”三个系列分别面向工业制造、商业服务、数据科研这三大类场景,形成差异化定位与协同互补的布局,并向规模化量产落地迈进。
智元机器人产品系列表
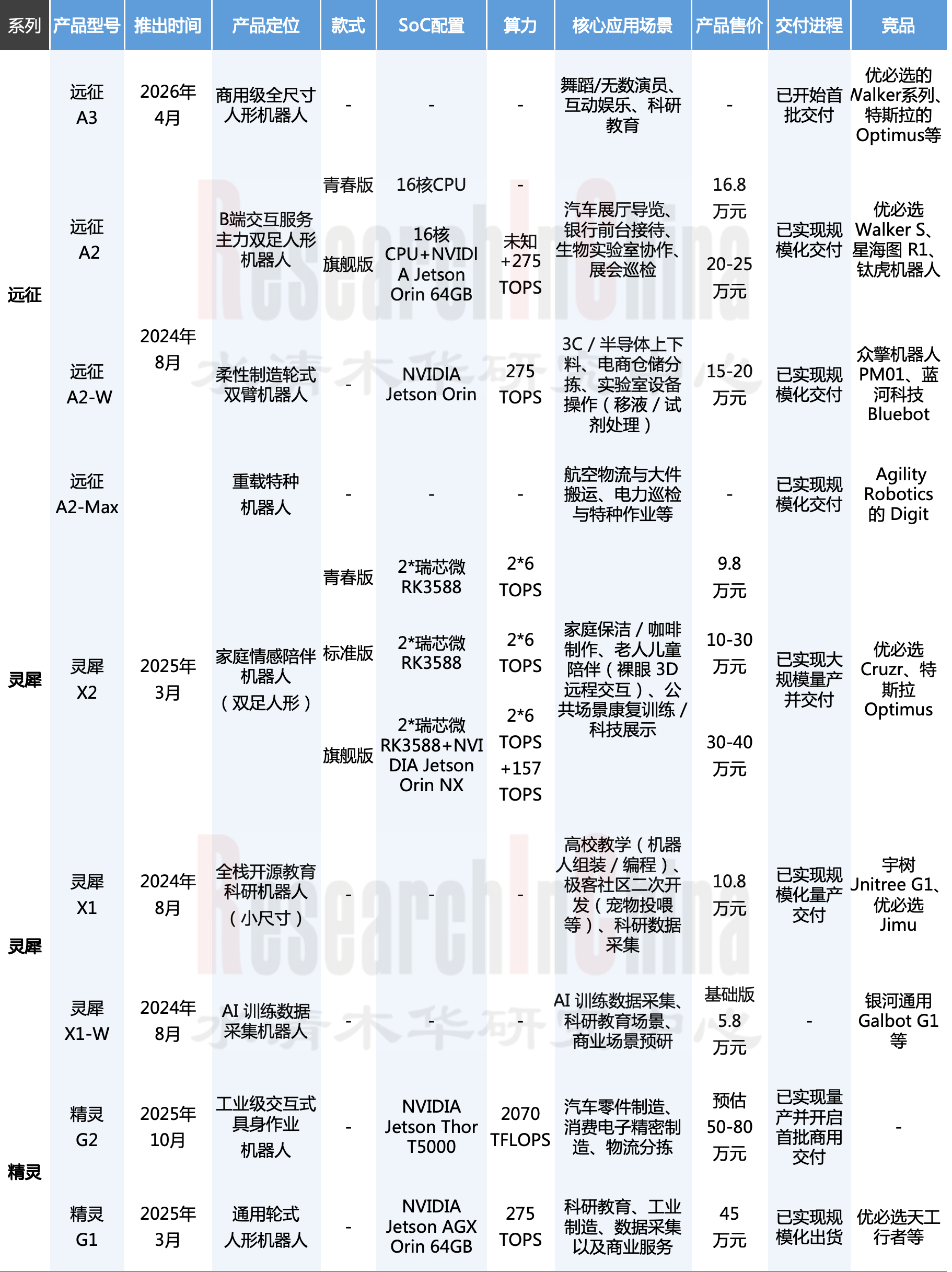
来源:佐思汽研《2026年具身智能(人形机器人)主控SoC芯片研究报告》
01 具身智能市场及应用场景
1.1 具身智能基本概念及名词解释
具身智能基本概念(1)
具身智能基本概念(2)
具身智能基本概念(3)
具身智能名词解释(1)
具身智能名词解释(2)
1.2 具身智能市场前景
具身智能发展演进历程
具身智能产业发展现状
具身智能应用场景演进(1)
具身智能应用场景演进(2)
具身智能市场趋势
具身智能中国市场规模
具身智能全球人形机器人出货规模
1.3 具身智能应用前景
应用前景总结
具身智能应用场景市场占比
社区家庭场景:家庭服务(1)
社区家庭场景:家庭服务(2)
社区家庭场景:医疗/护理场景(1)
社区家庭场景:医疗/护理场景(2)
智能制造场景:工厂生产
智能制造场景:Figure人形机器人进入工厂实现全天候工作
智能制造场景:优必选WalkerS2在智慧工厂群体协同作业
智能制造场景:农业生产
商业服务场景:擎朗智能
商业服务场景:美团“小黄蜂”
高危/救援场景:云深处科技山猫M20轮足机器人
高危/救援场景:捷视飞通“灵眸”应急救援搜救四足机器人与导盲犬
1.4 具身智能主机厂竞争总结
国内TOP50主流具身智能供应商(1)
国内TOP50主流具身智能供应商(2)
国外TOP10主流具身智能供应商(1)
2025年全球人形机器人出货量TOP10(主流统计口径)
具身智能代表企业营收分析(1)
具身智能代表企业营收分析(2)
具身智能代表企业技术路线分析(1)
具身智能代表企业技术路线分析(2)
具身智能代表企业技术路线分析(3)
02 具身智能软硬件系统构架
2.1 具身智能硬件架构
具身智能:硬件本体系统介绍
具身智能硬件清单
具身智能芯片清单
机器人全栈芯片解决方案(1)
机器人全栈芯片解决方案(2)
机器人全栈芯片解决方案(3)
机器人全栈芯片解决方案(4)
机器人全栈芯片解决方案(5)
机器人全栈芯片解决方案(6)
2.1.1 具身智能硬件系统:算力与硬件控制系统
具身智能硬件系统:算力与硬件控制系统
具身智能硬件系统:“大脑”系统:主控SoC应用(1)
具身智能硬件系统:“大脑”系统:主控SoC应用(2)
具身智能硬件系统:“小脑”系统:FPGA的应用
FPGA解决方案(1)
FPGA解决方案(2)
FPGA解决方案(3)
具身智能硬件系统:“小脑”系统:MCU的应用
具身智能硬件系统:“小脑”系统:英飞凌MCU解决方案
具身智能算法:大脑控制技术路线:视觉-语言-动作模型(VLA)
具身智能算法:大脑控制技术路线:分层规划架构
具身智能算法:大脑控制技术路线:跨本体通用性系统
具身智能算法:小脑控制技术路线:基于模型的控制方法
具身智能算法:小脑控制技术路线:模仿学习
具身智能算法:小脑控制技术路线:深度强化学习
具身智能算法:大脑 - 小脑协同机制:传统分层协同架构
具身智能算法:大脑 - 小脑协同机制:新型类脑三系统架构("大脑 - 桥脑 - 小脑" )
2.1.2 具身智能硬件系统:机械系统
具身智能硬件系统:机械系统(仿生骨架)
具身智能机械系统:关节模组
具身智能机械系统:关节模组:电机及IC
具身智能机械系统:关节模组:减速器
具身智能机械系统:关节模组:驱动器与编码器
具身智能机械系统:关节模组:英飞凌驱动器解决方案(1)
具身智能机械系统:关节模组:英飞凌驱动器解决方案(2)
具身智能机械系统:关节模组:兆易创新关节控制解决方案
2.1.3 具身智能硬件系统:执行系统
具身智能硬件系统:执行系统(仿生肌肉)
2.1.4 具身智能硬件系统:电源热管理系统
具身智能硬件系统:电源系统
具身智能硬件系统:电源系统:电池组
具身智能硬件系统:电源系统:英飞凌解决方案
具身智能硬件:热管理系统
具身智能硬件:热管理系统方案
2.1.5 具身智能硬件系统:感知系统
具身智能硬件系统:感知系统
具身智能硬件系统:感知系统
具身智能硬件系统:感知系统:视觉传感器技术
具身智能硬件系统:感知系统:雷达传感器技术
具身智能硬件系统:感知系统:IMU 惯性测量单元技术
具身智能硬件系统:感知系统:英飞凌解决方案
2.2 具身智能软件构架
具身智能软件架构介绍
具身智能软件架构:硬件抽象层(HAL)
具身智能软件架构:驱动执行层
具身智能软件架构:实时控制层
具身智能软件架构:决策规划层
具身智能软件架构:应用层(非实时层级)
2.3 具身智能通信架构
具身智能通信协议
具身智能通信协议: 分层架构
具身智能通信协议:EtherCAT 的工作机制
具身智能通信协议:EtherCAT 结构
具身智能通信协议: CAN 的工作机制
具身智能通信协议: CAN FD的工作机制
具身智能通信协议: CAN FD网络框架
2.4 具身智能分级标准
具身智能等级划分
具身智能当前技术层级(1)
具身智能当前技术层级(2)
具身智能当前技术层级(3)
03 具身智能大脑(主控SoC芯片、控制器及大模型)研究
3.1 具身智能主控SoC:本体及芯片配套总结
3.1.1 具身智能主控SoC:本体及芯片配套总结:人形机器人
人形机器人主流端侧芯片与算法
人形机器人本体主控SoC芯片配置总结(1)
人形机器人本体主控SoC芯片配置总结(2)
人形机器人本体主控SoC芯片配置总结(3)
人形机器人本体主控SoC芯片配置总结(4)
人形机器人本体主控SoC芯片配置总结(5)
人形机器人本体主控SoC芯片配置总结(6)
人形机器人本体主控SoC芯片配置总结(7)
人形机器人本体主控SoC芯片配置总结(8)
3.1.2 具身智能主控SoC:本体及芯片配套总结:四组机器人
四足机器人主流端侧芯片与算法
四足机器人本体主控SoC芯片配置总结(1)
四足机器人本体主控SoC芯片配置总结(2)
3.1.3 具身智能主控SoC:本体及芯片配套总结:其他
其他类型机器人主流端侧芯片与算法
轮式双臂机器人本体主控SoC芯片配置总结(1)
轮式双臂机器人本体主控SoC芯片配置总结(2)
轮式双臂机器人本体主控SoC芯片配置总结(3)
3.2 具身智能主控SoC:芯片厂商总结分析
具身智能芯片厂商营收
具身智能芯片厂商分析:芯驰科技产品列表
具身智能芯片厂商分析:芯驰科技核心产品与演进路线
具身智能芯片厂商分析:英伟达产品列表
具身智能芯片厂商分析:英伟达核心产品与演进路线
具身智能芯片厂商分析:高通产品列表
具身智能芯片厂商分析:高通核心产品与演进路线
具身智能芯片厂商分析:英特尔产品列表
具身智能芯片厂商分析:高通核心产品与演进路线
具身智能芯片厂商分析:联发科产品列表
具身智能芯片厂商分析:联发科核心产品与演进路线
具身智能芯片厂商分析:瑞芯微产品列表
具身智能芯片厂商分析:瑞芯微核心产品与演进路线
具身智能芯片厂商分析:黑芝麻智能产品列表
具身智能芯片厂商分析:黑芝麻智能核心产品与演进路线
具身智能芯片厂商分析:寒武纪产品列表
具身智能芯片厂商分析:寒武纪核心产品与演进路线
3.3 具身智能主控SoC的技术演进路线
具身智能主控SoC的技术演进路线一(1)
具身智能主控SoC的技术演进路线一(2)
具身智能主控SoC的技术演进路线一(3)
具身智能主控SoC的技术演进路线二
具身智能主控SoC的技术演进路线三(1)
具身智能主控SoC的技术演进路线三(2)
3.4 具身智能控制器:本体及供应商总结
具身智能控制器厂商(1)
具身智能控制器厂商(2)
具身智能控制器厂商(3)
具身智能控制器厂商(4)
具身智能控制器厂商(5)
具身智能控制器厂商(6)
具身智能控制器厂商(7)
具身智能控制器厂商(8)
具身智能控制器厂商(9)
具身智能控制器厂商(10)
3.5 具身智大模型总结
3.5.1 具身智能大模型:VLA
VLA模型(Vision-Language-Action)
VLA模型开端:RT-1与RT-2
VLA模型技术深化:OpenVLA
VLA模型的广泛运用(1)
VLA模型的广泛运用(2)
VLA模型的广泛运用(3)
VLA模型的广泛运用(4)
3.5.2 具身智能大模型:世界模型
世界模型基本架构
世界模型关键定义及应用的发展
具身智能世界模型总结
具身智能世界模型(1)
具身智能世界模型(2)
具身智能世界模型(3)
具身智能世界模型(4)
具身智能世界模型(5)
具身智能世界模型(6)
具身智能世界模型(7)
3.5.3 具身智能模型轻量化部署
轻量化模型部署技术需求
多模态融合与轻量化的结合
轻量化技术:跨模态特征压缩
轻量化技术:动态模态选择
轻量化技术实现:HugWBC通用人形机器人控制器
轻量化技术实现:HOVER多模态神经网络控制器
轻量化技术实现:AMS(Agility Meets Stability)框架
04 具身智本体主流集成商分析
4.1 优必选
优必选产品及经营状况分析
优必选产品战略
优必选机器人:SoC配置总览
优必选机器人模型算法总览
优必选通用人形机器人产品参数对比(1)
优必选通用人形机器人产品参数对比(2)
优必选通用人形机器人产品参数对比(3)
优必选人形机器人Walker S2:专用Agent智能体技术
优必选人形机器人Walker S2:具身智能大模型Thinker
优必选人形机器人Walker S2:自助换电系统
优必选人形机器人Walker S2:端到端“类人眼”双目立体视觉感知
4.2智元机器人
智元机器人
智元机器人SoC配置总览(1)
智元机器人SoC配置总览(2)
智元机器人模型算法总览
智元人形机器人产品参数对比(1)
智元人形机器人产品参数对比(2)
智元人形机器人产品参数对比(3)
智元人形机器人:具身基座智元启元大模型(Genie Operator-1)
智元人形机器人:自研控制器系统
智元人形机器人:百万真机数据集开源项目AgiBot World
智元人形机器人:Powerflow 核心关节模组与硅光动语交互大模型
智元机器人供应链分析(1)
智元机器人供应链分析(2)
4.3 宇树科技
宇树科技公司简介
宇树机器人SoC配置总览(1)
宇树机器人SoC配置总览(2)
宇树机器人模型算法总览
宇树科技四足机器人产品参数对比(1)
宇树科技四足机器人产品参数对比(2)
宇树科技四足机器人产品参数对比(3)
宇树科技四足机器人产品参数对比(4)
宇树科技通用人形机器人产品参数对比(1)
宇树科技通用人形机器人产品参数对比(2)
宇树科技通用人形机器人产品参数对比(3)
宇树科技消费级机器狗As2:仿生具身大模型
宇树科技消费级机器狗As2:宇树科技自研4d激光雷达L2
宇树科技供应链分析
宇树科技的客群分析
4.4 乐聚机器人
乐聚机器人公司简介
乐聚机器人产品概览
乐聚机器人SoC配置总览
乐聚机器人模型算法总览
乐聚机器人产品参数对比(1)
乐聚机器人产品参数对比(2)
乐聚机器人产品参数对比(3)
乐聚机器人:全栈式数据采集与模型训练体系
乐聚机器人:乐聚科研框架 2.0(1)
乐聚机器人:乐聚科研框架 2.0(2)
乐聚机器人合作伙伴
4.5 加速进化
加速进化公司简介
加速进化机器人SoC配置总览
加速进化机器人产品参数对比(1)
加速进化机器人产品参数对比(2)
4.6 松延动力
松延动力基本简介
松延动力机器人SoC配置总览
松延动力模型算法总览
松延动力通用人形机器人产品参数(1)
松延动力通用人形机器人产品参数(2)
松延动力仿生人形机器人产品参数(1)
松延动力仿生机器人产品参数对比(2)
松延动力机器人:自研“灵柩”运动控制算法
松延动力仿生机器人:自研第二代仿生人头平台
松延动力机器人:自研表情驱动算法和自研多模态交互大模型。
4.7 众擎机器人
众擎机器人公司简介
众擎机器人SoC配置总览
众擎机器人产品参数对比(1)
众擎机器人产品参数对比(2)
众擎机器人控制运动算法专利:Sim2Real技术
众擎机器人:能源与结构专利
众擎机器人:关节技术专利
众擎机器人:供应链分析
4.8 北京星动纪元
北京星动纪元简介
星动纪元机器人SoC配置总览
星动纪元机器人模型算法总览
星动纪元机器人产品参数(1)
星动纪元机器人产品参数对比(2)
星动纪元机器人:Ctrl-World世界模型
星动纪元机器人:VLAW框架
星动纪元机器人:自研原生端到端具身大模型ERA-42
星动纪元机器人:星动XHAND1灵巧手
星动纪元供应链及成本构成:自研核心部件+战略供应商合作
4.9 傅利叶智能
傅利叶智能简介
傅利叶机器人SoC配置总览
傅利叶通用人形机器人产品参数对比(1)
傅利叶通用人形机器人产品参数对比(2)
傅利叶通用人形机器人产品参数对比(3)
傅利叶智能:FSA 2.0执行器
傅利叶智能:伽利略系统
4.10 极佳视界
极佳视界基本介绍
极佳视界机器人产品参数
极佳视界:GigaBrain
极佳视界:GigaWorld
4.11 小鹏IRON
小鹏汽车
小鹏IRON机器人:商业化进展及未来规划
小鹏IRON人形机器人:产品参数对比(1)
小鹏IRON人形机器人:产品参数对比(2)
小鹏IRON人形机器人:产品参数对比(3)
小鹏IRON人形机器人:产品参数对比(4)
小鹏IRON人形机器人:产品参数对比(5)
小鹏IRON机器人主控SoC芯片:自研图灵AI芯片
小鹏IRON机器人主控SoC芯片:自研图灵AI芯片详细参数
小鹏IRON机器人主控SoC芯片:自研图灵AI芯片参数解读
小鹏IRON机器人AI大模型:应用第二代VLA世界物理大模型
小鹏IRON机器人云端基座模型:可与汽车复用
小鹏IRON机器人感知系统:鹰眼视觉系统
小鹏IRON机器人成本及供应链构成:第一代IRON成本分析
4.12 小米
小米 CyberOne 机器人参数(1)
小米 CyberOne 机器人参数(2)
小米 CyberOne 机器人参数(3)
小米 CyberDog 机器狗参数
小米机器人:VLA基座模型Xioami-Robotics-0(1)
小米机器人:VLA基座模型Xioami-Robotics-0(2)
小米机器人:自研软件算法
小米机器人:Xiaomi CyberOne仿生手(1)
小米机器人:Xiaomi CyberOne仿生手(2)
小米机器人:自研动力系统
小米机器人成本及供应链构成
小米机器人商业化进展及未来规划
4.13 特斯拉
特斯拉Optimus参数(1)
特斯拉Optimus参数(2)
特斯拉Optimus参数(3)
人形机器人主流端侧算力芯片:特斯拉A15
特斯拉Optimus Gen 3运动控制:Dojo超算训练的强化学习模型
特斯拉Optimus Gen 3:复用FSD V12/V13的纯视觉神经网络架构(1)
特斯拉Optimus Gen 3:复用FSD V12/V13的纯视觉神经网络架构(2)
特斯拉Optimus Gen 3:复用FSD V12/V13的纯视觉神经网络架构(3)
特斯拉Optimus Gen 3:复用FSD V12/V13的纯视觉神经网络架构(4)
特斯拉Optimus Gen 3:复用FSD V12/V13的纯视觉神经网络架构(5)
特斯拉Optimus Gen 3:运动规划算法
特斯拉Optimus Gen 3:灵巧手(1)
特斯拉Optimus Gen 3:灵巧手(2)
特斯拉Optimus Gen 3:灵巧手(3)
特斯拉Optimus供应链
4.14 Figure AI
Figure AI 基本简介(1)
Figure AI 基本简介(2)
Figure AI机器人SoC配置及模型算法总览
Figure AI通用人形机器人产品参数对比(1)
Figure AI通用人形机器人产品参数对比(2)
Figure AI 机器人:Helix AI模型(1)
Figure AI 机器人:Helix AI模型(2)
Figure AI 机器人: BotQ人形机器人工厂
Figure AI 供应链分析
05 具身智能芯片主流厂商分析
5.1 芯驰科技
芯驰科技:具身智能产品应用及规划
芯驰科技:具身智能“大脑”SoC参数详情
芯驰科技:具身智能“小脑”SoC参数详情
芯驰科技具身智能“大脑”SoC:R1
芯驰科技智控小脑SoC:D9-MAX
芯驰科技智控小脑SoC D9-MAX:应用方案及开发套件
芯驰科技:具身智能高性能MCU参数详情
芯驰科技:基于 E3119 的关节模组解决方案
芯驰科技:基于 E3116 的灵巧手解决方案
芯驰科技:基于 E3118 的激光雷达解决方案
5.2 瑞芯微
瑞芯微
瑞芯微:具身智能芯片演进及未来发展
瑞芯微: RK3588系列产品参数(1)
瑞芯微:RK3588系列产品参数(2)
瑞芯微: RK182X协处理芯片、RV1126B图像处理器参数(1)
瑞芯微: RK182X协处理芯片、RV1126B图像处理器参数(2)
瑞芯微:RK182X系列协处理器及应用方案(1)
瑞芯微:RK182X系列协处理器及应用方案(2)
瑞芯微:RK3588
瑞芯微:RK3588系列应用方案与未来规划
瑞芯微RK3588应用方案:研华强固型视觉控制器
瑞芯微RK3588应用方案:高性能AMR机器人核心计算平台解决方案(1)
瑞芯微RK3588应用方案:高性能AMR机器人核心计算平台解决方案(2)
瑞芯微RK3588开发工具链:RKNN-Toolkit2
5.3 地平线(地瓜机器人)
地平线(地瓜机器人):具身智能芯片演进及未来发展
地平线(地瓜机器人):具身智能SoC产品参数(1)
地平线(地瓜机器人):具身智能SoC产品参数(2)
地平线(地瓜机器人):具身智能开发者套件产品参数(1)
地平线(地瓜机器人):具身智能开发者套件产品参数(2)
地平线(地瓜机器人):旭日5智能计算芯片,CPU+BPU异构结构
地平线(地瓜机器人):开源HoloBrain VLA基座模型
地平线(地瓜机器人):HoloMotion-1面向人形机器人小脑大模型(1)
地平线(地瓜机器人):HoloMotion-1面向人形机器人小脑大模型(2)
地平线(地瓜机器人)智能计算芯片应用生态:小牛电动两轮车智能出行
地平线(地瓜机器人)开发者套件应用生态:森云智能GMSL2系列相机模组
5.4 黑芝麻智能
黑芝麻智能:具身智能芯片演进及未来发展
黑芝麻智能:华山 A2000(1)
黑芝麻智能:华山 A2000(2)
黑芝麻智能:SesameX具身智能计算平台模组(1)
黑芝麻智能:SesameX具身智能计算平台模组(2)
黑芝麻智能华山 A2000
黑芝麻智能华山 A2000:采用自研九韶构架NPU核
黑芝麻智能华山 A2000:高效易用山海AI工具链
黑芝麻智能 SesameX:全栈机器人平台系统
黑芝麻智能SesameX:全栈机器人平台系统
5.5 寒武纪
寒武纪:具身智能芯片演进及未来发展
寒武纪具身智能芯片详细参数(1)
寒武纪具身智能芯片详细参数(2)
寒武纪思元590:自助研发智能处理器微架构MLUarch05
寒武纪人工智能计算库:Cambricon CNNL
寒武纪计算机视觉库:CNCV
寒武纪软件开发平台:Cambricon NeuWare
寒武纪MLU推理加速引擎:MagicMind
5.6 英伟达
英伟达
英伟达:具身智能SoC芯片系列及其发展演进
人形机器人主流端侧算力芯片:NVIDIA Jetson Orin
英伟达:NVIDIA Jetson Orin参数详情(1)
英伟达:NVIDIA Jetson Orin参数详情(2)
人形机器人主流端侧算力芯片:NVIDIA Jetson Thor
英伟达: NVIDIA Jetson Thor参数详情(1)
英伟达: NVIDIA Jetson Thor参数详情(2)
英伟达NVIDIA Jetson Thor:GPU采用Blackwell架构
英伟达NVIDIA Jetson Thor:面向视觉AI智能体的NVIDIA Metropolis
英伟达NVIDIA Jetson Thor:面向传感器处理NVIDIA Holoscan,实现实时数据流传输
英伟达NVIDIA Jetson Thor:JetPack 7为构建 AI 边缘应用提供完整工具与库
英伟达NVIDIA Jetson Thor:与Isaac开源机器人平台协同
英伟达 DreamZero世界动作模型(WAM)
英伟达 DreamZero 世界动作模型(WAM)模型架构
英伟达 DreamZero 世界动作模型( WAM)优势
英伟达开放式多模态模型:Nemotron 3 Nano Omni 模型
5.7 高通
高通:具身智能芯片演进及未来发展
高通:跃龙系列芯片IQ10、IQ9详细参数(1)
高通:跃龙系列芯片IQ10、IQ9详细参数(2)
高通:跃龙系列芯片IQ8、IQ6、QCS8550详细参数(1)
高通:跃龙系列芯片IQ8、IQ6、QCS8550详细参数(2)
高通:IQ10系列
高通QCS8550应用方案:Robrain AI机器人结解决方案
5.8 Intel
英特尔:具身智能SoC芯片系列及其发展演进
英特尔:酷睿Ultra系列产品参数对比
英特尔:Intel Core i7系列参数详情(1)
英特尔:Intel Core i7系列参数详情(2)
英特尔:Intel Core i5系列参数详情(1)
英特尔:Intel Core i5系列参数详情(2)
英特尔机器人端侧算力芯片:第三代酷睿Ultra
英特尔第三代酷睿Ultra:18A工艺制程
英特尔第三代酷睿Ultra GPU架构:Xe3
英特尔第三代酷睿Ultra搭载NPU 5:专门为AI任务优化
5.9 联发科
联发科:具身智能芯片演进及未来发展
联发科:Genio Pro、Genio 420、Genio 360(1)
联发科:Genio Pro、Genio 420、Genio 360(2)
联发科:天玑9400、天玑9400+(1)
联发科:天玑9400、天玑9400+(2)
联发科:Genio Pro
联发科:Genio 420
联发科: Genio 360
联发科:支持MediaTek NeuroPilot Al软件开发套件
5.10 理想
理想:马赫M100产品参数(1)
理想:马赫M100产品参数(2)
理想:自研芯片马赫M100
理想:自研芯片马赫M100内部结构
理想:自研芯片马赫M100 CPU结构
理想:自研芯片马赫M100 NPU结构
5.11 后摩智能
后摩智能:具身智能芯片演进及未来发展
后摩智能:后摩漫界M50芯片(1)
后摩智能:后摩漫界M50芯片(2)
后摩漫界M50:搭载“天璇”架构:自研第二代存算IPU设计
后摩漫界M50工具链:后摩大道
5.12 辉羲智能
辉羲智能:具身智能芯片演进及未来发展
辉羲智能:辉羲R1(1)
辉羲智能:辉羲R1(2)
辉羲智能:自研图灵完备指令集
辉羲智能:自研RPU神经网络加速器
辉羲智能:创新功能安全架构RIF